Навигация
Расчет электрических потерь при пуске двигателя
27592
знака
3
таблицы
7
изображений
1.8 Расчет электрических потерь при пуске двигателя
Электрические потери при пуске асинхронных двигателей состоят из потерь в роторной цепи, определяемых запасом кинетической энергии, которую приобретает привод к концу пуска, и потерь в статорной цепи, зависящих от соотношения активных сопротивлений статорной и роторной цепей.
Незначительными постоянными потерями в процессе пуска и влиянием намагничивающего тока можно пренебречь.
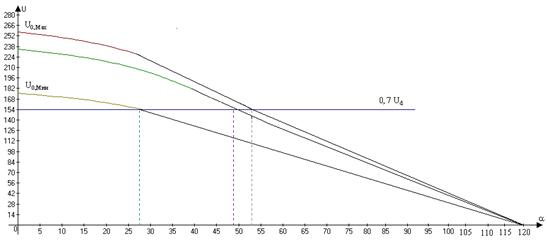
Для расчета электрических потерь необходимо предварительно определить скольжения при переходе с одной характеристики на другую. По пусковой диаграмме (рисунок 5) находим, что первое переключение должно быть при частоте вращения 958 об/мин, второе – 1304 об/мин, следовательно по уравнениям 1.28 скольжение соответствующее ей частоте-
![]() ,
, ![]() , (1.28)
, (1.28)
 ,
,
 .
.
Угловая синхронная частота вращения, рад/с,
![]() , (1.29)
, (1.29)
![]() рад/с.
рад/с.
В выражениях (1.30) – (1.32) присутствует соотношение сопротивлений ![]() , и если принять
, и если принять ![]() , то оно остается тем же в результате замены этого равенства на R1 = rр. В дальнейшем расчеты ведутся по реальным значениям сопротивлений ротора.
, то оно остается тем же в результате замены этого равенства на R1 = rр. В дальнейшем расчеты ведутся по реальным значениям сопротивлений ротора.
Потери электрической энергии, Дж, при реостатном пуске, принимая
R1 = rр,
на первой реостатной характеристике
 (1.30)
(1.30)
 Дж,
Дж,
на второй реостатной характеристике
 (1.31)
(1.31)
 Дж,
Дж,
на естественной характеристике
![]() , (1.32)
, (1.32)
![]() Дж.
Дж.
Суммарные электрические потери при реостатном пуске, Дж,
![]() , (1.33)
, (1.33)
![]() Дж,
Дж,
в практических единицах, кВт·ч,
 кВт·ч.
кВт·ч.
Для сравнения потери в случае прямого пуска, Дж,
![]() , (1.34)
, (1.34)
![]() Дж,
Дж,
в практических единицах, кВт·ч,
 кВт·ч.
кВт·ч.
Как видно, потери в случае прямого пуска больше, нежели при реостатном. Иначе говоря, при реостатном пуске экономится 775 кВт·ч.
2 Управление пуском асинхронных двигателей
2.1 Общие положенияУправление электроприводом заключается в осуществлении пуска, регулировании скорости, торможения, реверсирования, а так же поддержании режима работы привода в соответствии с требованиями технологического процесса.
Современные электроприводы для автоматических линий и механизмов обычно строятся с применением релейно–контакторной аппаратуры, на которую возлагаются функции включения питания (подсоединение к сети) силовых блоков и блоков управления, защиты и ввода первоначальных и конечных команд в систему управления приводом. Но наряду с электроприводами, выполняющими сложные функции, в ряде случаев содержащими микропроцессоры или программные устройства управления, существует большое количество электроприводов, на которые возлагаются относительно простые функции. Это обычно нерегулируемые или регулируемые ступенчато в небольшом диапазоне электроприводы с невысоким быстродействием. В задачу систем управления такими электроприводами чаще всего входит организация пуска, торможения, перехода с одной ступени на другую, реверса и осуществление этих операций в определенной последовательности во времени или по командам от рабочей машины, завершившей очередную технологическую операцию. Причем необязательно, чтобы система управления выполняла все эти функции: набор функций зависит от требований к приводу.
Автоматизация упрощает обслуживание механизмов, дает возможность осуществить дистанционное управление электроприводами. Последнее особенно важно там, где нельзя управлять двигателями в непосредственной близости по условиям территориального расположения машин или в связи с особенностями технологического процесса.
Для автоматического управления электроприводами применяются различные аппараты: контакторы, автоматы, регуляторы, реле, кнопочные станции, путевые выключатели, бесконтактные логические элементы, а так же разного рода вспомогательные электрические аппараты и машины. Каждый из этих аппаратов состоит из ряда элементов: электромагнитной системы, создающей необходимое тяговое усилие; главных и вспомогательных контактов и т.д. С помощью проводов отдельные аппараты и их элементы электрически соединяются в общую систему, призванную осуществлять заданные операции в определенной последовательности.
В системах цепи делятся на две категории: цепи главного тока и вспомогательные. К первым относятся цепи двигателей и генераторов. Вспомогательные цепи включают в себя цепи управления, где присоединяются катушки контактов и реле, контактные реле, вспомогательные контакты контакторов и другие элементы аппаратов. Кроме того, к вспомогательным относятся цепи защиты, сигнализации и цепи, связанные со специальными блокировками между отдельными электроприводами.
Принципиальная схема содержит условные графические изображения элементов всех аппаратов и машин, которые располагаются на схеме так, чтобы её было удобно читать, а не по действительному пространственному расположению элементов, т.е. отдельные токоведущие элементы аппаратов и машин показаны на схеме в электрической цепи вне зависимости от кинематической или конструктивной связи этих элементов. Каждому аппарату в схеме присваивается буквенное обозначение, соответствующее функции данного аппарата.
В схемах предусмотрены различные способы защиты двигателей от перегрузки и короткого замыкания, от резкого снижения питающего напряжения и др.
Похожие работы
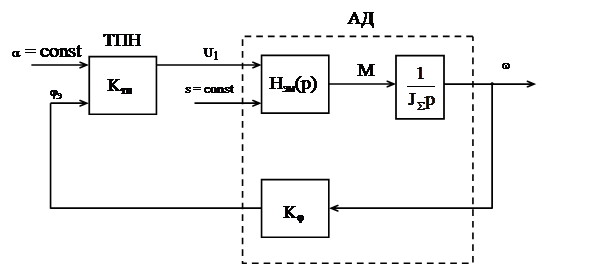
... больших колебаний (рис 3.2). В данном случае скорость двигателя может превысить синхронную, а область колебаний охватывает первый и второй квадранты. 2. Методика исследования устойчивости разомкнутой системы электропривода ТПН-АД Динамические свойства асинхронных двигателей. Реальные переходные процессы асинхронного электропривода сопровождаются изменением скорости двигателя. Однако, в ряде ...
... частоты на IGBT транзисторах, для частотно-регулируемого энергосберегающего электропривода с асинхронным приводом. Нагрузкой асинхронного двигателя служит центробежный насос для перекачки жидкости. Глава 1. Расчет управляемого выпрямителя для электродвигателя постоянного тока тиристорного электропривода 1.1 Выбор рациональной схемы управляемого выпрямителя и силовая часть электропривода ...
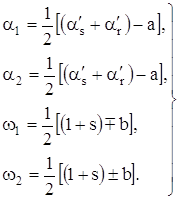
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
0 комментариев