Навигация
Автоматическое управление системами автомобиля
7472
знака
4
таблицы
5
изображений
Министерство образования и науки Украины




Севастопольский национальный технический университет
Кафедра Автомобильного транспорта
КОНТРОЛЬНАЯ РАБОТА
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ СИСТЕМАМИ АВТОМОБИЛЯ
специальности 07.09.0258 «Автомобили и автомобильное хозяйство»Выполнил: ст. гр. АВ-51з Калашников
Проверил: доц. Долгин. В.П.
Севастополь 2010ЗАДАНИЕ
Для подвески автомобиля указанной модели (выбрать в соответствии с вариантом)
1. построить переходную h(t) (исследование подвески во временной области) и
2. частотные характеристики (исследование подвески в частотной области) A(w), F(w), Jm(w), Re(w), Jm(Re(w)) в диапазоне частот от Wmin=Wr/10 рад/с до Wmax=Wr*10 рад/с.
ЧАСТОТНЫЕ И ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ
ПОДВЕСКИ АВТОМОБИЛЯ МОДЕЛИ
Ст. гр. АВ-51з Калашников
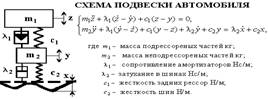
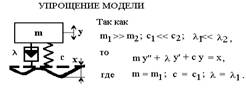
Рисунок 1.1 – Кинематические схемы подвески автомобиля
Обозначения:
W - передаточная функция,
R(w)- вещественная частотная характеристика,
M(w)- мнимая частотная характеристика,
A(w)- амплитудная частотная характеристика,
F(w)- фазовая частотная характеристика,
ПАРАМЕТРЫ ПЕРЕДАТОЧНОЙ ФУНКЦИИ
W = b0/(a0+a1*p+a2*p^2);
a0 = c:a1:=L:a2:=m:b0:=c:
Yu = x*limit(W,p=0);
ПАРАМЕТРЫ ПОДВЕСКИ
Ma– 10185 Масса автомобиля
Mg–5000Грузоподъемность
Kz– 0 Коэффициент загрузки
Dh– 0.1 Осадка под нагрузкой
xi– 0,5 Коэффициент демпфирования (комфортности, xi=0,3..0,8)
m = (Ma+Mg*Kz)/4;
c = evalf(Mg*9.81/Dh)/4;
L = 2*xi*c*sqrt(m/c);
ПЕРЕХОДНЫЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТАРНЫХ ЗВЕНЬЕВ
При вычислениях переходной характеристики звена операторным методом необходимо выполнить следующие действия.
Получить изображение X(p) по Лапласу входного сигнала X(t) в соответствии с определением
X(p) => L{ X(t) },
что в терминах математического пакета MAPLE with(inttrans) имеет вид
Lx:=laplace(X,t,p); (Lx = X(p), X = X(t)).
Найти изображение выходного сигнала Y(p) => X(p)* W(p).
Перейти от изображения по Лапласу выходного сигнала Y(p) к оригиналу Y(t) в соответствии с определением
Y(t) => L-1{ Y(p) },
что в терминах математического пакета MAPLE with(inttrans) имеет вид
Px:=invlaplace(Lx*W,p,t); (Px = X(t), W = W(p)).
Таблица – Переходные характеристики
| Аналитическое решение | ||
| Тип звена | Передаточная функция | Переходная характеристика [1, с.92],[2, c. 296] |
| Коебательное ξ < 1 |
|
|
| Апериодическое, ξ ≥ 1 |
|
|
 .
. .
