Навигация
Необхідні умови оптимальності. Принцип максимуму Понтрягіна
7657
знаков
0
таблиц
3
изображения
НЕОБХІДНІ УМОВИ ОПТИМАЛЬНОСТІ. ПРИНЦИП МАКСИМУМУ ПОНТРЯГІНА
1 Загальна задача керованості
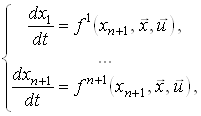
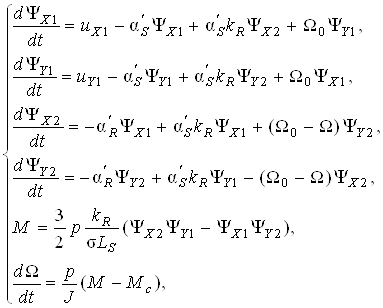
Розглянемо керований об'єкт, що описується системою рівнянь
![]() ,(1)
,(1)
де ![]() – вектор фазового стану об'єкта;
– вектор фазового стану об'єкта; ![]() – вектор керування.
– вектор керування.
Припустимо, задані початкова й кінцева множини ![]() та
та ![]() . Задача керованості полягає у встановленні наступного факту: чи існує на деякому відрізку часу
. Задача керованості полягає у встановленні наступного факту: чи існує на деякому відрізку часу ![]() хоча б одне таке припустиме керування
хоча б одне таке припустиме керування ![]() , що відповідний йому розв’язок
, що відповідний йому розв’язок ![]() рівняння (1) задовольняє граничним умовам
рівняння (1) задовольняє граничним умовам
![]() ,
, ![]() .(2)
.(2)
Визначення. Об'єкт є керованим на відрізку часу ![]() із множини
із множини ![]() на множину
на множину ![]() , якщо існує хоча б одне припустиме керування
, якщо існує хоча б одне припустиме керування ![]() таке, що відповідний йому розв’язок
таке, що відповідний йому розв’язок ![]() задовольняє граничним умовам (2), тобто здійснює перехід з початкової множини
задовольняє граничним умовам (2), тобто здійснює перехід з початкової множини ![]() на кінцеву множину
на кінцеву множину ![]() на відрізку часу
на відрізку часу ![]() .
.
Якщо питання про існування оптимального керування вирішено, далі необхідно його знайти (для цього використовуються необхідні умови оптимальності), а потім вибирати оптимальне керування на множині всіх керувань, що задовольняють цим необхідним умовам. Необхідні умови оптимальності, які дозволяють виділити із множини припустимих процесів деяку підмножину процесів, підозрілих на оптимальність, дає принцип максимуму Понтрягіна.
2 Властивості оптимальних керувань
Розглянемо керовану систему із законом (1) за заданих крайових умов
![]() ,
, ![]() ,(3)
,(3)
у якій фазовий вектор ![]() набуває будь-яких значень із простору
набуває будь-яких значень із простору ![]() , тобто фазові обмеження відсутні. Вважатимемо також, що на вектор керування
, тобто фазові обмеження відсутні. Вважатимемо також, що на вектор керування ![]() накладаються обмеження:
накладаються обмеження:
![]() ,
, ![]() ,
, ![]() ,(4)
,(4)
де ![]() – вектор-функція, неперервна по всіх змінних і неперервно-диференційована по змінних
– вектор-функція, неперервна по всіх змінних і неперервно-диференційована по змінних ![]() ;
;
![]() – лінійний простір кусково-неперервних на
– лінійний простір кусково-неперервних на ![]() функцій.
функцій.
Необхідно знайти таке припустиме керування ![]() , що переводить систему з фазового стану
, що переводить систему з фазового стану ![]() у фазовий стан
у фазовий стан ![]() , причому відповідний припустимий процес
, причому відповідний припустимий процес ![]() надає мінімального значення функціоналу
надає мінімального значення функціоналу
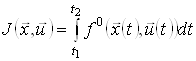 ,(5)
,(5)
де функція ![]() неперервна за сукупністю усіх змінних і неперервно-диференційована по змінних
неперервна за сукупністю усіх змінних і неперервно-диференційована по змінних ![]() .
.
Вважатимемо, що час керування ![]() – довільний, тобто кожному припустимому процесу, на якому система переходить зі стану
– довільний, тобто кожному припустимому процесу, на якому система переходить зі стану ![]() у стан
у стан ![]() , відповідають свої моменти часу
, відповідають свої моменти часу ![]() й
й ![]() .
.
Мають місце наступні властивості оптимальних керувань і траєкторій задачі (1), (3)–(5).
