Навигация
Асинхронные двигатели в системах электропривода
27592
знака
3
таблицы
7
изображений
Асинхронные двигатели в системах электропривода
Курсовая работа
по дисциплине «Электрические машины и электропривод»
Курсовая работа содержит 27 страниц, 8 рисунков, 3 таблицы, 6 использованных источников.
Асинхронный двигатель, короткозамкнутый ротор, фазный ротор, пусковой реостат, электрические потери, тепловое состояние, эквивалентная мощность, номинальный момент.
Объектом исследования является асинхронный двигатель с фазным ротором.
Цель работы - расчет основных параметров и характеристик АД, изучение пусковых схем.
Курсовая работа содержит расчет асинхронного двигателя 4АК225M6УЗ серии 4А с фазным ротором.
В курсовой работе определена, по заданной нагрузочной диаграмме электропривода, эквивалентная мощность и выбран асинхронный двигатель с фазным ротором. Произведена проверка выбранного двигателя на нагрев по методу средних потерь, а так же проверка на перегрузочную способность при снижении напряжения в сети, расчет теплового режима выбранного двигателя по заданной нагрузочной диаграмме
Определено сопротивление добавочного резистора, который необходимо включить в цепь ротора, выбранного двигателя для снижения частоты вращения на заданную величину при номинальном моменте сопротивления. Построены естественная и реостатная характеристики выбранного двигателя.
Рассчитаны сопротивления секций пускового резистора и потери электрической энергии при реостатном и прямом пуске, начерчены и изучены схемы управления пуском и реверсом асинхронных двигателей.
Содержание
Задание
Введение
1.Асинхронные двигатели в системах электропривода
1.1 Параметры задания и выбор варианта задания
1.2 Расчет эквивалентной мощности и выбор АД 1.3 Проверка выбранного двигателя по нагреву 1.4 Проверка на перегрузку при снижении напряжения 1.5 Расчет теплового состояния АД 1.6 Расчет механических характеристик1.7 Расчет резисторов пускового реостата
1.8 Расчет электрических потерь при пуске двигателя
2 Управление пуском асинхронных двигателей2.1 Общие положения
2.2 Управление пуском АД с короткозамкнутым ротором2.3 Управление пуском АД с фазным ротором в функции времени
3 Управление реверсом АД с короткозамкнутым ротором
Заключение
Библиографический список
Введение
Асинхронные двигатели широко используются в промышленности благодаря простоте их конструкции, надежности в эксплуатации и сравнительно низкой себестоимости.
Наиболее простыми в отношении устройства и управления, надежными в эксплуатации, имеющими наименьшую массу, габариты и стоимость при определенной мощности, являются асинхронные двигатели с короткозамкнутым ротором. Их масса на единицу мощности в 1,5-2,0 раза ниже, чем у машин постоянного тока. Чаще всего асинхронные двигатели применяются при невысокой частоте включений, когда не регулируют частоту вращения или возможно ступенчатое её регулирование.
В установках, где требуется регулирование частоты вращения в относительно небольших пределах, необходимы плавный пуск, хорошие тормозные качества, ограничение токов в переходных процессах и т.д., находят широкое применение асинхронные двигатели с фазным ротором. Характерной особенностью этих двигателей является возможность уменьшения с помощью реостатов их пусковых токов при одновременном увеличении пускового момента.
При выборе двигателя по мощности следует исходить из необходимости его полного использования в процессе работы. В случае завышения номинальной мощности двигателя снижаются технико-экономические показатели электропривода, т.е. КПД и коэффициент мощности. Если же нагрузка на валу двигателя превышает номинальную, то это приводит к росту токов в его обмотках, а значит и потерь мощности выше соответствующих номинальных значений.
Для обоснованного выбора асинхронного двигателя необходимо знать, как изменяется нагрузка на валу двигателя во времени, что в свою очередь позволяет судить о характере изменения потерь мощности. С целью определения нагрузки двигателя большинства производственных механизмов, строятся так называемые нагрузочные диаграммы, под которыми понимаются зависимости развиваемых двигателем момента и мощности от времени, т.е. M=f(t) и P=f(t).
