Навигация
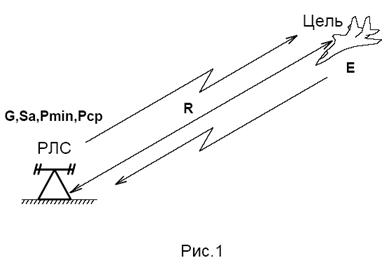
1. Расчет активной помехи.
Активные помехи работе РЛС создаются путем излучения электромагнитной энергии. Основным средством создания организованных активных помех являются специальные передатчики помех. Ввиду того, что одним передатчиком помех невозможно перекрыть весь диапазон частот, применяемый в радиолокации, в состав станций помех обычно входит несколько передатчиков, каждый из которых перекрывает часть общего диапазона. Чтобы число передатчиков было наименьшим, каждый из них должен создавать помехи в возможно более широком диапазоне частот. Вследствие этого и антенны передатчиков помех должны быть широкополосными.
Поскольку подавляемые РЛС принимают прямые сигналы передатчика помех, средняя мощность последнего может быть сравнительно небольшой, порядка десятков — сотен ватт. При этом достигается достаточное превышение помехи над отраженным сигналом на входе приемника РЛС, необходимое для нарушения нормальной работы или полного ее подавления. Применение направленной антенны в передатчике помех позволяет увеличить эффективность активной помехи без увеличения мощности передатчика. Однако в этом случае эффективность помех зависит еще и от точности ориентирования направленной антенны, что вызывает необходимость определения направления на РЛС и ориентации антенны передатчика помех. При ненаправленной антенне эта необходимость отпадает, но возникает опасность создания помех своим станциям. Поэтому антенна выбирается из условий тактического использования передатчика помех и места его установки.
Передатчики помех могут устанавливаться на самолетах, воздушных шарах, ракетах, кораблях, на земле, а также могут выбрасываться на поплавках в море или на парашютах на территорию противника с густой сетью радиолокационных средств. Способ использования передатчиков помех выбирается исходя из конкретной обстановки, но в качестве постоянно действующего считается способ установки и использования передатчиков помех на самолетах, а также в районе защищаемых объектов. Самолеты, оборудованные передатчиками помех и разведывательной аппаратурой, могут включаться в состав боевых порядков для прикрытия их помехами от наблюдения РЛС противника. Наилучшие результаты дает применение комбинированных помех, т. е. одновременная постановка пассивных и активных помех. В зависимости от частоты настройки передатчика помех различают прицельные и заградительные активные помехи. Прицельная помеха может быть узкополосной, так как она создается путем настройки передатчика помех на рабочую частоту подавляемой РЛС с ошибкой, не превышающей половины полосы пропускания приемника РЛС. Заградительная помеха создается либо путем одновременного излучения передатчиком помех электромагнитных колебаний в широкой полосе частот, либо путем автоматической и периодической перестройки узкополосного передатчика помех в широком диапазоне частот.
Все активные помехи характеризуются плотностью мощности или числом ватт мощности, приходящимся на мегагерц полосы частот помехи. Плотность помехи определяет ее уровень на входе приемника РЛС. Узкополосная прицельная помеха имеет большую плотность при малой мощности передатчика и поэтому экономична. Однако создание прицельной помехи требует применения сложной аппаратуры управления для быстрой и точной настройки передатчика помех. Трудности создания прицельных помех возрастают с увеличением числа объектов подавления и применением быстрой перестройки в самих РЛС. Заградительная помеха, наоборот, не требует точной настройки передатчика помех на частоту подавляемой РЛС, так как она создается в широкой полосе частот и обеспечивает одновременное подавление всех РЛС (или каналов одной РЛС), работающих в этом диапазоне частот. При организации заградительных помех требуется знание меньшего количества разведданных о системе радиолокационного обеспечения противника. Однако для создания такой же плотности мощности, как у прицельной помехи, передатчик заградительной помехи должен иметь, значительно, большую полную мощность, габариты и вес.
Таким образом, важнейшими показателями активных помех являются полоса частот и плотность мощности. Чем больше спектр частот и плотность мощности помехи, тем труднее от нее отстроиться и тем эффективнее она поражает приемные каналы РЛС.
