Навигация
НЕГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
"ЭКОНОМИКО-КОМПЬЮТЕРНЫЙ ТЕХНИКУМ"
ГРАФИЧЕСКАЯ КУРСОВАЯ РАБОТА
по дисциплине: "Математические методы"
на тему: "Транспортная задача"
Выполнил:
студент 4-го курса группы 08-1 (п)
Лагутин Р.И.
Руководитель: Ходаковская Т.Ю.
Курск – 2010 г.
Задание
Цели работы: изучить методы решения транспортной задачи и их реализацию при решении практической задачи.
Задания:
1. Рассмотреть понятие транспортной задачи, ее типы.
2. Рассмотреть различные методы решения транспортной задачи.
3. Построить первый опорный план данной транспортной задачи двумя различными методами.
4. Найти оптимальный план перевозок данной задачи методом потенциалов.
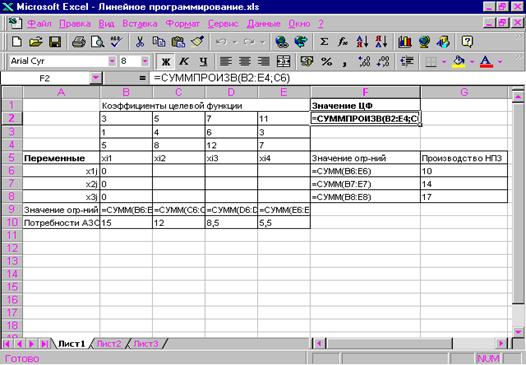
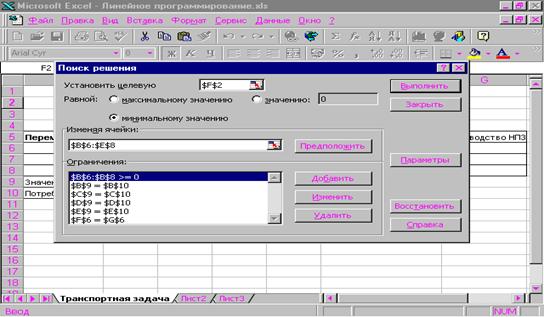
5. Решить данную задачу с использованием MS Excel (привести описание решения).
6. Составьте компьютерную программу по решению задач данного типа (привести описание программы, приложить программу в электронном виде).
Вариант 4.1.
На четырех складах фирмы находится 70, 30, 40 и 60 холодильников соответственно, которые следует доставить в четыре магазина фирмы в количестве 50, 70, 40 и 40 холодильников в каждый из магазинов. Стоимости перевозки одного холодильника с первого склада в каждый из магазинов составляют 6, 4, 9 и 7 денежных единиц соответственно, со второго склада - 7, 2, 5 и 6 денежных единиц, с третьего склада - 2, 6, 3 и 3 денежных единиц, с четвертого склада - 3, 3, 6 и 5 денежных единиц соответственно. Определить план перевозок холодильников со складов в магазины, при котором общие затраты на перевозку были бы наименьшими.
Оглавление
Задание
Введение
Транспортная задача
Математическая модель
Опорный план
Распределительный метод оптимального плана
Решение транспортной задачи методом потенциалов
Всякий потенциальный план является оптимальным
Заключение
Список используемой литературы
Введение
Каждый человек ежедневно, не всегда осознавая это, решает проблему: как получить наибольший эффект, обладая ограниченными средствами. Наши средства и ресурсы всегда ограничены. Жизнь была бы менее интересной, если бы это было не так. Не трудно выиграть сражение, имея армию в 10 раз большую, чем у противника. Чтобы достичь наибольшего эффекта, имея ограниченные средства, надо составить план, или программу действий. Раньше план в таких случаях составлялся “на глазок”. В середине XX века был создан специальный математический аппарат, помогающий это делать “по науке”. Соответствующий раздел математики называется математическим программированием. Слово “программирование" здесь и в аналогичных терминах (“линейное программирование, динамическое программирование” и т.п.) обязано отчасти историческому недоразумению, отчасти неточному переводу с английского. По-русски лучше было бы употребить слово “планирование”. С программированием для ЭВМ математическое программирование имеет лишь то общее, что большинство возникающих на практике задач математического программирования слишком громоздки для ручного счета, решить их можно только с помощью ЭВМ, предварительно составив программу. Временем рождения линейного программирования принято считать 1939 г., когда была напечатана брошюра Леонида Витальевича Канторовича “Математические методы организации и планирования производства”.