1. Властивості керувань не змінюються при зміщенні уздовж осі ![]() . Отже, якщо керування
. Отже, якщо керування ![]() ,
, ![]() , переводить систему зі стану
, переводить систему зі стану ![]() у стан
у стан ![]() , а цільовий функціонал на відповідному припустимому процесі приймає значення
, а цільовий функціонал на відповідному припустимому процесі приймає значення ![]() , то для кожного
, то для кожного ![]() керування
керування ![]() ,
, ![]() також переводить систему зі стану
також переводить систему зі стану ![]() в стан
в стан ![]() і цільовий функціонал при цьому набуває значення
і цільовий функціонал при цьому набуває значення ![]() (рис. 1).
(рис. 1).
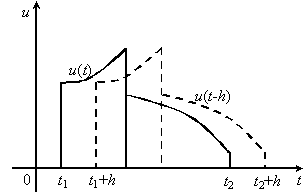
Рисунок 1
Позначимо ![]() , …,
, …, ![]() – скінченний набір точок фазового простору, для яких існує набір таких керувань
– скінченний набір точок фазового простору, для яких існує набір таких керувань ![]() , …,
, …, ![]() , що керування
, що керування ![]() переводить систему зі стану
переводить систему зі стану ![]() у стан
у стан ![]() і при цьому цільовий функціонал дорівнює
і при цьому цільовий функціонал дорівнює ![]() ,
, ![]() (рис. 2).
(рис. 2).
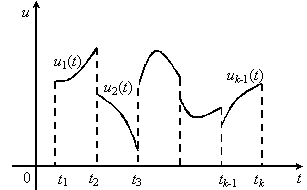
Рисунок 2
Тоді існує кусково-неперервне керування ![]() , яке переводить систему зі стану
, яке переводить систему зі стану ![]() у стан
у стан ![]() і значення цільового функціоналу при цьому дорівнює
і значення цільового функціоналу при цьому дорівнює
 .
.
Зауважимо, що подібна операція неможлива в класі неперервних керувань, тому що в точках стику ![]() побудоване узагальнене керування може мати точки розриву першого роду.
побудоване узагальнене керування може мати точки розриву першого роду.
3. Якщо функція ![]() ,
, ![]() – оптимальне керування, то фрагмент цієї функції на будь-якому інтервалі
– оптимальне керування, то фрагмент цієї функції на будь-якому інтервалі ![]() ,
, ![]() , також є оптимальним керуванням.
, також є оптимальним керуванням.
4. Припустимо, ![]() – оптимальна траєкторія, що відповідає керуванню
– оптимальна траєкторія, що відповідає керуванню ![]() ,
, ![]() ,
, ![]() . Розглянемо довільний відрізок
. Розглянемо довільний відрізок ![]() , і позначимо
, і позначимо ![]() ,
, ![]() . За таких умов інтеграл
. За таких умов інтеграл 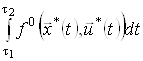 на керуванні
на керуванні ![]() набуває найменшого значення серед всіх припустимих керувань
набуває найменшого значення серед всіх припустимих керувань ![]() , що переводять систему зі стану
, що переводять систему зі стану ![]() в стан
в стан ![]() .
.
Похожие работы
... (14) є дійсними, то для будь-якого розв’язання рівняння (18) кожна з функцій є кусково сталою і має не більше ніж перемикань ( – порядок системи (16)). Керування називається екстремальним керуванням, якщо воно задовольняє принципу максимуму. Для лінійної задачі оптимальної швидкодії з областю керування – багатогранником керування є екстремальним, якщо існує таке нетривіальне розв’язання ...
... з рухомими кінцями необхідно визначити керування, що переводить об'єкт із деякого заздалегідь невідомого стану в деякий стан , де множини , відомі. Якщо і вироджуються в точки, то задача оптимального керування стає задачею із фіксованими кінцями. Якщо час і початкових і кінцевих крайових умов і відомий, то задача оптимального керування називається задачею з фіксованим часом. Якщо ж неві ...
... випадків, аварій, а з цим і простоїв на підприємстві, укріпити та створити культуру трудової діяльності. Виконання та розробка дипломного проекту “ Розробка дослідження системи керування електроприводом змінного струму дизель-потягу з використанням нейронних мереж ” відбувається за допомогою комп'ютера, тому питання охорони праці розглядаються щодо забезпечення здорових і безпечних умов роботи ...
... онала, що характеризує перехід системи в кінцевий стан зі стану , то в задачі оптимальної швидкодії ця функція показує оптимальний час переходу зі стану у фіксований стан . 7 Зв'язок методу динамічного програмування із принципом максимуму Розглянемо задачу оптимального керування з фіксованими кінцями та вільним часом (6) з цільовим функціоналом , і крайовими умовами , . Вважатимемо, що час ...
0 комментариев