Навигация
3.2 Расчет контура скорости
Регулятор скорости организован по пропорциональному принципу (П) закону управления с настройкой на модульный оптимум. Регулятор для обеспечения требуемых динамических параметров должен компенсировать электромеханическую постоянную времени системы Тм, а также малую постоянную времени контура скорости Тос (рисунок 6).
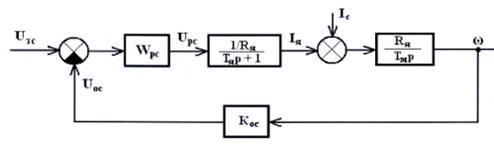
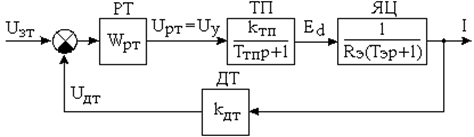
Рис. 7- Структурная схема контура скорости Передаточная функция регулятора скорости будет иметь вид:

где Тос - малая постоянная времени контура скорости.
Тос = 2∙ Тот = 4∙ Ттп = 4∙ 0,01 = 0,04 с,
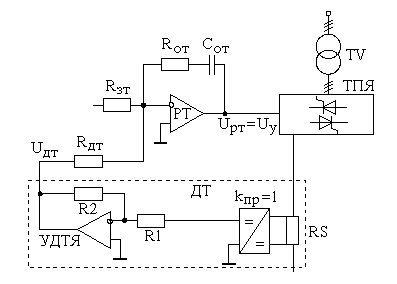
Приведем схему реализации регулятора скорости (рисунок 9).
Приведем структурную схему реализации регулятора скорости (рисунок 8).
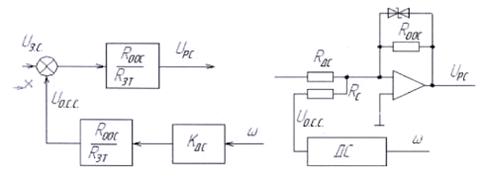
Рис. 8 Структурная схема PC Рис. 9 Схема реализации PC
Согласно рисункам 8 и 9 запишем уравнения соответствия динамических параметров системы и физических параметров схемы реализации:
 (6.11)
(6.11)
где Кдс - коэффициент датчика скорости, которым является тахогенератор.
![]() (6.12)
(6.12)
Зададимся сопротивлением Rooc = 100 кОм, тогда:
![]() (6.13)
(6.13)
Подставив значение Rзс, найдем Rc:
 (6.14)
(6.14)
Из справочника выбираем стандартный резистор марки:
Датчик скорости получим путем совмещения тахогенератора
(измерительного преобразователя) и согласующего устройства(преобразователя координат), рисунок 10
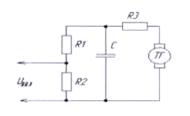
Рис. 10 Схема датчика скорости
Емкость конденсатора принимаем равной 0,1 мкФ. ЭДС тахогенератора определим по формуле:
Етг = 2 ∙nн ∙ S = 2 ∙ 1500∙ 0,5 = 1500 В, (6.15)
где S - величина скольжения;
nн - номинальная скорость вращения тахогенератора.
![]() (6.16)
(6.16)
где nн - номинальное число оборотов двигателя;
nmax - максимальное число оборотов тахогенератора.
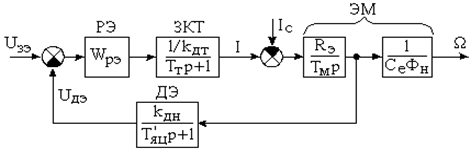
4. Структурная схема САУ

Рис.11- Структурная схема САУ
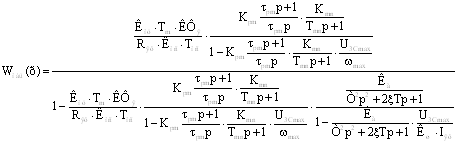
4.1 Определение общей передаточной функции
4.2 Характеристическое уравнение
![]()
5. Определение устойчивости
5.1 Определение запаса устойчивости и быстродействия по переходной характеристике
Для построения и анализа переходных процессов воспользуемся компьютерной программой Matlab 6.1.
