Навигация
Принцип максимуму Понтрягіна
7657
знаков
0
таблиц
3
изображения
3 Принцип максимуму Понтрягіна
Розглянемо задачу оптимального керування (1), (3)–(5):
 ,
, ![]() ,
, ![]() ,
,
![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
де ![]() ,
, ![]() – функції, неперервні за сукупністю всіх змінних і неперервно-диференційовані по змінних
– функції, неперервні за сукупністю всіх змінних і неперервно-диференційовані по змінних ![]() .
.
Перейдемо до ![]() -вимірного простору, елементами якого є вектори
-вимірного простору, елементами якого є вектори
![]() ,
,
де ![]() – фазовий вектор задачі, а
– фазовий вектор задачі, а ![]() – деяка функція, що задовольняє співвідношенню
– деяка функція, що задовольняє співвідношенню
 .(6)
.(6)
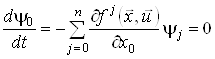
З останньої формули випливає, що функція ![]() є розв’язком рівняння
є розв’язком рівняння
![]() .
.
Приєднавши останнє рівняння до системи (1), дістанемо нову систему
 ,(7)
,(7)
де ![]() ;
;
![]() .
.
Підкреслимо, що праві частини рівнянь системи (7) не залежать від ![]() . З формули (6) випливає, що
. З формули (6) випливає, що
 ,
,  .
.
Таким чином, початкову задачу зведено до задачі вибору припустимого керування ![]() , яке здійснює перехід точки
, яке здійснює перехід точки ![]() в
в ![]() -вимірному просторі зі стану
-вимірному просторі зі стану ![]() у найближчу точку
у найближчу точку ![]() на прямій, що паралельна осі
на прямій, що паралельна осі ![]() , і проходить через точку
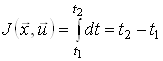
, і проходить через точку ![]() (рис. 3). Пошук оптимального керування тепер полягає в мінімізації величини
(рис. 3). Пошук оптимального керування тепер полягає в мінімізації величини ![]() . Дійсно,
. Дійсно,
 .
.
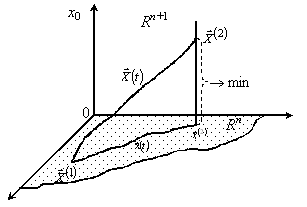
Рисунок 3
Складемо допоміжну систему
 ,
, ![]() ,(8)
,(8)
відносно невідомих функцій ![]() . Ця система називається спряженою системою до системи (7), а змінні
. Ця система називається спряженою системою до системи (7), а змінні ![]() – спряженими змінними.
– спряженими змінними.
Якщо ![]() – припустимий процес, то відповідна цьому процесу система (8) є лінійною однорідною системою диференціальних рівнянь із відомими кусково-неперервними коефіцієнтами. Відомо, що за будь-яких початкових умов ця система має єдиний розв’язок.
– припустимий процес, то відповідна цьому процесу система (8) є лінійною однорідною системою диференціальних рівнянь із відомими кусково-неперервними коефіцієнтами. Відомо, що за будь-яких початкових умов ця система має єдиний розв’язок.
Оскільки ![]() ,
, ![]() , не залежать від
, не залежать від ![]() , то
, то
 ,
,
і перше рівняння системи (8) можна спростити: ![]() , звідки випливає, що
, звідки випливає, що ![]() .
.
Розглянемо функцію
 ,(9)
,(9)
що називається функцією Понтрягіна, де ![]() – вектор спряжених змінних. Точну верхню грань значень цієї функції по змінній
– вектор спряжених змінних. Точну верхню грань значень цієї функції по змінній ![]() при фіксованих
при фіксованих ![]() і
і ![]() позначимо через
позначимо через
![]() .
.
Має місце наступна теорема.
Теорема 1 (принцип максимуму). Якщо керування ![]() ,
, ![]() і відповідна йому фазова траєкторія
і відповідна йому фазова траєкторія ![]() оптимальні, то існує така ненульова вектор-функція
оптимальні, то існує така ненульова вектор-функція ![]() , що відповідає функціям
, що відповідає функціям ![]() і
і ![]() (тобто задовольняє спряженій системі (8) з функціями
(тобто задовольняє спряженій системі (8) з функціями ![]() й
й ![]() ), що:
), що:
1. Функція ![]() від змінної
від змінної ![]() набуває максимуму в точці
набуває максимуму в точці ![]() для будь-якого
для будь-якого ![]() :
:
![]() :
: ![]() .
.
У кінцевий момент часу ![]() має місце співвідношення
має місце співвідношення ![]() ,
, ![]() .
.
Умови теореми 1 дозволяють серед усіх траєкторій, що проходять через дві задані точки ![]() й
й ![]() , виділити окремі траєкторії, серед яких перебуває і оптимальна траєкторія, якщо вона існує. Ці умови є необхідними, але не достатніми. Потрібна подальша перевірка знайдених траєкторій на оптимальність. Тільки в найпростішому випадку, коли знайдено лише одну траєкторію, а з деяких міркувань відомо, що оптимальний розв’язок існує, можна стверджувати, що знайдена траєкторія і є оптимальною.
