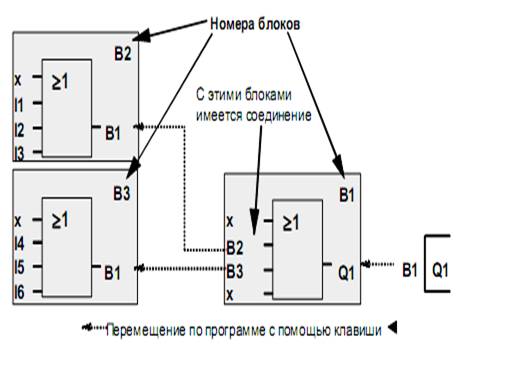
Навигация
Разработка цифрового блока управления
12213
знаков
2
таблицы
3
изображения
Содержание
Условие
1 Функциональная схема ЦБУ
2 Принцип действия
3 Импульсный датчик
4 Формирователь импульсов
5 Счетчик импульсов
6 Командные триггеры
7 Импульсные усилители мощности
Список используемой литературы
Условие
Объект разработкиРазработать цифровой блок управления (ЦБУ), резьбонарезным шпинделем обеспечивающим автоматически заданное количество оборотов метчика при прямом и обратном ходе, реверсирование и останов шпинделя. Пуск шпинделя должен осуществляться кнопкой или внешним импульсным сигналом. Приводом шпинделя является реверсивный двигателем постоянного тока последовательным возбуждением и двухсекционной обработкой (серии СЛ).
ЦБУ должен содержать фотоэлектрический импульсный датчик, формирователь импульсов, счетчик импульсов с предустановкой, командный триггер и импульсный усилитель мощности.
Исходные данные (Вариант № 33):
1. Элементная база – КМОП
2. Количество оборотов:
прямой ход kп=5+n=5+3=8;
обратный ход kо=6+n=6+3=9;
3. Относительный световой ток фотодиода
![]()
где IC - световой ток, IT - темновой ток
4. Напряжение питания электродвигателя UЭД=110 В
5. Ток электродвигателя IЭД=0,2*(n+1)=0.2*(3+1)=0.8 А
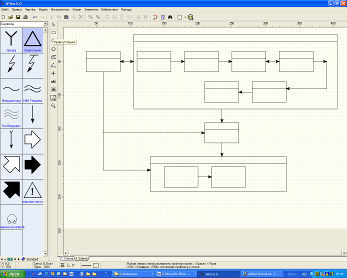
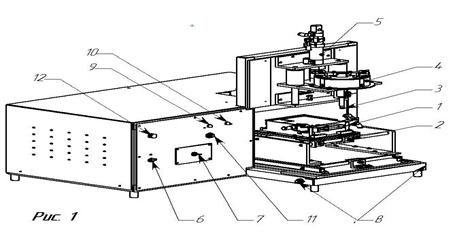
1 Функциональная схема ЦБУ
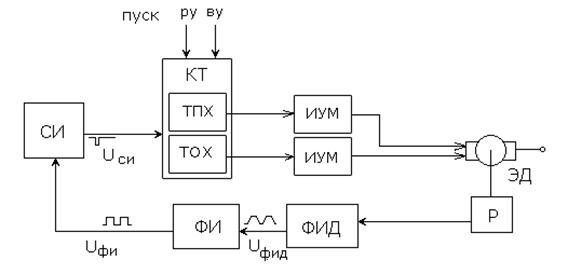
На рисунке 1 изображена функциональная схема, в состав которой входят:
ФИД - фотоэлектрический импульсный датчик. Датчик представляет собой оптрон, преобразующий поток излучения светодиода в импульсы тока фотодиода за счет периодического прерывания потока излучения вращающимся щелевым диском, установленным на выходном валу шпинделя.
Светодиод выбирается с ИК-спектром излучения для уменьшения влияния окружающего светового фона.
ФИ - формирователь импульсов. Формирователь импульсов выполняется на триггере Шмитта, в виде интегральной микросхемы и должен быть согласован по входному сопротивлению с фотоэлектрическим датчиком. На статистической характеристике формирователя Uвых =f(Uвх) необходимо определить уровни его срабатывания (Uср) и отпускания (Uот), а также уровни светового (Uс) и темнового (Uт) напряжений датчика.