По ТЗ заданно рассмотреть активную шумовую помеху. Шумовая помеха представляет собой непрерывные колебания несущей частоты, модулированные по амплитуде напряжением шумов. Напряжение шумов для модуляции передатчика помех получают от специального источника шумов, которым может быть шумовой диод, фотоэлектронный умножитель, тиратрон, помещенный в магнитное поле и др. С анодной нагрузки тиратрона, например, можно получить напряжение шумов до 0,5 в/МГц (другие источники шумов имеют в тысячи раз меньший выходной эффект). Такое напряжение достаточно усилить широкополосным видеоусилителем в сотни раз, чтобы затем использовать его в качестве модулирующего. Амплитуда, частота и фаза шумовых флюктуаций изменяются хаотически во времени, ввиду чего шумовая помеха обладает очень широким спектром частот и поэтому является наиболее опасной. Для защиты РЛС от шумовой помехи трудно найти эффективные средства защиты. Изображение шумовой помехи на экране индикатора с амплитудной отметкой имеет вид сплошной шумовой дорожки, на фоне которой затрудняется или совсем исключается наблюдение отметок целей (рис. 8).
Вариант структурной схемы передатчика активных помех приведен на рис. 9. В качестве передающей/приемной антенн используем ФАР,которая позволяет сконцентрировать энергию в узком луче и направит ее на подавляемые радиосредства и за счет фазирования можно довести ![]() , где Р – мощность подведенная к передающей антенне. Для рассчитываемой системы помехопостановки будем использовать передатчик АШП с мощностью излучения 10 кВт.
, где Р – мощность подведенная к передающей антенне. Для рассчитываемой системы помехопостановки будем использовать передатчик АШП с мощностью излучения 10 кВт.
Организация и создание пассивных помех в работе РЛС противника имеют своим назначением обеспечить радиолокационную маскировку объектов в воздухе и на земле. Методы пассивного радиопротиводействия основаны на использовании или на подавлении отражения радиоволн — явления, которое лежит в основе работы большинства самих РЛС. В связи с этим радиолокационная маскировка объектов осуществляется либо путем применения различного рода искусственных пассивных отражателей, интенсивно отражающих радиосигналы РЛС, либо путем нанесения на объект противорадиолокационных покрытий, эффективно ослабляющих отражение. В первом случае наблюдение отметки цели на экране индикатора РЛС затруднено на фоне интенсивных отметок пассивных отражателей, а во втором случае обнаружение цели затрудняется из-за весьма слабого отражения, ею радиоволн.
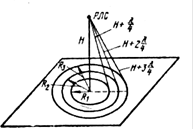
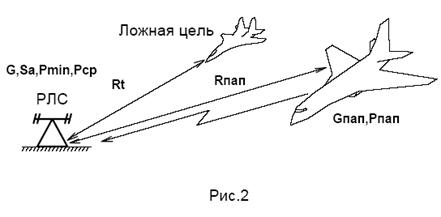
По ТЗ заданна помеха от земной поверхности. Рассмотрим создание ложных целей и ложного радиолокационного рельефа местности. В интересах маскировки важных наземных и надводных объектов и дезориентации противника при наблюдении им подобных объектов с воздуха при помощи панорамных РЛС прибегают к созданию ложных целей или ложного радиолокационного рельефа местности. В таких случаях применяют как дипольные отражатели, так и пассивные отражатели специальной формы: уголковые, конические, вибраторные решетки, линзы Люнеберга, диэлектрические отражатели с полным внутренним отражением и др. Наиболее широкое применение получили уголковые отражатели, которые выполняются в виде жесткой конструкции из взаимно перпендикулярных проводящих поверхностей. Размеры, которых превышают длину отражаемой радиоволны (рис. 10).
