Навигация
3. Расчет параметров РЛС
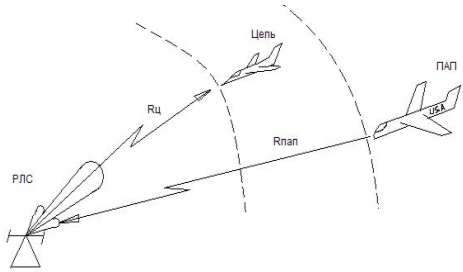
Для расчета параметров РЛС воспользуемся программой «Стрела». В качестве исходных данных выбираем параметры заданные в ТЗ: максимальная дальность обнаружения (290 км), максимальная скорость цели (910 м/с), минимальная ЭПР обнаруживаемой цели (5,2м2). Остальные данные при расчетах будут выбираться на усмотрение разработчика.
На первой закладке «РЛС» выбираем:
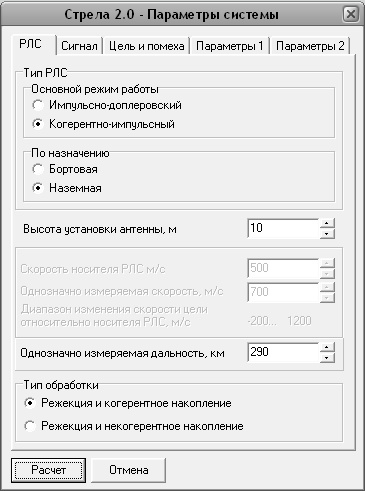
Тип РЛС: по основному режиму работы она является когерентно-импульсной, по назначению — наземной.
Высоту установки антенны выбираем равной 10м.
Однозначно измеряемую дальность выбираем в соответствии с ТЗ равной 290 км.
Тип обработки задаем: режекция и когерентное накопление, некогерентное накопление хотя и реализуется немного проще, но приводит к значительным потерям в обнаружении.
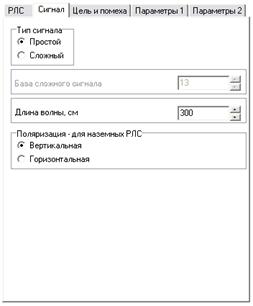
На второй закладке «Сигнал» выбираем:
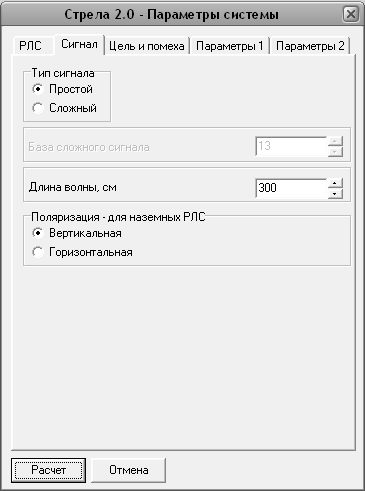
Тип сигнала. Применение сложного сигнала предпочтительней, т. к. при этом увеличивается разрешающая способность по дальности при постоянной разрешающей способности по скорости, а так как в ТЗ не поставлена задача об определении скорости, то дабы не усложнять систему воспользуемся простым сигналом.
Длина волны: 3м (для РЛС дальнего обнаружения типичны метровые волны).
Тип поляризации — вертикальная.
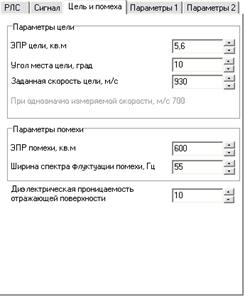
На третьей закладке «Цель и помеха» выбираем:
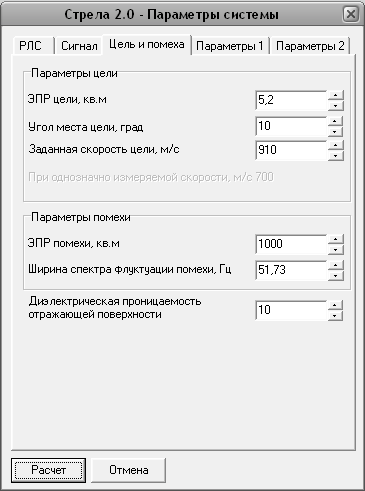
Параметры цели.
ЭПР цели задано в ТЗ и равно 5,2 м2.
Угол места цели зададим 10°.
Скорость цели выбираем из ТЗ: 910 км/ч.