Различают следующие режимы работы двигателя: продолжительный при постоянной нагрузке на валу двигателя; кратковременный; повторно-кратковременный; ударный (момент статистической нагрузки резко увеличивается по различным законам, а затем снижается до момента холостого хода).
1 Асинхронные двигатели в системах электропривода 1.1 Параметры задания и выбор варианта задания
Вариант задания выбирается по двузначному шифру, присвоенному студенту преподавателем; для студентов заочной формы обучения – по двум последним цифрам шифра зачетной книжки.
Параметры нагрузки на каждой ступени, синхронная частота вращения АД и требуемое снижение частоты вращения ротора в процентах от номинальной приведены в таблице 1.1, а длительность ступеней – в таблице 1.2.
При расчете принять, что в период паузы (t5) двигатель работает в режиме холостого хода без отключения от сети.
Напряжение питающей (цеховой) сети принять в зависимости от мощности двигателя:
от 22 до 75 кВт – 380 В,
от 45 до 110 кВт – 660 В,
от 45 до 75 кВт – 380 либо 660 В (выбрать по желанию).
Снижение напряжения в питающей сети для проверки выбранного АД на перегрузочную способность принять 10 % от номинального для всех вариантов.
Число ступеней пускового реостата для всех вариантов z = 2.
Таблица 1.1 - Параметры нагрузки
| Последняя цифра варианта | Мощность на ступенях нагрузки, кВт | Синхронная частота вращения, об/мин | ∆n, % | |||
| Р1 | Р2 | Р3 | Р4 | |||
| 0 | 3 | 5 | 9 | 4 | 750 | 5,8 |
| 1 | 7 | 13 | 9 | 18 | 750 | 5,5 |
| 2 | 15 | 10 | 35 | 22 | 750 | 4,6 |
| 3 | 13 | 6 | 10 | 5 | 1000 | 4,8 |
| 4 | 18 | 22 | 9 | 12 | 1000 | 4,0 |
| 5 | 22 | 30 | 40 | 25 | 1000 | 4,5 |
| 6 | 8 | 15 | 5 | 18 | 1000 | 4,2 |
| 7 | 25 | 12 | 15 | 10 | 1500 | 5,0 |
| 8 | 25 | 35 | 45 | 12 | 1500 | 5,7 |
| 9 | 45 | 27 | 40 | 50 | 1500 | 6,0 |
Таблица 1.2 - Длительность ступеней нагрузки
| Длительность ступеней нагрузки, мин | Предпоследняя цифра варианта (шифра) | |||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| t1 | 10 | 13 | 12 | 13 | 9 | 6 | 16 | 10 | 11 | 7 |
| t2 | 5 | 7 | 9 | 8 | 15 | 8 | 6 | 12 | 7 | 14 |
| t3 | 15 | 9 | 14 | 9 | 8 | 18 | 13 | 15 | 18 | 10 |
| t4 | 8 | 13 | 8 | 11 | 12 | 10 | 9 | 6 | 9 | 13 |
| t5 | 7 | 8 | 7 | 4 | 6 | 8 | 6 | 7 | 5 | 6 |
Из приведенных таблиц 1.1 и 1.2 в соответствии с вариантом 08 следует:
мощности на ступенях нагрузки, кВт,
Р1=22, Р2=30, Р3=40, Р4=25,
длительность каждой ступени нагрузки, мин,
t1=13, t2=7, t3=9, t4=13, t5=8.
Синхронная частота вращения АД–1000об/мин. Требуемое снижение частоты вращения на реостатной характеристике Δn=4,5%.
