Навигация
Расчет допускаемых напряжений изгиба
13371
знак
0
таблиц
1
изображение
2.3 Расчет допускаемых напряжений изгиба
Действительное число циклов при изгибе:
NF1 = NН1 = 87,4 · 107 циклов;
NF2 = NН2 = 9,7 · 107 циклов;
NFO = 4 · 106 циклов – базовое число циклов при изгибе.
Коэффициент долговечности КFL:
КFL1 = ![]() =
=  = 0,5; КFL2 =
= 0,5; КFL2 = ![]() =
=  = 0,67
= 0,67
Принимаем: КFL = 1.
SF = 1,7 – коэффициент безопасности при изгибе.
КFс = 1- коэффициент реверсивности.
Определим предельные напряжения при изгибе:
[σ]Flim1 = 2 НВСР1 = 2 · 290 = 580 МПа;
[σ]Flim2 = 2 НВСР2 = 2 · 270 = 540 МПа.
Определим допускаемые напряжения при изгибе:
[σ]F1 = ![]() КFL КFс = 580/1,7 = 341 МПа;
КFL КFс = 580/1,7 = 341 МПа;
[σ]F2 = ![]() КFL КFс = 540/1,7 = 318 МПа.
КFL КFс = 540/1,7 = 318 МПа.
Принимаем наименьшее: [σ]F = 318 МПа.
3. Проектный расчет зубчатой передачи
Внешний делительный диаметр колеса [1].
de2 ≥ 165 
Для прямозубых колес:
vH = kHΒ =1
de2 ≥ 165  = 240,8 мм
= 240,8 мм
По ГОСТ 6636-69 принимаем de2= 250 мм.
Углы делительных конусов.
δ2 = arctg(Uк.п.) = arctg 3 = 71,57º; δ1 = 90º - δ2 = 18,43º
Внешнее конусное расстояние:
Re = de2 / 2sin(δ2) = 250 / 2sin 71,57 = 131,8 мм
Ширина зубчатого венца шестерни и колеса:
b = 0,285Re = 0,285 · 131,8 = 37,56 мм
Внешний окружной модуль:
me = ![]()
vF = 0,85 – для прямозубых колес,
KFβ = 1 для прямозубых колес.
me = ![]() = 1,58 мм
= 1,58 мм
Число зубьев колеса и шестерни:
z2 = de2 / me = 250 / 1,58 = 158,6, принимаем z2 = 159.
z1 = z2 / Uк.п. = 159 / 3 = 53.
Передаточное число:
Uф = 159 / 53 = 3, отклонение ΔU = 0,02U - допустимо.
Внешние диаметры шестерни и колеса.
Делительные диаметры:
de1 = me z1 = 1,58 · 53 = 83,74 мм;
de2 = me z2 = 1,58 · 159 = 251,22 мм.
Диаметры вершин:
dae1 = de1 + 2(1 + Xe1) me cosδ1
dae2 = de2 + 2(1 - Xe2) me cosδ2
Xe1 = 0,34 – коэффициент смещения [1].
dae1 = 83,74 + 2 · 1,34 · 1,58 · cos18,43º = 87,76 мм
dae2 = 251,22 + 2 · 0,66 · 1,58 · cos71,57º = 251,88 мм
Средние делительные диаметры:
d1 = 0,857de1= 0,857 · 83,74 = 71,8 мм
d2 = 0,857de2 = 0,857 · 251,22 = 215,3 мм
Проверочный расчет.
Проверка контактных напряжений.
σН = 470 ≤ [σ]H,
≤ [σ]H,
где Ft = ![]() =
= ![]() = 2655 H – окружная сила в зацеплении.
= 2655 H – окружная сила в зацеплении.
VH = KHβ = KHα = 1
Величину KHv находим из [1], в зависимости от класса прочности и окружной скорости.
V = ω2d2 / 2 · 103 = 10,5 · 215,3 / 2 · 103 = 1,13 м/с
KHv = 1,04
σН = 470 = 452 МПа < [σ]Н = 525 МПа
= 452 МПа < [σ]Н = 525 МПа
Проверка напряжения изгиба.