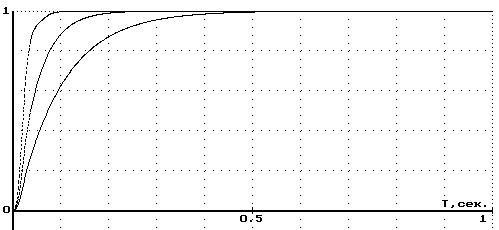
Оценку запаса устойчивости и быстродействия можно произвести по виду кривой переходного процесса в системе автоматического регулирования при некотором типовом входном воздействии. В качестве типового входного воздействия рассматривается обычно единичный скачок. В данном случае кривая переходного процесса для регулируемой величины будет представлять собой переходную характеристику системы (рисунок 12).
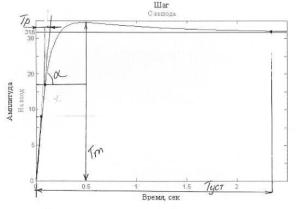
Рисунок 12 - Переходная характеристика системы
Анализ построенной кривой переходного процесса показывает, что система стабилизируется на уровне Ру = 31,6 при подаче на вход единичного ступенчатого сигнала. Склонность системы к колебаниям, а, следовательно, и запас устойчивости могут быть охарактеризованы максимальным значением регулируемой величины умах или так называемым перерегулированием:

Допустимое значение перерегулирования для той или иной системы автоматического регулирования может быть установлено на основании опыта эксплуатации подобных систем. В данном случае считается, что запас устойчивости, является достаточным, если величина перерегулирования не превышает 10÷30%.
5.2 Определение устойчивости по логарифмическим частотным характеристикам
Критической точке, где модуль амплитудно-фазовой характеристики равен единице, соответствует точка пересечения ЛАЧХ с осью абсцисс на частоте среза ωз, а точке, в которой фазовый сдвиг равен 180°, соответствует пересечению ЛАЧХ линии –π. Замкнутая система устойчива, если на частоте со, для которой φ = -π, ордината ЛАЧХ отрицательна.
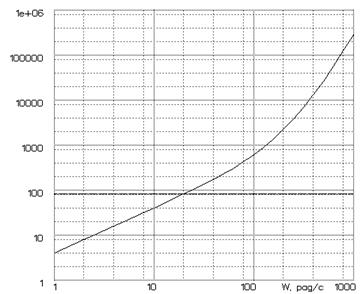
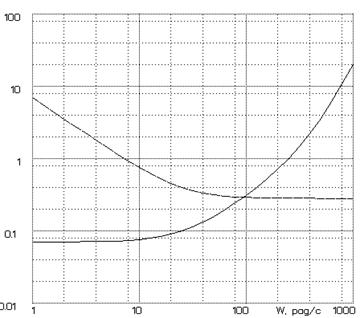
На рисунке 13 приведены логарифмические частотные характеристики, по которым определим устойчивость и запас устойчивости системы. Запас устойчивости по амплитуде L3 есть число децибел, на которое нужно увеличить коэффициент усиления на частоте, соответствующий фазовому сдвигу φ=-π, чтобы система потеряла устойчивость. Для удовлетворительного качества регулирования должны выполняться условия:
L3≥(10÷20)дб, (6.18)
φ3>(30÷60)°. (6.19)
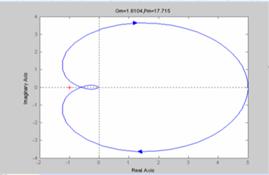
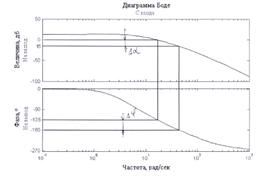
Рисунок 13 - Логарифмическая частотная характеристика по амплитуде 15-20 Дб, по фазе 30-60о
Анализируя полученные характеристики, видим, что точка ωср находится в области отрицательных значений, а запас устойчивости по амплитуде Lз=15 Дб удовлетворяет условию (6.18).
Запас устойчивости φз= 45° удовлетворяет условию (6.19).
Вывод
Работа в курсовом проекте велась по трем направлениям, выполняемых последовательно:
Произвели анализ системы автоматического управления.