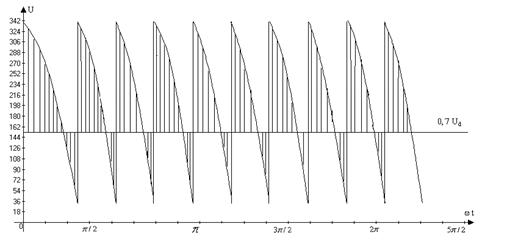
1.2 Расчет эквивалентной мощности и выбор АДМногоступенчатый график нагрузки, характеризующий длительный переменный режим работы электропривода (рисунок 1), можно привести к равномерному, воспользовавшись понятием эквивалентной (среднеквадратичной) мощности, кВт,
 , (1.1)
, (1.1)
где Pi– мощность, кВт,
ti– продолжительность нагрузки каждой i-й ступени графика, включая паузу, мин,
 кВт.
кВт.
По каталогу выбираем двигатель 4АК225M6УЗ, имеющий следующие параметры:
номинальная мощность Рн=30 кВт,
номинальное скольжение Sн=3,5%,
КПД в номинальном режиме hн=89%,
кратность номинального момента Km=2,5;
напряжение ротора Uр=140 В,
ток ротора Iр=150А,
постоянная времени нагрева Тн=30 мин,
суммарный момент инерции,
приведенный к валу двигателя J=55×10-2 кг×м2.
Характеристика двигателя 4АК225M6УЗ: двигатель серии 4А с фазным ротором; исполнение по способу защиты – IP44 – защита от проникновения внутрь оболочки предметов длиной до 80 мм и твердых тел размером свыше 12 мм; степень защиты от проникновения внутрь машины воды 3 ; станина алюминиевая, щиты чугунные; высота оси вращения – 225мм; установочный размер по длине станины средний; число полюсов–6; климатическое исполнение – УЗ, т.е. возможность эксплуатации электрической машины в зоне умеренного климата, в закрытых помещениях.
1.3 Проверка выбранного двигателя по нагревуВыбор АД гарантирует, что данный двигатель при заданном графике нагрузки удовлетворяет требованиям по нагреву, однако проведем проверку.
Проверка по нагреву производится по методу средних потерь. Для этого вначале определяются потери в номинальном режиме по данным каталога:
Потери в номинальном режиме, кВт,
 , (1.2)
, (1.2)
где Рн – номинальная мощность выбранного АД, кВт,
ηн – КПД в номинальном режиме по каталогу.
 кВт.
кВт.
Найденные потери являются суммой потерь в меди обмоток статора и ротора, в стали и механических. Будем считать, что механические потери остаются постоянными, тогда сумму потерь разделим на две группы:
-постоянные потери или потери х.х., включающие в себя потери в стали, механические и дополнительные,
-переменные потери в обмотках, изменяющиеся с изменением нагрузки.
В большинстве случаев соблюдаются следующие соотношения:
![]() , (1.3)
, (1.3)
![]() , (1.4)
, (1.4)
где Pм– потери в меди обмоток при номинальной нагрузке, кВт,
P0 – потери х.х. (постоянные потери), кВт.
![]() кВт,
кВт,
![]() кВт.
кВт.
Потери в обмотках являются переменными, они пропорциональны квадрату тока или квадрату коэффициента нагрузки. Исходя из этого:
Коэффициенты нагрузки по ступеням графика
 , (1.5)
, (1.5)
где Pi – мощность i-й ступени нагрузки,
Кнi – коэффициент нагрузки i-й ступени.
 кВт,
кВт,
 кВт,
кВт,
 кВт,
кВт,
 кВт,
кВт,
 кВт.
кВт.
Потери на каждой ступени графика нагрузки, кВт,
![]() , (1.6)
, (1.6)
![]() кВт,
кВт,
![]() кВт,
кВт,
![]() кВт,
кВт,
![]() кВт,
кВт,
![]() кВт.
кВт.
Средние потери за цикл, кВт,
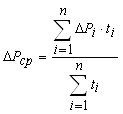 , (1.7)
, (1.7)
 кВт .
кВт .