Под названием “транспортная задача” объединяется широкий круг задач с единой математической моделью. Данные задачи относятся к задачам линейного программирования и могут быть решены симплексным методом. Однако матрица системы ограничений транспортной задачи настолько своеобразна, что для ее решения разработаны специальные методы. Эти методы, как и симплексный метод, позволяют найти начальное опорное решение, а затем, улучшая его, получить оптимальное решение.
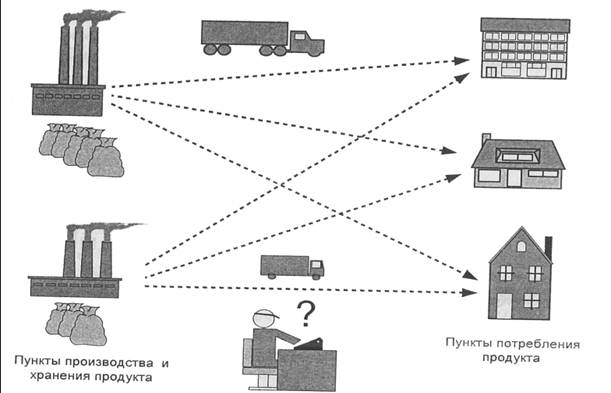
Целью транспортной задачи является обеспечение получения (доставки) продукции (товара) потребителю в нужное время и место при минимально возможных совокупных затратах трудовых, материальных, финансовых ресурсов.
Цель транспортной деятельности считается достигнутой при выполнении шести условий:
1. нужный товар;
2. необходимого качества;
3. в необходимом количестве доставлен;
4. в нужное время;
5. в нужное место;
6. с минимальными затратами.
Объектом изучения являются материальные и соответствующие им финансовые, информационные потоки, сопровождающие производственно-коммерческую деятельность.
В данной курсовой работе будут рассмотрены понятие транспортной задачи, ее типы, различные методы решения. Решена задача по заданию 4.1 с помощью MS Excel и приложена компьютерная программа по решению задачи данного типа.
Транспортная задача
Линейные транспортные задачи составляют особый класс задач линейного программирования. Задача заключается в отыскании такого плана перевозок продукции с m складов в пункт назначения n который, потребовал бы минимальных затрат. Если потребитель j получает единицу продукции (по прямой дороге) со склада i, то возникают издержки Сij. Предполагается, что транспортные расходы пропорциональны перевозимому количеству продукции, т.е. перевозка k единиц продукции вызывает расходы k С ij.
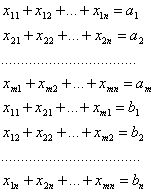
Далее,
![]()
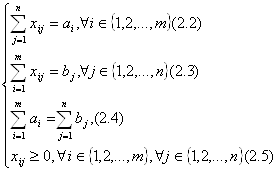
где ai есть количество продукции, находящееся на складе i , и bj - потребность потребителя j.
Замечание.
1. Если сумма запасов в пунктах отправления превышает сумму поданных заявок ![]() то количество продукции, равное
то количество продукции, равное ![]() остается на складах. В этом случае мы введем "фиктивного" потребителя n +1 с потребностью
остается на складах. В этом случае мы введем "фиктивного" потребителя n +1 с потребностью ![]() и положим транспортные расходы pi,n +1 равными 0 для всех i.
и положим транспортные расходы pi,n +1 равными 0 для всех i.
2. Если сумма поданных заявок превышает наличные запасы ![]() то потребность не может быть покрыта. Эту задачу можно свести к обычной транспортной задаче с правильным балансом, если ввести фиктивный пункт отправления m + 1 с запасом
то потребность не может быть покрыта. Эту задачу можно свести к обычной транспортной задаче с правильным балансом, если ввести фиктивный пункт отправления m + 1 с запасом ![]() и стоимость перевозок из фиктивного пункта отправления во все пункты назначения принять равным нулю.
и стоимость перевозок из фиктивного пункта отправления во все пункты назначения принять равным нулю.
