Навигация
Расчёт намагничивающего тока
21773
знака
1
таблица
11
изображений
5. Расчёт намагничивающего тока
5.1 Значение индукций в зубцах ротора и статора:
![]() , (5.1)
, (5.1)
![]() (5.2)
(5.2)
5.2 Расчитаем индукцию в ярме статора Ba:
![]() (5.3)
(5.3)
5.3 Определим индукцию в ярме ротора Bj:
 , (5.4)
, (5.4)
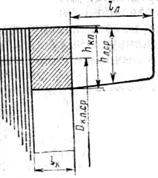
где h'j — расчетная высота ярма ротора, м.
Для двигателей с 2р≥4 с посадкой сердечника ротора на втулку или на оребренный вал h'j определяют по формуле:
 , (5.5)
, (5.5)
![]()
![]() , (5.6)
, (5.6)
где kд - коэффициент воздушного зазора, определим по формуле:
 , (5.7)
, (5.7)
где ![]()
![]()
Магнитное напряжение воздушного зазора:
![]()
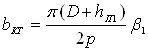
5.5 Магнитное напряжение зубцовых зон статора Fz1:
Fz1=2hz1Hz1, (5.8)
где 2hz1 — расчетная высота зубца статора, м.
Hz1 определим по [1] таблице П-1.7. При ![]() ,
, ![]() .
.
![]()
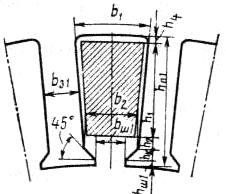
5.6 Магнитное напряжение зубцовых зон ротора Fz2:
![]() , (5.9)
, (5.9)
где ![]() ;
;
![]() , [1] таблица П-1.7.
, [1] таблица П-1.7.
![]()
5.7 Рассчитаем коэффициент насыщения зубцовой зоны kz:
![]() (5.10)
(5.10)
5.8 Найдём длину средней магнитной линии ярма статора La:
![]() (5.11)
(5.11)
5.9 Определим напряженность поля Ha при индукции Вa по кривой намагничивания для ярма принятой марки стали 2013 [1] таблица П-1.6. При ![]() ,
, ![]() .
.
5.10 Найдём магнитное напряжение ярма статора Fa:
![]() (5.12)
(5.12)
5.11 Определим длину средней магнитной линии потока в ярме ротора Lj:
 , (5.13)
, (5.13)
где hj - высота спинки ротора, находится по формуле:
![]() , (5.14)
, (5.14)
![]()
5.12 Напряжённость поля Hj при индукции ![]() определим по кривой намагничивания ярма для принятой марки стали [1] таблица П-1.6. При
определим по кривой намагничивания ярма для принятой марки стали [1] таблица П-1.6. При ![]() ,
, ![]() .
.
Определим магнитное напряжение ярма ротора Fj:
![]() (5.15)
(5.15)
5.13 Рассчитаем суммарное магнитное напряжение магнитной цепи машины (на пару полюсов) Fц:
![]() (5.16)
(5.16)
5.14 Коэффициент насыщения магнитной цепи ![]() :
:
![]() (5.17)
(5.17)
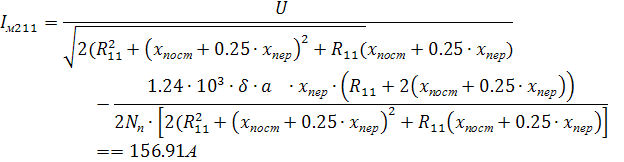
5.15 Намагничивающий ток ![]() :
:
![]() (5.18)
(5.18)
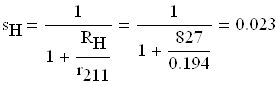
Относительное значение намагничивающего тока ![]() :
:
![]() (5.19)
(5.19)
Параметрами асинхронной машины называют активные и индуктивные сопротивления обмоток статора х1, r1, ротора r2, x2, сопротивление взаимной индуктивности х12 (или xм),и расчетное сопротивление r12 (или rм), введением которого учитывают влияние потерь в стали статора на характеристики двигателя.
Схемы замещения фазы асинхронной машины, основанные на приведении процессов во вращающейся машине к неподвижной, приведены на рисунке 6.1. Физические процессы в асинхронной машине более наглядно отражает схема, изображенная на рисунке 6.1. Но для расчета удобнее преобразовать ее в схему, показанную на рисунке 6.2.
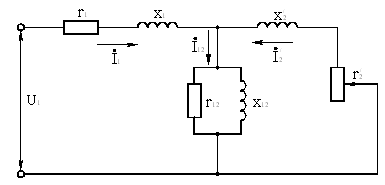
Рисунок 6.1. Схема замещения фазы обмотки приведенной асинхронной машины
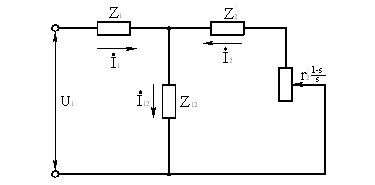
Рисунок 6.2. Преобразованная схема замещения фазы обмотки приведенной асинхронной машины
6.1 Активное сопротивление фазы обмотки статора ![]() расчитаем по формуле:
расчитаем по формуле:
![]() , (6.1)
, (6.1)
где L1 - общая длина эффективных проводников фазы обмотки, м;
а - число параллельных ветвей обмотки;
с115 - удельное сопротивление материала обмотки (меди для статора) при расчетной температуре. Для меди ![]() ;
;
kr - коэффициент увеличения активного сопротивления фазы обмотки от действия эффекта вытеснения тока.