Параметры помехи.
ЭПР помехи равную 1000 м2.
Ширина спектра флуктуации подбирается таким образом, чтобы ширина спектра помехи нормированная к периоду повторения РЛС находилась в пределах 0,02…0,25, зададимся значением 0,1, т. е.
![]() .
.
Период повторения можно рассчитать по формуле:
 .
.
Таким образом ширина спектра флуктуации помехи равна:
![]() .
.
Диэлектрическая проницаемость отражающей поверхности априорно неизвестна, поэтому зададимся значением 10.
На четвертой закладке «Параметры 1» выбираем:
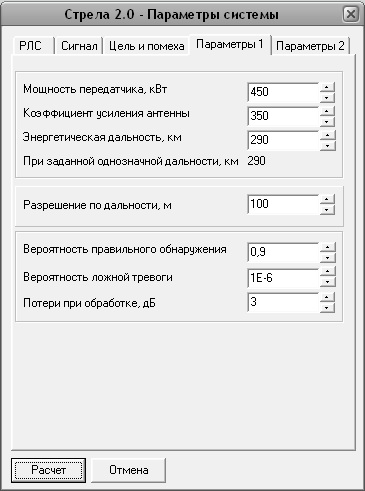
Мощность передатчика: 450 кВт.
Коэффициент усиления антенны: 350.
Энергетическую дальность равной однозначной дальности и равной 290км.
Разрешение по дальности: 100 м, что приемлемо для современных РЛС.
Вероятность правильного обнаружения равной 0,9.
Вероятность ложной тревоги равной 10-6, эти требования предъявляются современным РЛС.
Потери при обработке будут составлять 3 дБ.
На пятой закладке «Параметры 2»выбираем:
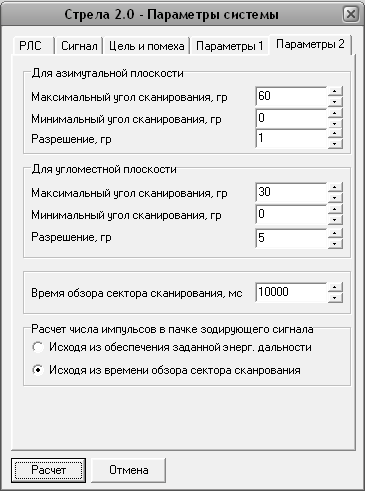
Как правило, параметры для азимутальной и угломестной плоскостей задаются в ТЗ, но так как они не заданы, выберем их.
Для азимутальной плоскости.
Максимальный угол сканирования: 60°.
Минимальный угол сканирования: 0°.
Разрешение: 1°.
Для угломестной плоскости.
Максимальный угол сканирования: 30°.
Минимальный угол сканирования: 0°.
Разрешение: 5°.
Время обзора сектора сканирования выбирается равным 10 с.
расчет числа импульсов в пачке зондирующего сигнала производится исходя из времени обзора сектора сканирования.
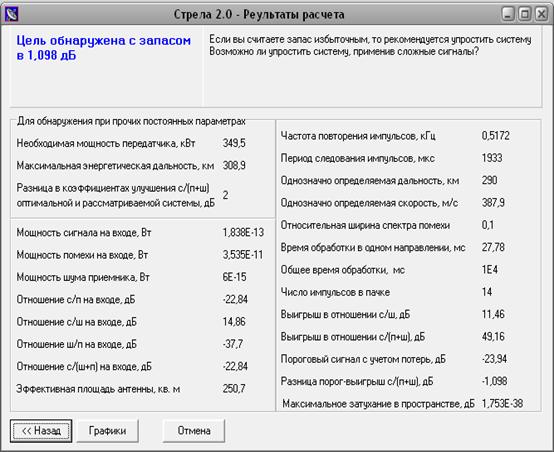
При расчете получены следующие данные:
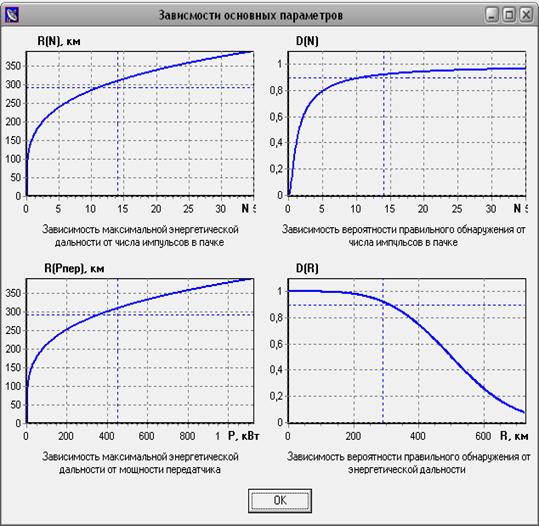
Так же получены графики зависимости основных параметров:
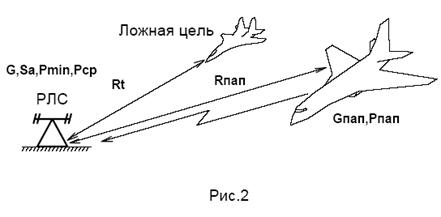
4. Расчет параметров помехопостановщика
Из ТЗ следует, что противник применяет пассивные помехи, активные шумовые помехи и уводящие по дальности помехи. рассчитаем параметры постановщиков этих помех.