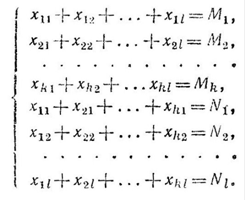
Математическая модель
![]()
![]()
![]()
![]()
![]()
где xij количество продукции, поставляемое со склада i потребителю j, а С ij издержки (стоимость перевозок со склада i потребителю j).
Опорный план
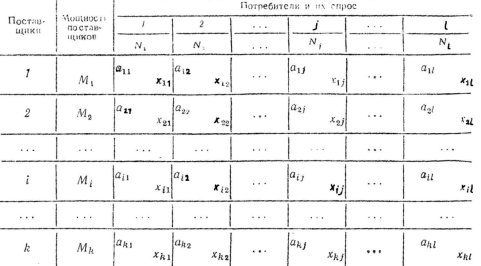
Решение транспортной задачи начинается с нахождения опорного плана. Для этого существуют различные способы. Например, способ северо-западного угла, способ минимальной стоимости по строке, способ минимальной стоимости по столбцу и способ минимальной стоимости таблицы. Рассмотрим простейший, так называемый способ северо-западного угла. Пояснить его проще всего будет на конкретном примере:
Условия транспортной задачи заданы транспортной таблицей.
Таблица № 1
| ПН ПО | В1 | В2 | В3 | В4 | В5 | Запасы аi |
| А1 | 10 | 8 | 5 | 6 | 9 | 48 |
| А2 | 6 | 7 | 8 | 6 | 5 | 30 |
| А3 | 8 | 7 | 10 | 8 | 7 | 27 |
| А4 | 7 | 5 | 4 | 6 | 8 | 20 |
| Заявки bj | 18 | 27 | 42 | 12 | 26 | 125 |
Будем заполнять таблицу перевозками постепенно начиная с левой верхней ячейки ("северо-западного угла" таблицы). Будем рассуждать при этом следующим образом. Пункт В1 подал заявку на 18 единиц груза. Удовлетворим эту заявку за счёт запаса 48, имеющегося в пункте А1, и запишем перевозку 18 в клетке (1,1). После этого заявка пункта В1 удовлетворена, а в пункте А1 осталось ещё 30 единиц груза. Удовлетворим за счёт них заявку пункта В2 (27 единиц), запишем 27 в клетке (1,2); оставшиеся 3 единицы пункта А1 назначим пункту В3. В составе заявки пункта В3 остались неудовлетворёнными 39 единиц. Из них 30 покроем за счёт пункта А2, чем его запас будет исчерпан, и ещё 9 возьмём из пункта А3. Из оставшихся 18 единиц пункта А3 12 выделим пункту В4; оставшиеся 6 единиц назначим пункту В5, что вместе со всеми 20 единицами пункта А4 покроет его заявку. На этом распределение запасов закончено; каждый пункт назначения получил груз, согласно своей заявки. Это выражается в том, что сумма перевозок в каждой строке равна соответствующему запасу, а в столбце - заявке.
Таким образом, нами сразу же составлен план перевозок, удовлетворяющий балансовым условиям. Полученное решение является опорным решением транспортной задачи:
Таблица № 2
| ПН ПО | В1 | В2 | В3 | В4 | В5 | Запасы аi |
| А1 | 10 18 | 8 27 | 5 3 | 6 | 9 | 48 |
| А2 | 6 | 7 | 8 30 | 6 | 5 | 30 |
| А3 | 8 | 7 | 10 9 | 8 12 | 7 6 | 27 |
| А4 | 7 | 5 | 4 | 6 | 8 20 | 20 |
| Заявки bj | 18 | 27 | 42 | 12 | 26 | 125 |
Составленный нами план перевозок, не является оптимальным по стоимости, так как при его построении мы совсем не учитывали стоимость перевозок Сij.
Другой способ - способ минимальной стоимости по строке - основан на том, что мы распределяем продукцию от пункта Ai не в любой из пунктов Bj, а в тот, к которому стоимость перевозки минимальна. Если в этом пункте заявка полностью удовлетворена, то мы убираем его из расчетов и находим минимальную стоимость перевозки из оставшихся пунктов Bj. Во всем остальном этот метод схож с методом северо-западного угла. В результате, опорный план, составленный способом минимальной стоимости по строке выглядит, так как показано в таблице № 3. При этом методе может получиться, что стоимости перевозок Cij и Cik от пункта Ai к пунктам Bj
и Bk равны. В этом случае, с экономической точки зрения, выгоднее распределить продукцию в тот пункт, в котором заявка больше. Так, например, в строке 2: C21 = C24, но заявка b1 больше заявки b4, поэтому 4 единицы продукции мы распределим в клетку (2,1).