Проверка выбранного двигателя по нагреву заключается в проверке условия:
![]() , (1.8)
, (1.8)
3,179 кВт < 3,708 кВт.
В нашем случае условие выполняется.
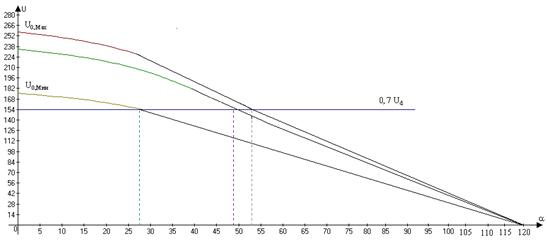
1.4 Проверка на перегрузку при снижении напряженияВ заводских силовых электрических цепях допускается снижение напряжения на 10%. Естественно, что при таком снижении напряжения оборудование не должно терять работоспособность. В то же время известно, что момент на валу асинхронных двигателей снижается пропорционально квадрату напряжения. Поэтому выбранный двигатель должен быть проверен на перегрузочную способность при понижении напряжения. Иногда может быть и большее понижение напряжения.
Проверка сводится к проверке условия, что максимальный момент двигателя при снижении напряжения будет не меньше момента сопротивления на валу.
Должно выполняться условие
![]() , (1.9)
, (1.9)
где Pmax – максимальная мощность по нагрузочной диаграмме, кВт,
ΔU – снижение напряжения, %, ΔU =10%,
Kmax– кратность максимального момента по каталогу.
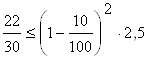 , или
, или ![]() – верно. Следовательно, двигатель сохраняет работоспособность при понижении напряжения в цеховой сети.
– верно. Следовательно, двигатель сохраняет работоспособность при понижении напряжения в цеховой сети.
Таким образом, выбранный двигатель удовлетворяет всем поставленным условиям.
1.5 Расчет теплового состояния АДНепосредственный расчет теплового режима электрической машины представляет собой сложную многофакторную задачу, решить которую возможно лишь при детальном конструктивном расчете. В данной работе рассмотрим этот процесс с качественной стороны, введя ряд допущений.
Одним из таких допущений будет представление АД однородным телом с равномерно распределенными внутри его объема источниками тепла, которыми являются потери. Процесс нагревания такого тела описывается уравнением:
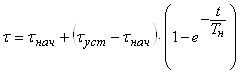 , (1.10)
, (1.10)
где τнач – начальное превышение температуры (в начале расчета τнач =0), °C,
Тн – постоянная времени нагревания,
τуст – установившееся превышение температуры.
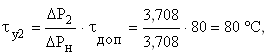
Если принять установившееся превышение температуры в оминальном режиме равным допустимому для данного класса термостойкости изоляции, то для любого иного режима
![]() , (1.11)
, (1.11)
где τдоп – допустимое превышение температуры, в данном случае
τдоп =80°C,
ΔРi – потери на i-й ступени нагрузки, кВт.
![]()


 °С.
°С.
За начальное превышение температуры каждой ступени, включая паузу, принимаем конечное превышение, рассчитанное в конце предыдущей ступени.
Реальные превышения температуры, °С:
в течение первого цикла -
![]() °С,
°С,
![]() °С,
°С,
![]() °С,
°С,
![]() °С ,
°С ,
![]() °С,
°С,
в течение второго цикла –
![]() °С,
°С,
![]() °С,
°С,
![]() °С,
°С,
![]() °С,
°С,
![]() °С,
°С,
в течение третьего цикла -
![]() °С,
°С,
![]() °С,
°С,
![]() °С,
°С,
![]() °С,
°С,
![]() °С,
°С,
Как видно, превышения температуры после третьего цикла остаются практически неизменными, т.е. тепловой режим двигателя достиг установившегося состояния.
