Навигация
Разработка структурной схемы САУ
15920
знаков
0
таблиц
12
изображений
2. Разработка структурной схемы САУ
В расчетных системах управления ЭП для повышения диапазона регулирования и качества динамических процессов применяют различные структуры построения регуляторов, используются различные обратные связи.
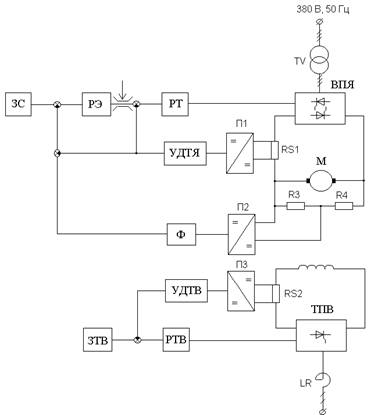
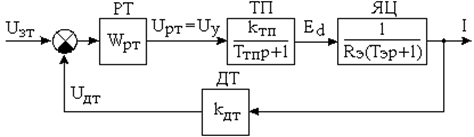
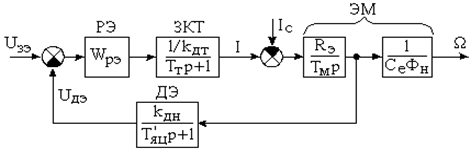
Для статического и динамического расчета САУ необходимо составить структурную схему, на которой все элементы системы нужно представить их передаточными функциями. Это двигатель, ТП, регуляторы, датчики обратных связей (рисунок 6).
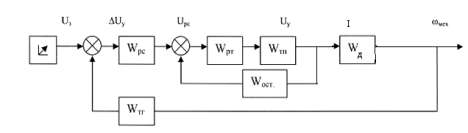
Рис. 2 -Структурная схема САУ
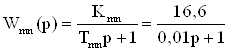
Передаточная функция ТП вместе с системой импульсно-фазового управления, как правило апроксируется апериодическим звеном первого порядка с постоянной времени Tmn в пределах времени 0,006-0,01 с, что обусловлено дискретностью подачи отпирающих импульсов и особенностью работы ТП.
Передаточная функция ТП имеет вид:
 (5.1)
(5.1)
где Kmn - коэффициент передачи ТП.
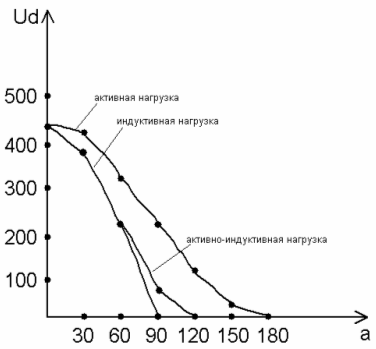
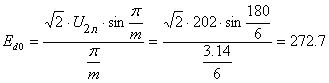
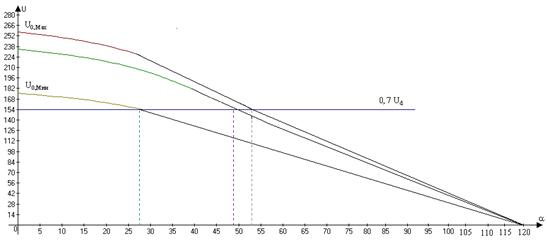
Коэффициент передачи ТП изменяется в зависимости от величины управляющего напряжения и рассчитывается с использованием
регулировочных характеристик Ed0 = f(α).
 , (5.2)
, (5.2)
где ΔEd — относительное значение ЭДС тиристорного преобразователя, В;
ΔUy - относительное значение напряжения, В.
Электродвигатель постоянного тока при подключении обмотки возбуждения к постоянному напряжению, работает с постоянной магнитным потоком.
Передаточная функция имеет вид:
 (5.3)
(5.3)
т.к. 4Тя>Тм,
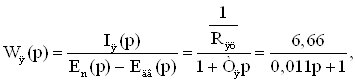
Якорная цепь ДПТ описывается передаточной функцией:
 (5.7)
(5.7)
где Еn - ЭДС преобразователя. В;
Едв - ЭДС двигателя, В.
Передаточная функция механической цепи ДПТ:
 (5.5)
(5.5)
Поведение угловой скорости вращения описывается передаточной функцией электромеханического преобразователя в соответствии с основным уравнением движения ЭП:
 (5.6)
(5.6)
Коэффициент обратных связей рассчитывается по формулам:
Коэффициент обратной связи по скорости Кос определяется по формуле:
 (5.7)
(5.7)
где ![]() = 10 В — максимальное напряжение управления;
= 10 В — максимальное напряжение управления;
![]() - максимальная скорость механизма, рад/с.
- максимальная скорость механизма, рад/с.
![]() (5.8)
(5.8)
Коэффициент обратной связи по току Кот:
Кот = Кдт ∙ Кш = 102,04∙0,0006 = 0,061 (5.9)
где Кдт - коэффициент датчика тока;
 (5.10)
(5.10)
где Кш - коэффициент шунта.
Выбран шунт: тип 75 ШСН-5;
Номинальный ток: Iнш = 75А;
Номинальное падение напряжения: Uнш= 0,045 В.
Коэффициент шунта Кш определяем по формуле:
 , (5.11)
, (5.11)
Коэффициент обратной связи по напряжению Кон:
 (5.12)
(5.12)
Выходной координатой объекта управления является угловая скорость вращения ωо, а промежуточными: якорный ток, ЭДС двигателя, напряжение якорной обмотки, электромагнитный момент, магнитный ток.
3. Синтез CAУ
Для обеспечения требуемых статических и динамических параметров определим структуру системы.
