Навигация
Разработка структуры управления в автоматическом режиме работы оборудования
33991
знак
6
таблиц
15
изображений
5. Разработка структуры управления в автоматическом режиме работы оборудования
Разработку начинаем с составления структурной формулы. Для этого воспользуемся таблицами частных включений исполнительных механизмов. В нее входят: само исполнительное устройство, контакты командного аппарата, включающего исполнительный механизм, и контакты аппаратов, срабатывающих и обеспечивающих выполнение всех условий, предъявляемых к данной технологической линии.
Структурная схема исполнительного элемента Х1![]()
Таблиц 5.1 – Таблица частных включений ИЭ Х1
| Э | Вес Э | Такты | ||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |||
| x1 | 1 | - | - | - | - | + | + | + | + | + | + | - | - | |
| b1 | 2 | + | + | + | + | + | - | - | - | - | - | - | - | |
| b2 | 4 | - | + | + | + | + | + | - | - | - | - | - | - | |
| b3 | 8 | - | - | + | + | + | + | + | - | - | - | - | - | |
| z’c | 16 | - | - | - | + | + | + | + | + | - | - | - | - | |
| b4 | 32 | - | - | - | - | - | - | - | - | - | + | + | - | |
| Весовое состояние | 2 | 6 | 14 | 30 | 31 | 29 | 25 | 17 | 1 | 33 | 32 | 0 | ||
Из анализа весового состояния видно, что схему можно реализовать без дополнительных элементов.
Из структурной теории релейных устройств известна следующая структурная формула для определения первоначальной структуры элемента Х:
![]() ,
,
где fср(х) − логическое произведение контактов элементов в такте отпускания, обеспечивающих замкнутую цепь элемента, для которого определяется структурная формула(контакт элемента в fср не входит).
fотп(х) − логическое произведение контактов элементов в такте отпускания, обеспечивающих замкнутую цепь элемента, для которого определяется структурная формула (контакт элемента в fотп не входит).
![]() .
.
Используя закон де Моргана преобразуем полученное выражение.
![]() .
.
Для упрощения первоначальных структурных формул элемента можно воспользоваться таблицей покрытий. Она позволяет исключить из первоначальной структурной формулы лишние слагаемые, которые либо не реализуют какие-либо такты или реализуют их с помощью дополнительных слагаемых структурной формулы.
Таблица 5.2 – Таблица покрытий ИЭ Х1
| № | Цепь | Такты | |||||
| 4 | 5 | 6 | 7 | 8 | 9 | ||
| 1 |
| X | X | – | – | – | – |
| 2 |
| – | X | – | – | – | – |
| 3 |
| – | X | X | X | – | – |
| 4 |
| – | X | X | X | – | – |
| 5 |
| – | X | X | X | X | – |
| 6 |
| – | X | X | X | X | X |
![]() .
.
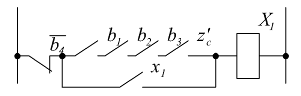
Рисунок 5.1 – Структурная схема управления ИЭ Х1
Проводим аналогичные операции и расчеты для остальных элементов. Структурные формулы и схемы включения для этих элементов сведем в таблицу 5.3.
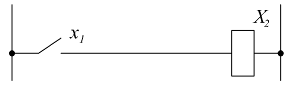
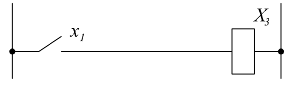
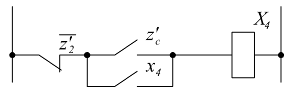
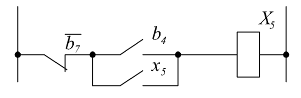
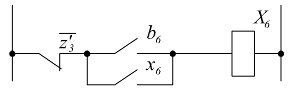
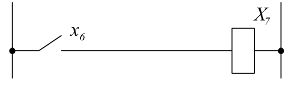
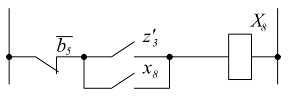
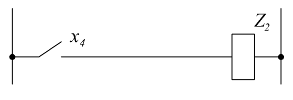
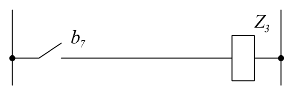
Таблица 5.3 - Структурные формулы и схемы включения
| Элемент | Структурная формула | Схема включения |
| X2 |
|
|
| X3 |
|
|
| X4 |
|
|
| X5 |
|
|
| X6 |
|
|
| X7 |
|
|
| X8 |
|
|
| Z2 |
|
|
| Z3 |
|
|
На основании полученных частных структурных схем всех элементов составим полную структурную схему управления технологическим процессом. При ее составлении произведем минимизацию схемы управления.