радиообнаружение помехозащита аппаратный радиолокационный

Важнейшей особенностью уголкового отражателя является то, что он интенсивно отражает обратно к источнику излучения (после двух-трехкратного внутреннего отражения) энергию радиоволн, падающих на грани А,Б и В с любого направления в пределах телесного угла. Соединение четырех трехгранных уголков вместе позволяет получить интенсивное отражение обратно к РЛС энергии радиоволны, падающей на уголок с любого направления в пределах полусферы. Используются и более сложные конструкции уголковых отражателей. Устанавливать их можно как на земле, так и на воде (на поплавках), имитируя интенсивно отражающие цели и маскируя боевую технику и другие объекты от воздушного радиолокационного наблюдения. При массовом применении уголковых и дипольных отражателей на поверхности земли и воды можно существенно изменить радиолокационный рельеф местности. Таким способом можно создавать ложные площадные цели, дублирующие изображение маскируемых объектов: аэродромов и стоянок самолетов, портов и стоянок кораблей или их боевого порядка в море, мостов, заводов и даже городов. Аналогичным образом можно изменить береговую черту, изображение одного озера можно разбить на части, на реках «поставить» дополнительные мосты и т. п. Создание ложного радиолокационного рельефа местности может сильно затруднить ориентировку противника по экрану самолетной панорамной РЛС и прицельное бомбометание, а также заставить противника наводить ракеты на ложные цели. В мирное время уголковые и другие отражатели используются для создания точечных целей, которые служат указателями при радиолокационном ориентировании кораблей, входящих в гавань, самолетов, приближающихся к аэродрому, или расчетов РЛС при их тренировке и проверке работы радиолокационной аппаратуры. Ложные цели создаются и в воздухе, например путем буксирования отражающих конусов. В последнее время для нарушения работы станций управления ракетами, зенитной артиллерией и истребителями-перехватчиками разрабатываются управляемые отвлекающие ракеты-ловушки и ракеты радиопротиводействия с аппаратурой помех, запускаемые с тяжелых бомбардировщиков в полете. После выполнения задачи по созданию помех и отвлечению на себя средств противника такие ракеты уничтожаются по радиокоманде с бомбардировщика.
Расчет зон прикрытия помехами
По ТЗ необходимо рассчитать параметры постановщика активной шумовой помехи. Как говорилось ранее, для создания активной шумовой помехи необходимо воздействие мощного источника помехи, тогда на дальность действия РЛС действуют как внутренние шумы приемника, так и мощность помехи.
Максимальная дальность действия РЛС в условиях радиопротиводействия может быть записана в виде:
 .
.
РРЛС – мощность передатчика РЛС,
Т – время обзора сектора сканирования,
σ – ЭПР цели,
R2П – дальность до источника помехи,
![]() fП – ширина спектра помехи,
fП – ширина спектра помехи,
![]() – уровень боковых лепестков, отнесенный к уровню главного лепестка антенны,
– уровень боковых лепестков, отнесенный к уровню главного лепестка антенны,
![]() - угловой объем,
- угловой объем,
E/N0 – отношение энергии сигнала к мощности шума на единицу полосы, необходимое для надежного обнаружения,
PП – мощность помехи,
GП – коэффициент усиления антенны по помехе.
Проведем расчет коэффициента усиления антенны РЛС по помехе. Коэффициент усиления антенны РЛС при приеме полезного сигнала равен 600; помеха принимается в основном боковыми лепестками, примем уровень первого бокового лепестка антенны РЛС= -25дБ по мощности, тогда коэффициент усиления антенны РЛС по помехе будет равен:
![]() =1,897.
=1,897.
Рассмотрим следующие зависимости:
а) дальность действия РЛС от мощности передатчика (рис. 11).

Рисунок 11. График зависимости дальность действия РЛС от мощности передатчика.
Мощность передатчика РЛС, необходимая для обнаружения РРЛС=200кВт, из графика видно, что при такой мощности обеспечивается дальность действия РЛС – 200км. По ТЗ необходимо обеспечить 260км, для этого нужно увеличить РРЛС в 2,5 раза.
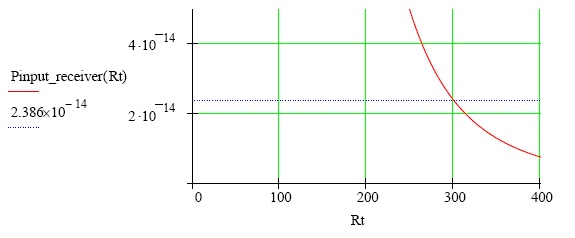
б) зоны прикрытия АП от мощности РЛС в условиях АП, при мощности АП равной 10кВт и расстоянием между РЛС – ПАП равным 260км (рис. 12).
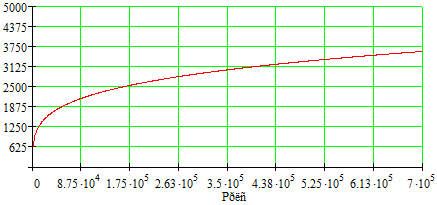
Рисунок 12. График зависимости зоны прикрытия АП от мощности РЛС в условиях АП.
Из графиков видно, что применение АШП значительно снижает дальность действия РЛС. При мощности передатчика РЛС 200кВт, дальность действия РЛС равна 2,7км.