В проводниках обмотки статора асинхронных машин эффект вытеснения тока проявляется незначительно из-за малых размеров элементарных проводников. Поэтому в расчетах нормальных машин, как правило, принимают kr =1.
6.2 Общую длину проводников фазы обмотки L1 расcчитаем по формуле:
![]() , (6.2)
, (6.2)
где lср - средняя длина витка обмотки, м.
6.3 Среднюю длину витка lср находят как сумму прямолинейных - пазовых и изогнутых лобовых частей катушки:
![]() , (6.3)
, (6.3)
где lП - длина пазовой части, равна конструктивной длине сердечников машины. ![]() ;
;
lл - длина лобовой части.
6.4 Длина лобовой части катушки всыпной обмотки статора определяется по формуле:
![]() , (6.4)
, (6.4)
где Кл - коэффициент, значение которого зависит от числа пар полюсов, для ![]() [1] таблица 9.23
[1] таблица 9.23 ![]() ;
;
bКТ - средняя ширина катушки, м, определяемая по дуге окружности, проходящей по серединам высоты пазов:
 , (6.5)
, (6.5)
где b1 - относительное укорочение шага обмотки статора. Обычно принимают ![]() .
.
![]()
Коэффициент ![]() для всыпной обмотки, укладываемой в пазы до запрессовки сердечника в корпус.
для всыпной обмотки, укладываемой в пазы до запрессовки сердечника в корпус.
![]()
Средняя длина:
![]()
Общая длина эффективных проводников фазы обмотки:
![]()
Активное сопротивление фазы обмотки статора:
![]()
6.5 Определим длину вылета по лобовой части:
![]() , (6.6)
, (6.6)
где Квыл - коэффициент, определяемый по[1] таблице 9.23. ![]() при
при ![]() .
.
6.6 Определим относительное значение сопротивления фазы обмотки статора ![]() :
:
![]() (6.7)
(6.7)
6.7 Определим активное сопротивление фазы обмотки ротора r2:
![]() , (6.8)
, (6.8)
где rс - сопротивление стержня;
rкл - сопротивление кольца.
6.8 Сопротивление стержня рассчитаем по формуле:
![]() (6.9)
(6.9)
6.9 Рассчитаем сопротивление кольца:
![]() (6.10)
(6.10)
Тогда активное сопротивление ротора:
![]()
6.10 Приведём r2 к числу витков обмотки статора, определим ![]() :
:
![]() (6.11)
(6.11)
Похожие работы
... на вале ротора, далее, посредством щеточного контакта, к обмотке ротора можно подключить пусковой реостат. В данном курсовом проекте речь пойдет о трехфазном асинхронном двигателе с короткозамкнутым ротором. 1. АНАЛИТИЧЕСКИЙ ОБЗОР 1.1 Современные серии электрических машин В 70-е годы была разработана и внедрена серия электродвигателей 4А, основным критерием при проектировании которой ...
... 218) (219) (220) (221) Пусковые параметры: (222) (223) (224) (225) (226) (227) (228) Результаты расчёта токов в пусковом режиме асинхронного двигателя с КЗ ротором учетом влияния эффекта вытеснения тока представлены в таблице 3.5.3 и 3.5.4. Таблица 3.5.3 – Расчет пусковых характеристик асинхронного двигателя с КЗ ротором учетом эффекта вытеснения тока и насыщения от ...
... 2,54 2,45 2,59 Графики пусковых характеристик спроектированного двигателя с короткозамкнутым ротором изображены на рисунке 6 и рисунке 7. Рисунок 6 – Зависимость Рисунок 7 – Зависимость Спроектированный асинхронный двигатель удовлетворяет требованиям ГОСТ как по энергетическим показателям (КПД и ), так и по пусковым характеристикам. 9. ТЕПЛОВОЙ РАСЧЁТ Превышение температуры ...

... Потери, не изменяющиеся при изменении скольжения : Pст. + Pмех. = 727,12+125,6 = 852,17 Вт. Таблица 1. Рабочие характеристики асинхронного двигателя. Параметр Ед-ца Скольжение 0,005 0,01 0,015 sн=0,019 0,02 0,025 0,03 a’×r’2/s Ом 48,53 24,27 16,18 12,77 12,13 9,71 8,09 b’×r’2/s Ом 0 0 0 0 0 0 0 R = a + a¢*r¢2/s Ом 49,04 ...
0 комментариев