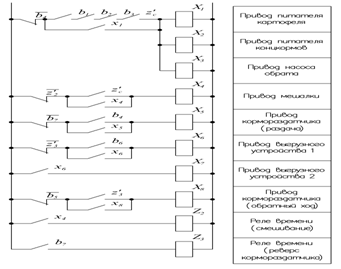
Рисунок 5.2 – Полная структурная схема управления технологическим процессом
Так как управление технологической линией осуществляется контроллером, произведем разработку программы управления.
Приведем пример представления принципиальной схемы ИЭ, выраженной во включении X1, X2, X3.
Составим таблицу входов выходов для программы управления элементами X1, X2, X3.:
Таблица 5.4 – Таблица входов выходов для программы управления элементом X1, X2, X3.
| вход | сигнал | выход | сигнал |
| I 01 | Датчик уровня b3 | O 01 | K1(привод питателя картофеля) |
| I 02 | Датчик уровня b1 | O 02 | K2(привод питателя концкормов) |
| I 03 | Датчик уровня b2 | O 03 | K3(привод насоса обрата) |
| I 04 | Датчик уровня b4 |
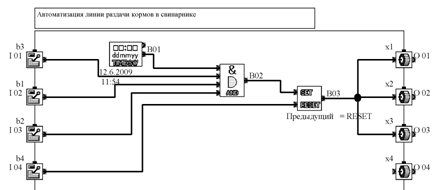
Рисунок 5.4 – Пример программы реализуемой на контроллере
Описание структурных блоков программы:
Линия запускается по сигналу от элемента TIMESW. В случае срабатывания датчиков (b1, b2, b3) на выходе логического элемента AND формируется логическая единица, которая поступает на вход SET элемента SET/RESET. В результате на выходах O 01…O 03 формируется логическая единица. Как только заполниться смеситель срабатывает датчик b5 и логическая единица со входа O 04 поступает на вход RESET элемента SET/RESET. В результате на выходах O 01…O 03 формируется логический ноль.
Аналогичным образом переводим остальные структурные формулы. Полученную программу приводим на рисунке 5.4
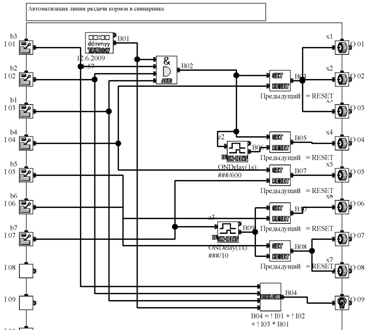
Рисунок 5.4 - Структурная схема САУ разработанная на базе α-2 контроллера
Похожие работы

... путем изменения воздухо-производительности вентилятора. 2. Общая электротехническая часть 2.1 Характеристики систем инженерного обеспечения здания свинарника В проектируемом свинарнике – откормочнике на 600 голов имеются следующие системы инженерного обеспечения: кормораздача, навозоудаление, водоснабжение, связь, вентиляция и отопление. Кормовая мешанка приготавливается в кормоцехе, ...
... На 5 листе графической части приведена принципиальная электрическая схема управления микроклиматом. 3. Безопасность жизнедеятельности 3.1 Требования безопасности при монтаже энергооборудования свинарника на 1200 голов При поступлении электродвигателей, электрических аппаратов и другого энергооборудования на ферму его необходимо очистить от пыли и консервирующих смазочных материалов. ...
... . ОБОСНОВАНИЕ КОНСТРУКТИВНОГО ИСПОЛНЕНИЯ В отношении опасности поражения людей электрическим током здание хранилища относится к помещениям с повышенной опасностью, так как основное помещение для хранения картофеля является особо сырым. При проектировании сельскохозяйственных объектов следует применять следующие способы прокладки электропроводок: - на тросе; - на лотках; - в коробах; - ...
... основе его широкой индустриализации. Современное развитие сельскохозяйственного производства предъявляет качественно новые требования к вопросам технологии содержания животных и птицы, машинам и оборудованию для комплексной механизации и автоматизации производственных процессов, объемно-планировочным и конструктивным решениям зданий и сооружений, на основе которых должны создаваться прогрес ...
0 комментариев