Отношение мощности АП к мощности сигнала, отраженного от цели, на входе РЛС можно записать в виде:
 è
è
è![]()
При дальности от РЛС до Ц 200 км, при расстоянии от РЛС до ПАП 260 км, GАП=100, GРЛС=600, G=1.897, РперРЛС=200 кВт для формирования на входе РЛС отношения РАП/Рс=3, получаем:
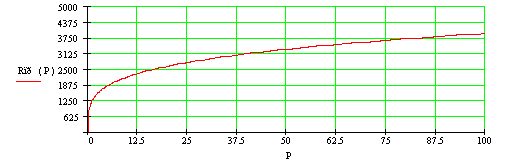
в) зависимость дальности действия РЛС, от отношения мощностей P=РРЛС/РПАП(рис. 13).
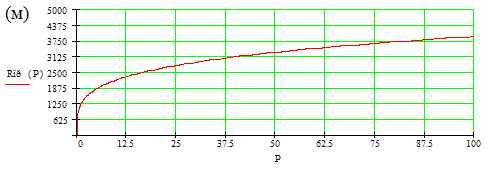
 (м)
(м)
Рисунок 13. График зависимости дальность действия РЛС от отношения мощностей P=РРЛС/РПАП.
Из графика следует, что даже при небольшом изменении РПАП, дальность действия РЛС значительно снижается. При Р=20, дпльность действия РЛС равна 2,7км.
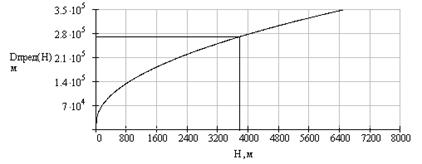
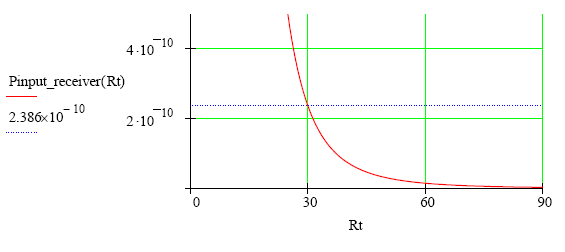
г) дальности действия РЛС от расстояния РЛС-ПАП.
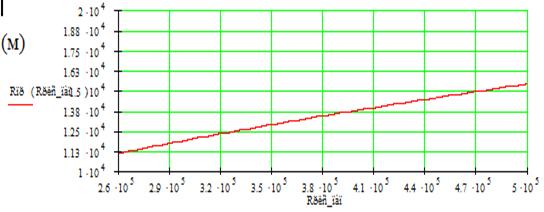
Рисунок 14. График зависимости дальность действия РЛС от расстояния РЛС-ПАП.
Пусть ПАП находится на удалении 260-500км, тогда, как видно из графика, дальность действия РЛС изменяется несущественно: в пределах 5км.
д) дальности действия РЛС от Кпер=![]() .
.
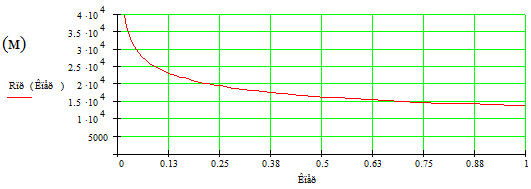
Рисунок 15. График зависимости дальность действия РЛС от Кпер.
Из графика следует вывод, что с увеличение Кпер дальность действия РЛС уменьшается. Коэффициент перекрытия по частоте показывает на сколько спектр сигнала согласован со спектром помехи. Когда Кпер=1, то дальность действия РЛС всего 15 км.
Расчет параметров средств помехозащиты
Похожие работы
... то Видно, что выполнение РЛС своих задач, в условиях применения комплекса помех, почти невозможно. Не стоит забывать, что устройства постановки помех, так же как и устройства борьбы с ними, динамично развиваются. Чаще всего средства нападения оказываются «сильнее», а адекватные меры противодействия появляются лишь через некоторое время, поэтому оценить эффективность средств помехозашиты и ...