Таблица № 3
| ПН ПО | В1 | В2 | В3 | В4 | В5 | Запасы аi |
| А1 | 10 | 8 | 5 42 | 6 6 | 9 | 48 |
| А2 | 6 4 | 7 | 8 | 6 | 5 26 | 30 |
| А3 | 8 | 7 27 | 10 | 8 | 7 0 | 27 |
| А4 | 7 14 | 5 | 4 | 6 6 | 8 | 20 |
| Заявки bj | 18 | 27 | 42 | 12 | 26 | 125 |
Способ минимальной стоимости по столбцу аналогичен предыдущему способу. Их отличие состоит в том, что во втором способе мы распределяем продукцию от пунктов Bi к пунктам Aj по минимальной стоимости Cji.
Опорный план, составленный способами минимальных стоимостей, обычно более близок к оптимальному решению. Так в нашем примере общие затраты на транспортировку по плану, составленному первым способом F0 = 1039, а по второму F0 = 723. Клетки таблицы, в которых стоят ненулевые перевозки, являются базисными. Их число должно равняться m + n - 1. Необходимо отметить также, что встречаются такие ситуации, когда количество базисных клеток меньше чем m + n - 1. В этом случае распределительная задача называется вырожденной. И следует в одной из свободных клеток поставить количество перевозок равное нулю. Так, например, в таблице № 3:
m + n - 1 = 4 + 5 - 1 = 8,
а базисных клеток 7, поэтому нужно в одну из клеток строки 3 или столбца 2 поставить значение “0”. Например в клетку (3,5). Составляя план по способам минимальных стоимостей в отличии от плана по способу северо-западного угла мы учитываем стоимости перевозок Cij, но все же не можем утверждать, что составленный нами план является оптимальным.
Распределительный метод оптимального плана
Теперь попробуем улучшить план, составленный способом северо-западного угла. Перенесем, например, 18 единиц из клетки (1,1) в клетку (2,1) и чтобы не нарушить баланса перенесём те же 18 единиц из клетки (2,3) в клетку (1,3). Получим новый план. Подсчитав стоимость опорного плана (она ровняется 1039) и стоимость нового плана (она ровняется 913) нетрудно убедиться, что стоимость нового плана на 126 единиц меньше. Таким образом, за счёт циклической перестановки 18 единиц груза из одних клеток в другие нам удалось понизить стоимость плана:
Таблица №4
| ПН ПО | В1 | В2 | В3 | В4 | В5 | Запасы аi |
| А1 | 10 | 8 27 | 5 21 | 6 | 9 | 48 |
| А2 | 6 18 | 7 | 8 12 | 6 | 5 | 30 |
| А3 | 8 | 7 | 10 9 | 8 12 | 7 6 | 27 |
| А4 | 7 | 5 | 4 | 6 | 8 20 | 20 |
| Заявки bj | 18 | 27 | 42 | 12 | 26 | 125 |
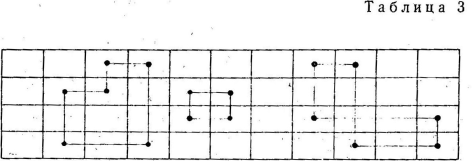
На этом способе уменьшения стоимости в дальнейшем и будет основан алгоритм оптимизации плана перевозок. Циклом в транспортной задаче мы будем называть несколько занятых клеток, соединённых замкнутой, ломанной линией, которая в каждой клетке совершает поворот на 90°. Существует несколько вариантов цикла:
1.) 2.) 3.)
|
| |||||
|
|
| ||||
Нетрудно убедиться, что каждый цикл имеет чётное число вершин и значит, чётное число звеньев (стрелок). Условимся отмечать знаком + те вершины цикла, в которых перевозки необходимо увеличить, а знаком - , те вершины, в которых перевозки необходимо уменьшить. Цикл с отмеченными вершинами будем называть означенным. Перенести какое-то количество единиц груза по означенному циклу, это значит увеличить перевозки, стоящие в положительных вершинах цикла, на это количество единиц, а перевозки, стоящие в отрицательных вершинах уменьшить на то же количество. Очевидно, при переносе любого числа единиц по циклу равновесие между запасами и заявками не меняется: по прежнему сумма перевозок в каждой строке равна запасам этой строки, а сумма перевозок в каждом столбце - заявке этого столбца. Таким образом, при любом циклическом переносе, оставляющем перевозки неотрицательными допустимый план остаётся допустимым.