Поскольку необходимо регулировать скорость и требуется динамика, то система должна иметь контур скорости и контур тока. Настройку контура обычно производят так, чтобы получить технически оптимальный переходный процесс, т.е. настройка на технический оптимум.
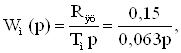
3.1 Расчет контура тока
Регулятор тока организован по ПИ-закону управления с настройкой на модульный оптимум. Регулятор для обеспечения требуемых динамических параметров должен компенсировать электромагнитную постоянную Тя, а также малую постоянную времени контура тока Т01 (рисунок9).
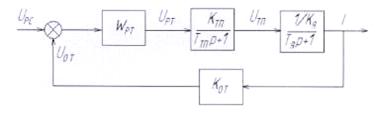
Рис. 3- Структурная схема по току
Передаточная функция регулятора тока имеет вид:
![]() (6.1)
(6.1)
где Крm - пропорциональная часть регулятора тока;
![]() - постоянная времени регулятора тока.
- постоянная времени регулятора тока.
 (6.2)
(6.2)
 (6.3)
(6.3)
где ![]() - малая постоянная времени токового контура.
- малая постоянная времени токового контура.
Тот = 2 ∙ Ттп = 2 ∙ 0,01 = 0,02 с, (6.4)
Согласно рисункам 4 и 5 запишем уравнения соответствия
динамических параметров системы и физических параметров схемы реализации:
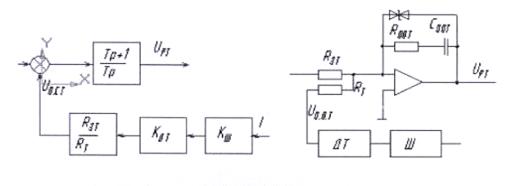
Рис. 4 -Структурная схема РТ Рис. 5- Принципиальная схема РТ
Зададимся емкостью конденсатора Cост= 1 мкФ = 0,000001 Ф, тогда согласно уравнению 2 системы 6.5, сопротивление Rост составит:
 , (6.6)
, (6.6)
Представив значение Сост = 1 мкФ в уравнение 3 системы 6.5, найдем сопротивление Rзт по формуле:
 (6.7)
(6.7)
Подставив значение Rзт в 1 - е уравнение системы 6.5, получим, что сопротивление Rт составит:
 (6.8)
(6.8)
По расчетам принимаем тип резисторов. Выбираем резисторы серии МЛТ.
Номинальная мощность: 0,125-2 Вт;
Диапазон сопротивления: 8,2 Ом – 10 МОм;
Рабочая температура: 125С0;
Допустимые отклонения: 5, 10, 20.
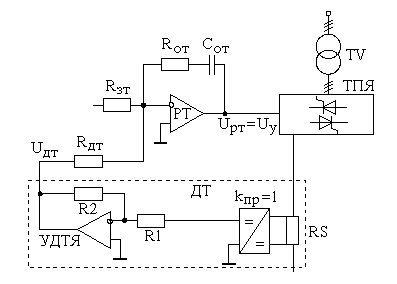
Датчик тока предназначен для преобразования тока якоря пропорциональное ему напряжение и включает в себя датчик и согласующее устройство. В качестве измерительного преобразователя в датчике использован шунт. В качестве элемента гальванической развязки принимаем микросхему оптоэлектронную полупроводниковую, состоящую из оптопар и транзисторных прерывателей типа К249, КН1Г. Выходное напряжение равно 3,5 В, входной ток равен 20 мА. На выходе датчика должно быть напряжение 10В.
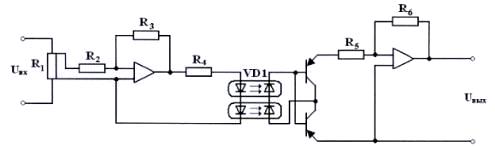
Рис. 6 - Принципиальная схема датчика тока
Похожие работы
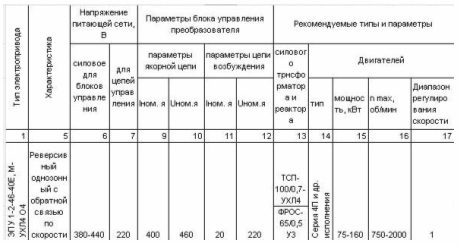

... имеют крутой передний фронт 2-5 мс, и малую длительность 10-15 градусов. Исходя из выше изложенных технических требований предъявляемых к системе управления, в проекте в качестве электропривода выбирается электропривод постоянного тока с тиристорным преобразователем, обеспечивающим регулирование напряжения на якоре двигателя. В соответствии с технологическими условиями производства система ...
... контура регулирования контур регулирования скорости двигателя. 4. Выбор комплектного тиристорного электропривода На основании выбранного электродвигателя произведем выбор промышленного комплектного тиристорного электропривода постоянного тока серии КТЭУ. Выбираем тиристорный электропривод КТЭУ 500/220-532-1ВМТД-УХЛ4. 800- Номинальный выходной ток 220- Номинальное выходное напряжение. 5- ...
... частоты на IGBT транзисторах, для частотно-регулируемого энергосберегающего электропривода с асинхронным приводом. Нагрузкой асинхронного двигателя служит центробежный насос для перекачки жидкости. Глава 1. Расчет управляемого выпрямителя для электродвигателя постоянного тока тиристорного электропривода 1.1 Выбор рациональной схемы управляемого выпрямителя и силовая часть электропривода ...
ерсивного тиристорного электропривода постоянного тока с обратной связью по ЭДС и стабилизацией тока возбуждения двигателя. Данный электропривод постоянного тока разрабатывается на основе комплектного тиристорного электропривода ЭПУ. Применение тиристорного электропривода позволяет оптимизировать его работу на отработку необходимых технологических операций. В данной курсовой работе необходимо ...
0 комментариев