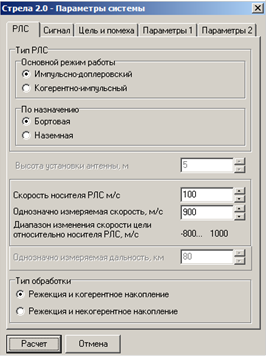

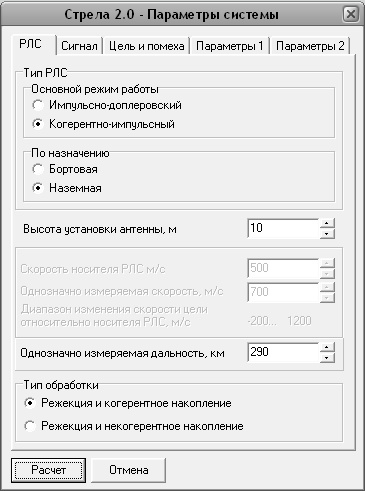
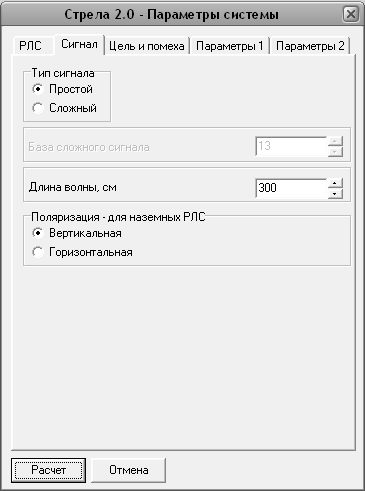
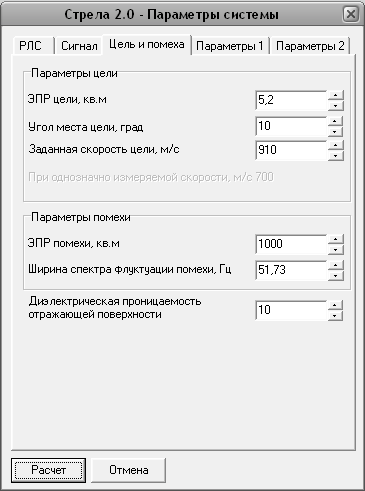
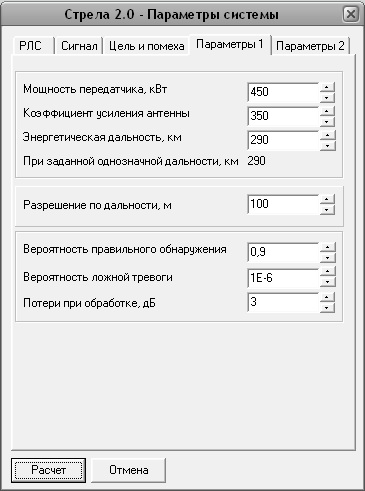
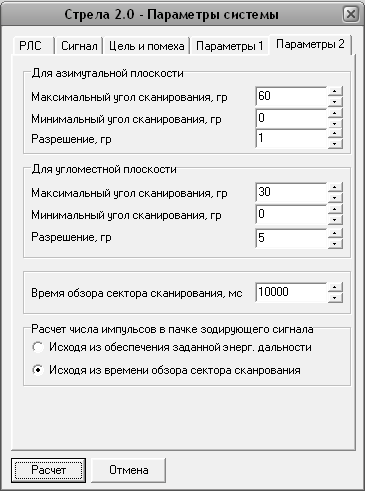
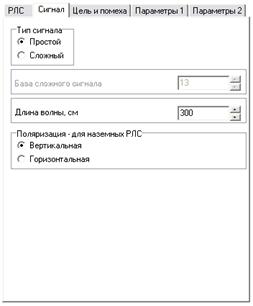
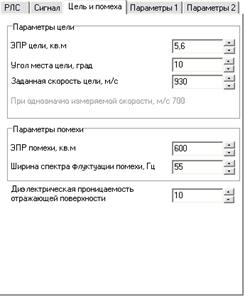
... ) целей вплоть до их типа с ранжированием по степени важности (опасности); o выдача команд целеуказания средствам поражения и формирование для них команд радиокоррекции; o точное определение расположения препятствий на пути следования вертолета. Расчет параметров РЛС радиоэлектронный защита помеха Расчет будем производить с помощью программы "Стрела". В окне параметров системы на пяти ...


... защиты от УП является введение в РЛС режима сопровождения слабого сигнала, при котором при воздействии ответной помехи (первый этап в постановке УП) продолжается сопровождение менее мощного сигнала от цели. 5. Анализ эффективности применения комплекса помех и средств помехозащиты При воздействии только пассивных помех с рассчитанными в пункте 4.1 параметрами отношение сигнал/помеха на входе ...
... целей, то вероятность правильного обнаружения снижается в 1.5 раза. 7. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон. Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств ...
0 комментариев