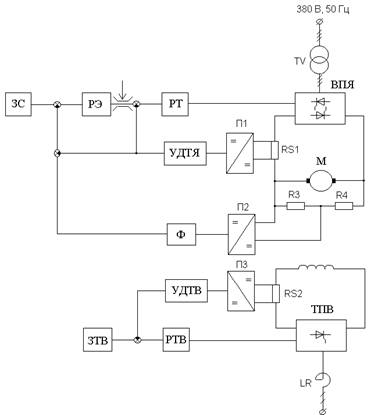
В системе регулирование ведется по двум координатам ЭП — скорости и тока. Замкнутая структура ЭП выполняется по схеме с подчиненным регулированием координат. Регулирование каждой координаты осуществляется собственными регуляторами, которые вместе с соответствующими обратными связями образуют замкнутые контуры. Таким образом, внутренний контур тока подчинен внешнему контуру скорости - основной регулируемой координате.
Расчет и выбор элементов силовой части. Синтез САУ, включающий расчет передаточных функций.
В соответствии с заданием произвели расчет и выбор элементов силовой части системы: двигатель типа 2ПА, тиристорный преобразователь типа ТПР, силовой трансформатор ТСЗ, система импульсно - фазового управления, реактор типа РТСТ. Для каждого элемента рассчитали передаточную функцию и составили структурную схему.
Построение и анализ переходных процессов.
Проанализировав систему по переходной характеристике, определили время переходного процесса, перерегулирование и быстродействие. По критерию Найквиста, ЛАЧХ и ЛФЧХ система является устойчивой и имеет запас устойчивости.
По полученным результатам можно сказать, что система спроектирована так, чтобы она имела максимальную точность выполнения возложенной на нее задачи регулирования заданного объекта. Основой является оптимизация закона регулирования, то есть наилучшее построение регулятора (системы управления) для осуществления заданной программы управления.
Но следует учитывать, что отличие оптимальной системы состоит в том, чтобы добиться не просто требуемых показателей, а наилучших показателей, то есть «извлечь» из системы все, что она может дать по определенному виду качества, наиболее важному для этой системы, при соблюдении заданных требований по всем другим ее свойствам.
Литература
1. Биссикерский и Попов, «Теория систем автоматического управления», 2004.
2. Тюков Н.И. и Грачева Л.Н. «Учебное пособие по ТАУ».
3. Тюков Н.И. и Грачева Л.Н. «Учебное пособие по курсовому проекту».
4. Густар и Ольсон, «Цифровые системы автоматизации и управления».
5. Ковчин и Соберин, «Теория электропривода».
6. “Теория автоматического управления”. Под редакцией
Ю.М. Соломенцева. Москва “Высшая школа”1999.
7. “Теория автоматического управления”. Воронов.
Похожие работы

... имеют крутой передний фронт 2-5 мс, и малую длительность 10-15 градусов. Исходя из выше изложенных технических требований предъявляемых к системе управления, в проекте в качестве электропривода выбирается электропривод постоянного тока с тиристорным преобразователем, обеспечивающим регулирование напряжения на якоре двигателя. В соответствии с технологическими условиями производства система ...
... контура регулирования контур регулирования скорости двигателя. 4. Выбор комплектного тиристорного электропривода На основании выбранного электродвигателя произведем выбор промышленного комплектного тиристорного электропривода постоянного тока серии КТЭУ. Выбираем тиристорный электропривод КТЭУ 500/220-532-1ВМТД-УХЛ4. 800- Номинальный выходной ток 220- Номинальное выходное напряжение. 5- ...
... частоты на IGBT транзисторах, для частотно-регулируемого энергосберегающего электропривода с асинхронным приводом. Нагрузкой асинхронного двигателя служит центробежный насос для перекачки жидкости. Глава 1. Расчет управляемого выпрямителя для электродвигателя постоянного тока тиристорного электропривода 1.1 Выбор рациональной схемы управляемого выпрямителя и силовая часть электропривода ...
ерсивного тиристорного электропривода постоянного тока с обратной связью по ЭДС и стабилизацией тока возбуждения двигателя. Данный электропривод постоянного тока разрабатывается на основе комплектного тиристорного электропривода ЭПУ. Применение тиристорного электропривода позволяет оптимизировать его работу на отработку необходимых технологических операций. В данной курсовой работе необходимо ...
0 комментариев