σF2 = YF2 Yβ![]() KFα KFβ KFv ≤ [σ]F
KFα KFβ KFv ≤ [σ]F
Yβ = KFα = KFβ =1, vF = 0,85, KFv = 1,01, YF2 = 3,63 [4].
zv2 = z2 / cos δ2 = 159 / cos 71,57º = 503,2
σF2 = 3,63 · ![]() · 1,01 = 193 МПа ≤ [σ]F = 318 МПа
· 1,01 = 193 МПа ≤ [σ]F = 318 МПа
Силы в зацеплении:
Fr1 = Fa2 = Ft · tgα · cos δ1 = 2655 · tg 20º · cos18,43º = 907 H
Fa1 = Fr2 = Ft · tgα · cos δ2 = 2655 · tg 20º · cos 71,57º = 302 H
Похожие работы
... безопасности. Для этого необходимо выделить всё оборудование и технологии, задействованные в проекте и определить все связанные с ними опасные и вредные производственные факторы. Адиабатная установка термического обессоливания включает в себя следующее оборудование: - камеры испарения со встроенными поверхностными конденсаторами; - конденсаторы; - циркуляционные, конденсатные и вакуумные ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
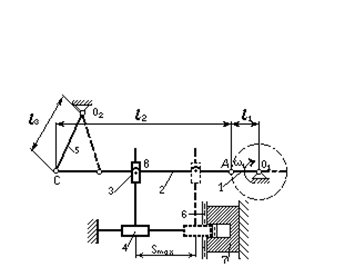
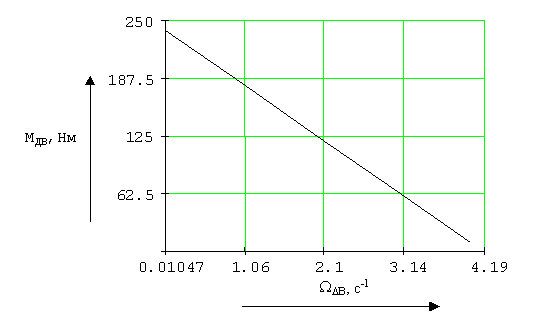
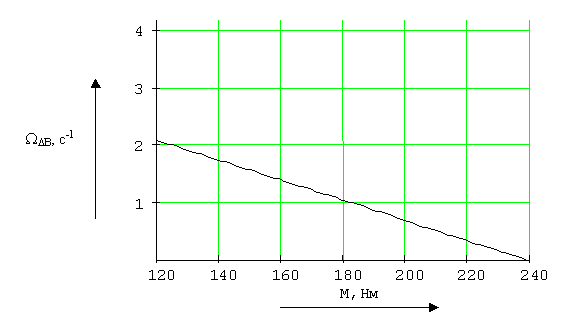
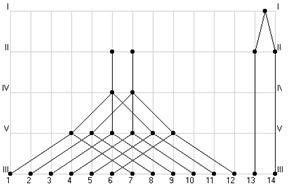
... характеристик решим графо-аналитическим методом, который основан на построении ряда последовательных положений звеньев механизма и соответствующих им планов скоростей. Механизм привода пресс-автомата с плавающим ползуном в масштабе μL=0,006 м/мм изобразим в двенадцати положениях. Положение механизма задаётся положением кривошипа 1. Каждое последующее положение кривошипа 1 отличается от ...
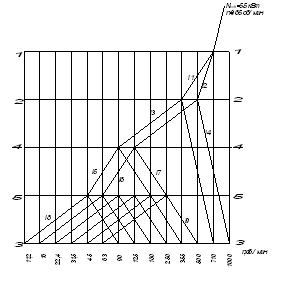
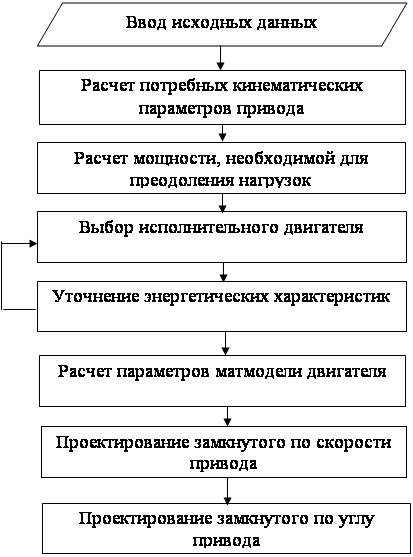
... СМАЗКИ 7. ВЫБОР СИСТЕМЫ УПРАВЛЕНИЯ ЗАКЛЮЧЕНИЕ ПЕРЕЧЕНЬ ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ ВВЕДЕНИЕ Приводы металлорежущих станков выполняют широкий спектр движений: рабочих, вспомогательных, установочных и т.д. При этом перемещается инструмент или заготовка. Кинематические и силовые характеристики коробки скоростей должны обеспечить требуемые значения величины скоростей при обработке на ...
0 комментариев