Стоимость же плана при этом может меняться: увеличиваться или уменьшатся. Назовём ценой цикла увеличение стоимости перевозок при перемещении одной единицы груза по означенному циклу. Очевидно, цена цикла ровна алгебраической сумме стоимостей, стоящих в вершинах цикла, причём стоящие в положительных вершинах берутся со знаком +, а в отрицательных со знаком - . Обозначим цену цикла через g.
При перемещении одной единицы груза по циклу стоимость перевозок увеличивается на величину g. При перемещении по нему k единиц груза стоимость перевозок увеличиться на kg. Очевидно, для улучшения плана имеет смысл перемещать перевозки только по тем циклам, цена которых отрицательна. Каждый раз, когда нам удаётся совершить такое перемещение, стоимость плана уменьшается на соответствующую величину kg. Так как перевозки не могут быть отрицательными, мы будем пользоваться только такими циклами, отрицательные вершины которых лежат в базисных клетках таблицы, где стоят положительные перевозки.
Если циклов с отрицательной ценой в таблице больше не осталось, это означает, что дальнейшее улучшение плана невозможно, то есть оптимальный план достигнут. Метод последовательного улучшения плана перевозок и состоит в том, что в таблице отыскиваются циклы с отрицательной ценой, по ним перемещаются перевозки, и план улучшается до тех пор, пока циклов с отрицательной ценой уже не останется. При улучшении плана циклическими переносами, как правило, пользуются приёмом, заимствованным из симплекс-метода: при каждом шаге (цикле) заменяют одну свободную переменную на базисную, то есть заполняют одну свободную клетку и взамен того освобождают одну из базисных клеток. При этом общее число базисных клеток остаётся неизменным и равным m + n - 1. Этот метод удобен тем, что для него легче находить подходящие циклы. Можно доказать, что для любой свободной клетке транспортной таблице всегда существует цикл и притом единственный, одна из вершин которого лежит в этой свободной клетке, а все остальные в базисных клетках. Если цена такого цикла, с плюсом в свободной клетке, отрицательна, то план можно улучшить перемещением перевозок по данному циклу. Количество единиц груза k, которое можно переместить, определяется минимальным значением перевозок, стоящих в отрицательных вершинах цикла (если переместить большее число единиц груза, возникнут отрицательные перевозки).
Применённый выше метод отыскания оптимального решения транспортной задачи называется распределённым; он состоит в непосредственном отыскании свободных клеток с отрицательной ценой цикла и в перемещении перевозок по этому циклу.
Распределительный метод решения транспортной задачи, с которым мы познакомились, обладает одним недостатком: нужно отыскивать циклы для всех свободных клеток и находить их цены. От этой трудоёмкой работы нас избавляет специальный метод решения транспортной задачи, который называется методом потенциалов.
Решение транспортной задачи методом потенциалов
Этот метод позволяет автоматически выделять циклы с отрицательной ценой и определять их цены. Пусть имеется транспортная задача с балансовыми условиями
![]()
![]()
![]()
![]()
![]()
Стоимость перевозки единицы груза из Ai в Bj равна C ij; таблица стоимостей задана. Требуется найти план перевозок xij, который удовлетворялбы балансовым условиям и при этом стоимость всех перевозок быламинимальна.
Идея метода потенциалов для решения транспортной задачи сводиться к следующему. Представим себе что каждый из пунктов отправления Ai вносит за перевозку единицы груза (всё равно куда) какую-то сумму ai; в свою очередь каждый из пунктов назначения Bj также вносит за перевозку груза (куда угодно) сумму bj. Эти платежи передаются некоторому третьему лицу (“перевозчику“). Обозначим ai + bj = čij (i=1. m; j=1. n) и будем называть величину čij “псевдостоимостью" перевозки единицы груза из Ai в Bj. Заметим, что платежи ai и bj не обязательно должны быть положительными; не исключено, что “перевозчик" сам платит тому или другому пункту какую-то премию за перевозку.