![]() , (1.12)
, (1.12)
 , (1.13)
, (1.13)
 33,34 ˚С;
33,34 ˚С;
 50,49 ˚С;
50,49 ˚С;
 59,29 ˚С;
59,29 ˚С;
 63,81 ˚С;
63,81 ˚С;
 66,13 ˚С;
66,13 ˚С;
 68,24 ˚С;
68,24 ˚С;
 68,49˚С;
68,49˚С;
Механическими характеристиками АД называют зависимости М=f(s) и n=f(M).
Аналитические выражения данных характеристик достаточно сложны, требуют знания многих параметров АД и для практических целей используются редко. Более удобной является так называемая формула Клосса, вполне удовлетворительно описывающая реальную характеристику в пределах изменения скольжения от 0 до критического Sк. Вторая часть характеристики, рассчитанная по формуле Клосса, существенно отличается от реальной. Однако в этой части асинхронные двигатели не работают, и практического значения для анализа задач электропривода она не представляет.
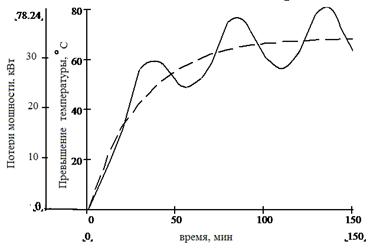
Рисунок 1- Диаграмма потерь и кривые нагрева
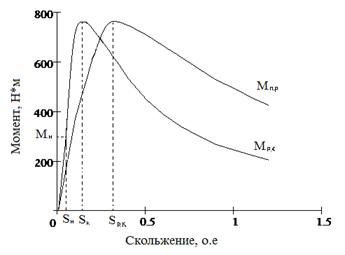
Рисунок 2- Механическая характеристика M=f(s)
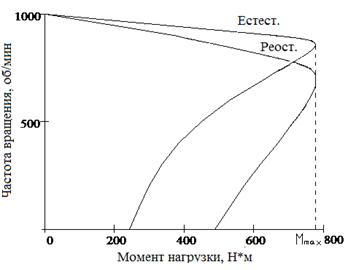
Рисунок 3- Механическая характеристика n=f(Me)
Для расчета естественной механической характеристики находим:
номинальную частоту вращения, об/мин,
![]() , (1.14)
, (1.14)
где n1– синхронная частота вращения, об/мин,
Sн – номинальное скольжение по каталогу, о.е.
![]() об/мин,
об/мин,
номинальный момент, Н·м,
![]() , (1.15)
, (1.15)
где Рн– номинальная мощность,
![]() Н·м,
Н·м,
критическое скольжение, соответствующее максимальному моменту,
![]() , (1.16)
, (1.16)
где Sн– номинальное скольжение,
Км – кратность номинального момента.
![]() ,
,
максимальный момент, Н·м,
![]() , (1.17)
, (1.17)
![]() Н·м.
Н·м.
Задавшись величиной S от 0 до 1,2, можно рассчитать зависимость М=f(s), которую затем легко перевести в координаты n=f(M) по формуле:
![]() . (1.18)
. (1.18)
Расчет механической характеристики производим по упрощенной формуле Клосса, Н·м,
 (1.19)
(1.19)
где Км– коэффициент перегрузочной способности,
S – текущее значение скольжения,
Sк– критическое скольжение,
Мн – номинальный момент на валу двигателя, Н·м.
При отсутствии резисторов в цепи ротора имеем естественные характеристики.
Результаты расчета приведены в таблице 1.3, характеристики показаны на рисунках 2, 3, 4.
Таблица 1.3 – Механические характеристики выбранного АД
| Исследуемые параметры машины S | 0 | SН=0,035 | 0,1 | SK=0.168 | 0,2 | SР.К=0,376 | 0,4 | 0,8 | 0,1 | 0,12 |
| Частота вращения ротора n, об/мин | 1000 | 965 | 900 | 832 | 800 | 624 | 600 | 200 | 0 | 0 |
| Моменты М, Н·м: | ||||||||||
| естественная характеристика | 0 | 233,81 | 653,00 | 641.58 | 730,9 | 514,914 | 529,3 | 298,1 | 242,1 | 203,5 |
| реостатная характеристика | 0 | 121,35 | 368,93 | 485.94 | 615,7 | 645,247 | 740,78 | 571,2 | 488,8 | 423,3 |
Введение добавочного сопротивления в цепь ротора приводит к увеличению критического скольжения, величина максимального момента при этом не изменяется. Иными словами, механическая характеристика смещается вниз, а М=f(s) – вправо. Тем самым при постоянном моменте сопротивления Мс частота вращения несколько снижается.