, виділити окремі траєкторії, серед яких перебуває і оптимальна траєкторія, якщо вона існує. Ці умови є необхідними, але не достатніми. Потрібна подальша перевірка знайдених траєкторій на оптимальність. Тільки в найпростішому випадку, коли знайдено лише одну траєкторію, а з деяких міркувань відомо, що оптимальний розв’язок існує, можна стверджувати, що знайдена траєкторія і є оптимальною.
Якщо принципу максимуму задовольняють кілька траєкторій, то для виявлення серед них оптимальної треба застосовувати додаткові умови. Іноді вдається відокремити сторонні траєкторії, порівнюючи значення цільового функціонала. Але оптимальна траєкторія може бути не єдиною, а відкинуті траєкторії, не будучи оптимальними, можуть виявитися локально оптимальними.
Продиференціюємо функцію Понтрягіна (9) за змінними ![]() і
і ![]() :
:
 ,
, ![]() ,
,
 ,
, ![]() .
.
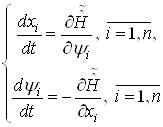
Тепер співвідношення (7) і (8) можна переписати у вигляді гамільтонової системи:
 .(10)
.(10)
Якщо ![]() ,
, ![]() ,
, ![]() задовольняють системі (10) і умові 1 теореми 1, то функції
задовольняють системі (10) і умові 1 теореми 1, то функції ![]() і
і ![]() змінного
змінного ![]() є сталими. Умова 2 теореми 1, таким чином, має місце в будь-який момент часу
є сталими. Умова 2 теореми 1, таким чином, має місце в будь-який момент часу ![]() .
.
4 Принцип максимуму для задачі оптимальної швидкодії
Окремим випадком критерію (5) є критерій
 ,(11)
,(11)
який називається критерієм оптимальної швидкодії, а відповідна йому задача – задачею оптимальної швидкодії. Оскільки у формулі (11) ![]() , то функція Понтрягіна
, то функція Понтрягіна ![]() для задачі оптимальної швидкодії матиме вигляд:
для задачі оптимальної швидкодії матиме вигляд:
 ,
,
де ![]() .
.
Оскільки перший доданок не залежить від ![]() , то максимум функції
, то максимум функції ![]() по
по ![]() реалізується одночасно з максимумом функції
реалізується одночасно з максимумом функції
 ,
,
де ![]() . Тому далі розглядатимемо нову гамільтонову систему, відкинувши перші рівняння системи (10), що відповідають
. Тому далі розглядатимемо нову гамільтонову систему, відкинувши перші рівняння системи (10), що відповідають ![]() :
:
 .(12)
.(12)
Позначимо
![]() .
.
Можна довести, що
![]() .
.
З теореми 1 відповідно до умов ![]() і
і ![]() , випливає, що:
, випливає, що:
1) ![]() ;
;
2) вектор-функції ![]() і
і ![]() не обертаються в нуль у жодній точці відрізка
не обертаються в нуль у жодній точці відрізка ![]() .
.
На основі теореми 1 можна сформулювати необхідні умови оптимальності в задачі швидкодії.
Теорема 2. Якщо ![]() ,
, ![]() – оптимальний процес, то існує ненульовий частинний розв’язок
– оптимальний процес, то існує ненульовий частинний розв’язок ![]() спряженої системи
спряженої системи
 ,
, ![]() ,
,
такий, що:
1. при кожному значенні ![]() функція
функція ![]() змінної
змінної ![]() набуває при
набуває при ![]() максимального значення:
максимального значення:
![]() ;
;
у кінцевий момент часу ![]() має місце співвідношення
має місце співвідношення ![]() .
.
Як і у випадку теореми 1, перевірку умови 2 теореми 2 можна проводити в будь-який момент часу ![]() .
.
Похожие работы
... (14) є дійсними, то для будь-якого розв’язання рівняння (18) кожна з функцій є кусково сталою і має не більше ніж перемикань ( – порядок системи (16)). Керування називається екстремальним керуванням, якщо воно задовольняє принципу максимуму. Для лінійної задачі оптимальної швидкодії з областю керування – багатогранником керування є екстремальним, якщо існує таке нетривіальне розв’язання ...
... з рухомими кінцями необхідно визначити керування, що переводить об'єкт із деякого заздалегідь невідомого стану в деякий стан , де множини , відомі. Якщо і вироджуються в точки, то задача оптимального керування стає задачею із фіксованими кінцями. Якщо час і початкових і кінцевих крайових умов і відомий, то задача оптимального керування називається задачею з фіксованим часом. Якщо ж неві ...
... випадків, аварій, а з цим і простоїв на підприємстві, укріпити та створити культуру трудової діяльності. Виконання та розробка дипломного проекту “ Розробка дослідження системи керування електроприводом змінного струму дизель-потягу з використанням нейронних мереж ” відбувається за допомогою комп'ютера, тому питання охорони праці розглядаються щодо забезпечення здорових і безпечних умов роботи ...
... онала, що характеризує перехід системи в кінцевий стан зі стану , то в задачі оптимальної швидкодії ця функція показує оптимальний час переходу зі стану у фіксований стан . 7 Зв'язок методу динамічного програмування із принципом максимуму Розглянемо задачу оптимального керування з фіксованими кінцями та вільним часом (6) з цільовим функціоналом , і крайовими умовами , . Вважатимемо, що час ...
0 комментариев