Также надо отметить, что суммарная псевдостоимость любого допустимого плана перевозок при заданных платежах (ai и bj) одна и та же и от плана к плану не меняется. До сих пор мы никак не связывали платежи (ai и bj) и псевдостоимости čij с истинными стоимостями перевозок C ij. Теперь мы установим между ними связь. Предположим, что план xij невырожденный (число базисных клеток в таблице перевозок ровно m + n - 1). Для всех этих клеток xij >0. Определим платежи (ai и bj) так, чтобы во всех базисных клетках псевдостоимости были ровны стоимостям:
čij = ai + bj = сij, при xij >0.
Что касается свободных клеток (где xij = 0), то в них соотношение между псевдостоимостями и стоимостями может быть, какое угодно. Оказывается соотношение между псевдостоимостями и стоимостями в свободных клетках показывает, является ли план оптимальным или же он может быть улучшен. Существует специальная теорема: Если для всех базисных клеток плана xij > 0,ai + bj = čij= сij, а для всех свободных клеток xij =0,ai + bj = čij≤ сij, то план является оптимальным и никакими способами улучшен быть не может. Нетрудно показать, что это теорема справедлива также для вырожденного плана, и некоторые из базисных переменных равны нулю. План обладающий свойством:
čij= сij (для всех базисных клеток) (1)
čij≤ сij (для всех свободных клеток) (2)
называется потенциальным планом, а соответствующие ему платежи (ai и bj) - потенциалами пунктов Ai и Bj (i=1,.,m; j=1,.,n).
Пользуясь этой терминологией вышеупомянутую теорему можно сформулировать так:
Всякий потенциальный план является оптимальным
Итак, для решения транспортной задачи нам нужно одно - построить потенциальный план. Оказывается его можно построить методом последовательных приближений, задаваясь сначала какой-то произвольной системой платежей, удовлетворяющей условию (1). При этом в каждой базисной клетке получиться сумма платежей, равная стоимости перевозок в данной клетке; затем, улучшая план следует одновременно менять систему платежей. Так, что они приближаются к потенциалам. При улучшении плана нам помогает следующее свойство платежей и псевдостоимостей: какова бы ни была система платежей (ai и bj) удовлетворяющая условию (1), для каждой свободной клетки цена цикла пересчёта равна разности между стоимостью и псевдостоимостью в данной клетке: gi,j= сi,j - či,j.
Таким образом, при пользовании методом потенциалов для решения транспортной задачи отпадает наиболее трудоёмкий элемент распределительного метода: поиски циклов с отрицательной ценой.
Процедура построения потенциального (оптимального) плана состоит в следующем. В качестве первого приближения к оптимальному плану берётся любой допустимый план (например, построенный способом минимальной стоимости по строке). В этом плане m + n - 1 базисных клеток, где m - число строк, n - число столбцов транспортной таблицы. Для этого плана можно определить платежи (ai и bj), так, чтобы в каждой базисной клетке выполнялось условие: ai + bj = сij (3)
Уравнений всего m + n - 1, а число неизвестных равно m +n. Следовательно, одну из этих неизвестных можно задать произвольно (например, равной нулю). После этого из m + n - 1 уравнений можно найти остальные платежи ai, bj, а по ним вычислить псевдостоимости, či,j= ai + bj для каждой свободной клетки.
Таблица №5
| ПН / ПО | В1 | В2 | В3 | В4 | В5 | ai |
| А1 | 10 č = 7 | 8 č = 6 | 5 42 | 6 6 | 9 č = 6 | a1= 0 |
| А2 | 6 4 | 7 č = 5 | 8 č = 4 | 6 č = 5 | 5 26 | a2= - 1 |
| А3 | 8 č = 8 | 7 27 | 10 č = 6 | 8 č = 7 | 7 0 | a3= 1 |
| А4 | 7 14 | 5 č = 6 | 4 č = 5 | 6 6 | 8 č = 6 | a4= 0 |
| bj | b1= 7 | b2= 6 | b3= 5 | b4= 6 | b5= 6 |
a4 = 0, ®
b4 = 6, так как a4 + b4 = С44 = 6, ®
a1= 0, так как a1 + b4 = С14 = 6, ®
b3 = 5, так как a1 + b3 = С13 = 5, ®
b1 = 7, так как a4 + b1 = С41 = 7, ®
a2= - 1, так как a2 + b1 = С21 = 6, ®
b5 = 6, так как a2 + b5 = С25 = 5, ®
a3= 1, так как a3 + b5 = С35 = 7, ®
b2 = 6, так как a3 + b2 = С25 = 7.