При реостатной характеристике частота вращения ротора, при заданном Δn=4,5%, об/мин,
![]() , (1.20)
, (1.20)
 об/мин,
об/мин,
скольжение, соответствующее данной частоте вращения,
 , (1.21)
, (1.21)
![]() .
.
![]() Сопротивление ротора выбранного двигателя, Ом,
Сопротивление ротора выбранного двигателя, Ом,
 (1.22)
(1.22)
 Ом,
Ом,
тогда необходимое добавочное сопротивление, Ом,
![]() , (1.23)
, (1.23)
 Ом.
Ом.
Критическое скольжение на реостатной характеристике,
![]() , (1.24)
, (1.24)
 .
.
1.7 Расчет резисторов пускового реостата
Пусковые диаграммы строим по моментам М1 и М2.
По заданию пуск двигателя производится при Мс=0. Выбираем пиковый момент, Н·м,
![]() , (1.25)
, (1.25)
![]() Н·м.
Н·м.
По условию задания число пусковых ступеней z=2, тогда переключающий момент, Н·м,
![]() , (1.26)
, (1.26)
 Н·м,
Н·м,
или М2=0,36Мн, что вполне допустимо при пуске в режиме х.х.

Рисунок 5- Пусковая диаграмма
По найденным моментам построена пусковая диаграмма (рисунок 5), из которой получаем соотношение отрезков: ab/cd и bc/cd.
Следовательно, сопротивление секций пускового реостата, Ом,
![]() ,
, ![]() , (1.27)
, (1.27)
![]() Ом,
Ом,
![]() Ом.
Ом.
Похожие работы
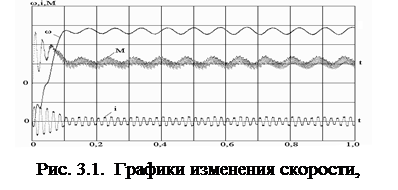
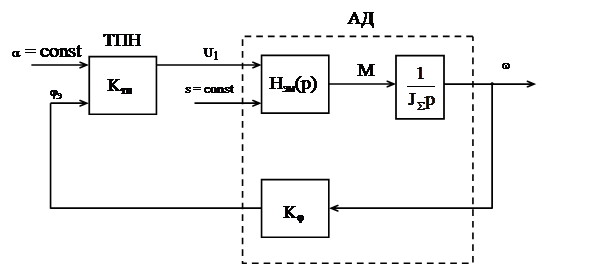
... больших колебаний (рис 3.2). В данном случае скорость двигателя может превысить синхронную, а область колебаний охватывает первый и второй квадранты. 2. Методика исследования устойчивости разомкнутой системы электропривода ТПН-АД Динамические свойства асинхронных двигателей. Реальные переходные процессы асинхронного электропривода сопровождаются изменением скорости двигателя. Однако, в ряде ...
... частоты на IGBT транзисторах, для частотно-регулируемого энергосберегающего электропривода с асинхронным приводом. Нагрузкой асинхронного двигателя служит центробежный насос для перекачки жидкости. Глава 1. Расчет управляемого выпрямителя для электродвигателя постоянного тока тиристорного электропривода 1.1 Выбор рациональной схемы управляемого выпрямителя и силовая часть электропривода ...
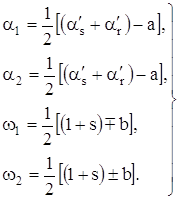
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
0 комментариев