СИ- счетчик импульсов. Счетчик обеспечивает подсчёт числа импульсов датчика, сформированных компаратором, и выдает на командный триггер сигнал после поступления заданного числа импульсов. Он может выполняться на одной или двух интегральных микросхемах.
КТ - командные триггеры ТПХ и ТОХ выполняются по схеме асинхронных RS- триггеров на ЛЭ «ИЛИ-НЕ» или «И-НЕ». ТПХ должен иметь два входа «Пуск» для кнопки ручного управления (РУ) и внешнего управления (ВУ). В схеме ЦБУ необходимо предусмотреть цепи «обнуления» командных триггеров и счетчика импульсов при включении напряжения питания.
ИУМ - импульсный усилитель мощности. Импульсный усилитель мощности выполняется на силовых транзисторах, работающих в ключевом режиме. Тип каждого транзистора выбирается по заданным значения напряжения и тока электродвигателя, а так же необходимому значению коэффициента передачи ß, определяемому по максимально возможному выходному току триггеров Iвых≤2мА.
ЛЭ - логические элементы. Они как вспомогательные устройства выбираются с минимальным количеством корпусов ИС и могут совмещаться по выполняемым функциям с триггером Шмита.
Р – редуктор, предназначен для уменьшения скорости вращения и увеличения крутящего момента.
2 Принцип действия
До начала работы требуется обнулить командные триггеры ТПХ и ТОХ. Далее, после подачи команды «пуск» от РУ или ВУ, командный триггер ТПХ переходит в состояние логической единицы.
Через импульсный усилитель мощности этот сигнал подается на электродвигатель. ЭД начинает вращаться, в прямом направлении. Импульсный датчик количества оборотов приводного вала начинает вырабатывать импульсы тока в соответствии с количеством оборотов.
Формирователь импульсов увеличивает крутизну фронта и среза импульсов датчика, обеспечивая требуемые сигналы на входе счетчика импульсов.
СИ считает количество импульсов. При подаче 8-го импульса ТПХ и 1-ый счётчик обнуляются, переключая триггер ТОХ в единичное состояние. При счете 15-го импульса вырабатывается сигнал, который обнуляет командный триггер ТОХ в логический ноль и сбрасывает 2-ой счетчик. Двигатель останавливается.
Для реализации устройства используем ИС серий К1554 и К1561.
Параметры ИС серии К1554:
Uп min, В 2
Uп max, В 6
При Uп = 5,0 В±10%:
U1вх min, В 3,15 - 3,85
U0вх max, В 1,35 – 1,65
Iвых max, мА 24
Параметры ИС серии К1561:
Uп min, В 3
Uп max, В 18
При Uп = 5,0 В±10%:
U1вх, В 4,95
U0вх, В 0,05
Iвых max, мА 24
Рассмотрим каждый элемент функциональной схемы.
Похожие работы
... шара, снабженного канавками на поверхности для создания оптимальной турбулентной струи пылевозд. смеси. 1.3 Разработка структурной схемы В данном разделе необходимо представить структурную схему (рис.1.3.1) разрабатываемого нами автоматизированного блока управления пневмокамерным насосом. Структурной называется схема, которая определяет функциональные основные части изделия и связи между ...
... сигналами времени. Ядро предлагает интерфейс для программирования приложения с целью получения функций в виде отдельных программ. 1.2 Разработка автоматизированной системы управления электроснабжением КС «Ухтинская» 1.2.1 Цель создания АСУ-ЭС Целью разработки является создание интегрированной АСУ ТП, объединяющей в единое целое АСУ электрической и теплотехнической частей электростанции, ...
... ранее компьютерных технологий, применяемых на этапах разработки объекта машиностроительного профиля, приведена в Приложении А. Глава 2. Современные компьютерные технологии при проектировании высокомоментного линейного привода с цифровым программным управлением Привод линейный синхронный представляет собой комплектный привод прямого действия на базе однокоординатного синхронного линейного ...
... ) более 8 раз в течение (32±2)с, подать напряжение на контакт 3 разъема ХР2, обеспечивая формирование кодов в соответствии с пунктом 2 таблицы 1 и начать отсчет времени tв, по истечении которого блок управления должен вновь начать отработку алгоритма по пунктам а), б). При повторении условий по пункту и) блок управления должен отработать алгоритм по пункту з). 2.4. Обоснование выбора элементной ...
0 комментариев