Навигация
Анализ вариантов управления и существующего объема автоматизации технологической линии
33991
знак
6
таблиц
15
изображений
2. Анализ вариантов управления и существующего объема автоматизации технологической линии
Технологическая схема может иметь различные варианты реализации и автоматизации управления. Схемы приготовления корма могут иметь различную реализацию, определяемую зональными особенностями и принятой практикой кормления. Приготовление корма может осуществляться как в специализированных кормоцехах, либо может быть сблокировано со свинарником, либо иметь с ним транспортную связь. Раздачу корма на свинокомплексе реализуют по средствам передвижных (мобильных) и стационарных кормораздатчиков. Выбор типа зависит от способа кормления, зональных особенностей, условий содержания свиней, организации работ на ферме и других. Так же возможны два основных типа дозирования: объемный и весовой.
Схему управления можно реализовать как на основании релейно-контактной схемы, так и на базе контроллера. В курсовой работе схему реализуем на базе контроллера, что обусловлено следующими факторами:
1 надежность (исключение из схемы большого количества релейно-контактных элементов и регуляторов, что повышает надежность и позволяет проще устранять неполадки (сокращает возможные места их появления));
2 простота исполнения (удобный и доступный интерфейс контроллера позволяет реализовывать на нем требуемые задачи при минимуме затрачиваемых усилий);
3 возможность мониторинга (контроллер позволяет выполнять контроль и мониторинг, выполняемого процесса в реальном времени);
4 функциональность (в случае изменения технологического процесса (времени срабатывания, задержек, очередности выполняемых процессов, уставок), можно обойтись без внедрения новых элементов схемы, путем перепрограммирования контроллера);
5 экономическая целесообразность (стоимость контроллера при значительных реализуемых схемах, ниже стоимости аппаратуры, используемой без применения контроллера. Во многих случаях, применение контроллеров, не требует наличия постоянного обслуживающего персонала).
Таким образом, целесообразность применения контроллера при реализации алгоритма управления обоснована.
В целях автоматизации линии раздачи кормов в коровнике, рассмотрим агрегаты, входящие в состав линии:
Питатель картофеля, приводящийся в движение электродвигателем АИР90L4 мощностью 2,2 кВт и синхронной частотой вращения 1500 мин-1, дозатор – питатель кормнцкормов и насос обрата, приводящиеся в движение электродвигателями АИР71В4 мощностью 0,75 кВт и синхронной частотой вращения 1500 мин-1 , мешалка, приводящийся в движение электродвигателем АИР100S4 мощностью 3 кВт и синхронной частотой вращения 1500 мин-1 , выгрузные устройства с двигателем АИР80А4 мощностью 1,1 кВт и синхронной частотой вращения 1500 мин-1.
3. Техническое задание (требования к схеме управления)
Схема управления должна обеспечить работу системы в автоматическом и наладочном режимах и технологическую сигнализацию о работе оборудования и обеспечивать защиту от повторного включения приводов после пропадания напряжения в сети.
При работе системы необходимо предусмотреть:
1) включение по суточному реле времени;
2) включение линии при наличии комбикорма и концкормов в питателях, на одну раздачу;
3) начало раздачи после завершения процесса смешивания;
4) одновременная загрузка корма в смеситель;
5) возврат кормораздатчика после раздачи в исходное положение.
4. Разработка алгоритма управления оборудованием технологической линии
Как видно из анализа описания работы технологической линии и технического задания, для реализации управления, необходимо предусмотреть следующий объем технических средств автоматики:
Ø датчик уровня в питателях, емкости для обрата и смесителе, для контроля их заполнения;
Ø концевой выключатель, срабатывающий при положении раздатчика под питателем;
Ø концевые выключатели в конце и начале кормушек, для контроля положения кормораздатчика;
Ø суточное реле времени, функцию которого будет выполнять котроллер, для реализации включения линии по расписанию.