Если оказалось, что все эти псевдостоимости не превосходят стоимостей čij £ сij, £ ³ то план потенциален и, значит, оптимален. Если же хотя бы в одной свободной клетке псевдостоимость больше стоимости (как в нашем примере), то план не является оптимальным и может быть улучшен переносом перевозок по циклу, соответствующему данной свободной клетке. Цена этого цикла ровна разности между стоимостью и псевдостоимостью в этой свободной клетке. В таблице № 5 мы получили в двух клетках čij ³ сij, теперь можно построить цикл в любой из этих двух клеток. Выгоднее всего строить цикл в той клетке, в которой разность čij - сij максимальна. В нашем случае в обоих клетках разность одинакова (равна 1), поэтому, для построения цикла выберем, например, клетку (4,2):
Таблица №6
| ПН ПО | В1 | В2 | В3 | В4 | В5 | ai |
| А1 | 10 | 8 | 5 42 | 6 6 | 9 | 0 |
| А2 | 6 + 4 | 7 | 8 | 6 | 5 - 26 | -1 |
| А3 | 8 | 7 - 27 | 10 | 8 | 7 + 0 | 1 |
| А4 | 7 - 14 | 5 + û | 4 | 6 6 | 8 | 0 |
| bj | 7 | 6 | 5 | 6 | 6 |
Теперь будем перемещать по циклу число 14, так как оно является минимальным из чисел, стоящих в клетках, помеченных знаком - . При перемещении мы будем вычитать 14 из клеток со знаком - и прибавлять к клеткам со знаком +. После этого необходимо подсчитать потенциалы ai и bj и цикл расчетов повторяется.
Итак, мы приходим к следующему алгоритму решения транспортной задачи методом потенциалов.
Похожие работы
... продукции второго вида. В этом случае предприятие получит прибыль денежных единиц. 2. Решить транспортную задачу распределительным методом, оценивая свободные клетки по методу потенциалов. 60 50 85 75 65 8 10 6 5 65 80 4 30 3 50 5 9 35 11 25 4 4 8 10 90 5 5 5 3 85 6 Проверим необходимое ...
... . При этом значения cij соответствуют коэффициентам целевой функции исходной замкнутой транспортной задачи (1) и в последующем не изменяются. Элементы xij соответствуют значениям переменных промежуточных решений транспортной задачи линейного программирования и изменяются на каждой итерации алгоритма. Если в некоторой ячейке xij=0, то такая ячейка называется свободной, если же xij>0, то такая ...
... , является линейной функцией переменных : (2.4) Требуется в области допустимых решений системы уравнений (2.1) и (2.1.1) найти решение, минимизирующее линейную функцию (2.4). Таким образом, мы видим, что транспортная задача является задачей линейного программирования. Для ее решения применяют также симплекс-метод, но в силу специфики задачи здесь можно обойтись без ...
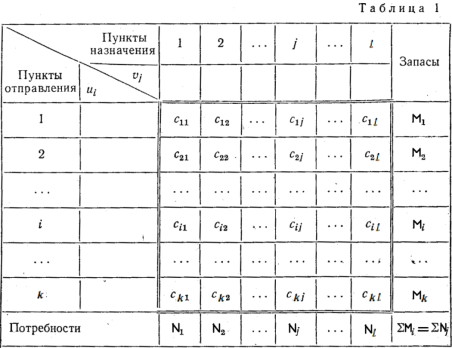
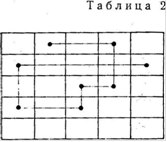
... метод потенциалов. Однако на распределительном методе основаны некоторые другие способы решения задач, что и вызывает необходимость его изучения. [5] 9. Метод потенциалов Решение транспортной задачи любым способом производится на макете. Макет для применения метода потенциалов имеет следующий вид. Основная часть макета выделена двойными линиями. Она содержит k×l клеток. Каждая ...
0 комментариев