.РЕШЕНИЕ
Похожие работы
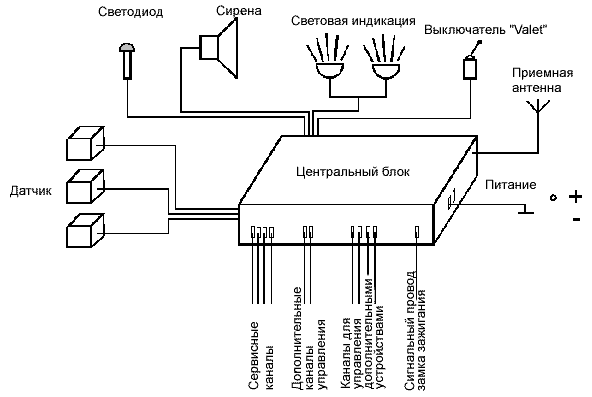
... полностью выключена и автомобиль в таком состоянии можно отдавать в сервис, сняв со связки ключей все брелки. Вам не придется обучать слесаря, которого вы видите в первый раз, всем премудростям охранной системы автомобиля. Зачем ему это! Таким образом, никто кроме вас не будет знать где и какие охранные системы установлены на вашем автомобиле. Другой функцией выключателя «Valet» является то, что ...
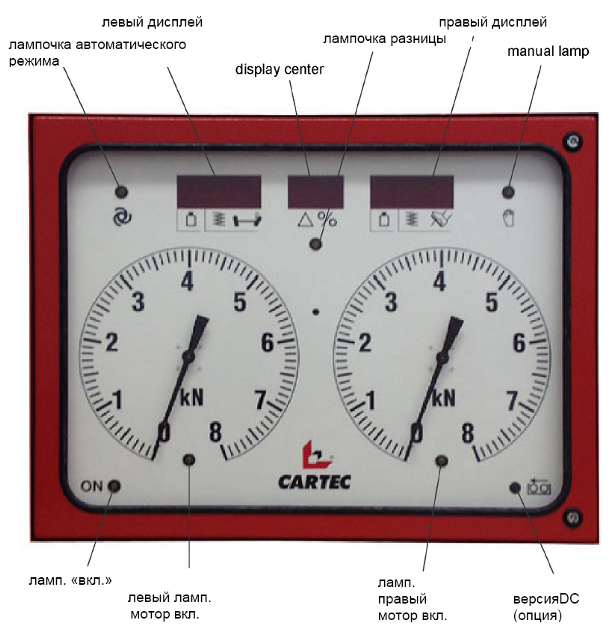
... для этой цели металлических ящиков с крышками; – применять самодельные нагревательные электроприборы. Заключение В дипломной работе описана тема: “Определение неисправностей тормозной системы автомобиля с помощью стенда диагностики тормозной системы”. В этой работе рассказано об устройстве и работе стенда, о возможных неисправностях и ремонте отдельных узлов тормозной системы. Выполнив ...
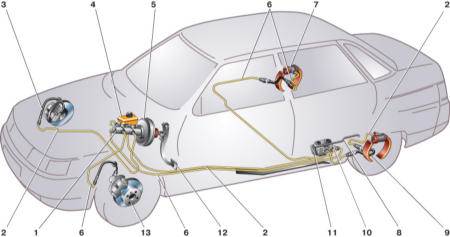
... эффективности (минимального тормозного пути) при сохранении устойчивости и управляемости автомобиля. Поэтому в данном дипломном проекте предлагается применить АБС в тормозной системе многоцелевого армейского автомобиля с пневматическим приводом. Основной задачей АБС является поддерживание в процессе торможения относительного скольжения колес в узких пределах. В этом случае обеспечиваются ...
... —к «массе». Качество отработки элементов вождения по трудным грунтам зависит от наличия и состояния цепей противоскольжения, трековых дорожек, матов и средств самовытаскивания 4. РАЗРАБОТКА КОНСТРУКЦИИ ДУБЛИРУЮЩЕГО УСТРОЙСТВА УПРАВЛЕНИЯ 4.1. ОПРЕДЕЛЕНИЕ РАСЧЕТНОЙ НАГРУЗКИ НА ВАЛ, ВОЗВРАТНЫЕ ПРУЖИНЫ И ПЕДАЛИ. Номинальное усилие на дополнительные педали тормоза и сцепления будет находиться в ...
0 комментариев