На основании вышеизложенного, составляем алгоритм управления, при этом примем следующие обозначения:
X1 – привод питателя картофеля;
X2 – привод питателя концкормов;
Х3 – привод насоса обрата;
X4 – привод мешалки раздатчика;
X5 – привод кормораздатчика (раздача);
X6 – привод выгрузного устройства 1
X7 – привод выгрузного устройства2;
X8 – привод кормораздатчика (обратный ход);
z’с– контакт суточного реле времени;
Z2 – реле времени (смешивание);
z'2 – контакт реле времени Z2;
Z3 – реле времени (реверс кормораздатчика);
z'3 – контакт реле времени Z3;
b1 – датчик уровня питателя картофеля;
b2 – датчик уровня питателя концкормов;
b3 – датчик уровня емкости для обрата;
b4 – датчик уровня смесителя;
b5 – концевик, срабатывающий при положении кормораздатчика под питателем;
b6 – концевик (начало кормушек);
b7 – концевик (конец кормушек).
Лини работает циклически по срабатыванию контакта суточного реле времени z'c. При наличии картофеля в питателе (сработал b1), концкормов (сработал b2) и обрата в емкости (сработал b3) включается Х4, Х1, Х2, Х3. Так же включается Z2, которое отсчитывает время смешивания. После заполнения смесителя срабатывает b4, отключается Х1, Х2, Х3 и включается Х5. Начинается движение кормораздатчик. После завершения смешивания срабатывает z’2 и отключается Х4. После достижения кормораздатчиком начала кормушек срабатывает b6 и включаются Х6 и Х7. При достижении кормораздатчиком конца кормушек срабатывает b7, отключается Х5 и с задержкой времени z’3 включается Х8, который отключается после срабатывания b5.
На основании всего вышеизложенного составляем схему алгоритма управления технологическим процессом.
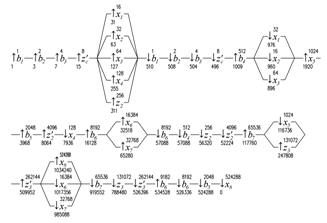
Рисунок 4.1 – Алгоритм управления
Вывод: Алгоритм реализуем, так как суммарное весовое состояние равно нулю. Схем управления реализуема без дополнительных элементов, так как в тактах алгоритма включения нет повторяющихся весовых состояний.
Похожие работы

... путем изменения воздухо-производительности вентилятора. 2. Общая электротехническая часть 2.1 Характеристики систем инженерного обеспечения здания свинарника В проектируемом свинарнике – откормочнике на 600 голов имеются следующие системы инженерного обеспечения: кормораздача, навозоудаление, водоснабжение, связь, вентиляция и отопление. Кормовая мешанка приготавливается в кормоцехе, ...
... На 5 листе графической части приведена принципиальная электрическая схема управления микроклиматом. 3. Безопасность жизнедеятельности 3.1 Требования безопасности при монтаже энергооборудования свинарника на 1200 голов При поступлении электродвигателей, электрических аппаратов и другого энергооборудования на ферму его необходимо очистить от пыли и консервирующих смазочных материалов. ...
... . ОБОСНОВАНИЕ КОНСТРУКТИВНОГО ИСПОЛНЕНИЯ В отношении опасности поражения людей электрическим током здание хранилища относится к помещениям с повышенной опасностью, так как основное помещение для хранения картофеля является особо сырым. При проектировании сельскохозяйственных объектов следует применять следующие способы прокладки электропроводок: - на тросе; - на лотках; - в коробах; - ...
... основе его широкой индустриализации. Современное развитие сельскохозяйственного производства предъявляет качественно новые требования к вопросам технологии содержания животных и птицы, машинам и оборудованию для комплексной механизации и автоматизации производственных процессов, объемно-планировочным и конструктивным решениям зданий и сооружений, на основе которых должны создаваться прогрес ...
0 комментариев