Пассивные помехи.
На самолете противника стоит система, которая определяет длину волны электромагнитной волны излучаемой, разрабатываемой РЛС. И на самолете нарезаются легкие ленты длинной равной половине длины волны.
Длина диполя создающего максимальное отражение зависит от толщины, если длина волны изменяется на 20%, а длина диполя сохраняется той же, то ЭПР уменьшается в 2 раза.
Ориентация диполей очень важна, но так как она случайна, то ![]() . ЭПР помехи равна 1000 м2. Следовательно требуется
. ЭПР помехи равна 1000 м2. Следовательно требуется ![]() диполей.
диполей.
Кроме простых диполей применяют широкодиапозонные металлизированные ленты, создающие отражение в более широком диапазоне частот.
Активные шумовые помехи.
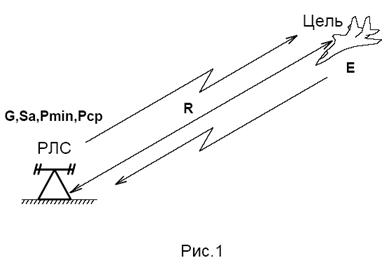
Максимальная дальность действия радиолокатора в условиях радиопротиводействия определяется как:
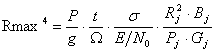
Р – мощность передатчика РЛС,
g – уровень боковых лепестков, отнесенный к уровню главного лепестка антенны,
t – время обзора сектора сканирования,
![]() - угловой объем,
- угловой объем,
σ – ЭПР цели,
E/N0 – отношение энергии сигнала к мощности шума на единицу полосы, необходимое для надежного обнаружения,
Rj – дальность до источника помехи,
Bj – ширина спектра помехи,
Pj – мощность помехи,
Gj – коэффициент усиления по помехе.
По этой формуле можно построить зависимость максимальной дальности от ряда параметров, как самой РЛС, так и постоновщика помех.
Коэффициент усиления антенны РЛС при приеме полезного сигнала 350; помеха принимается в основном по боковым лепесткам, примем уровень первого бокового лепестка антенны РЛС= -25дБ по мощности, тогда коэффициент усиления антенны РЛС по помехе будет равен:
![]() .
.
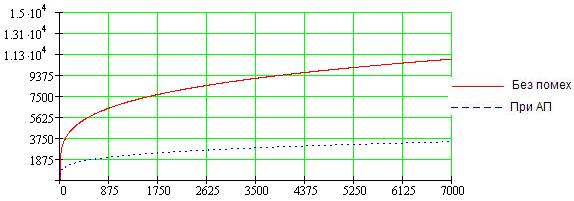
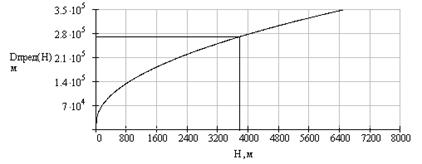
График зависимости дальности действия РЛС, от отношения мощностей РРЛС/РПАП, при расстоянии РЛС-ПАП 400 км
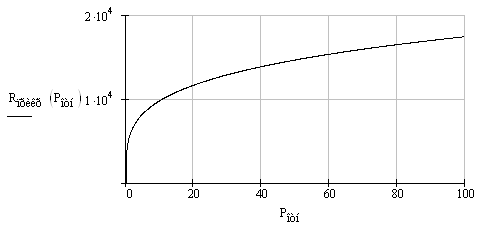
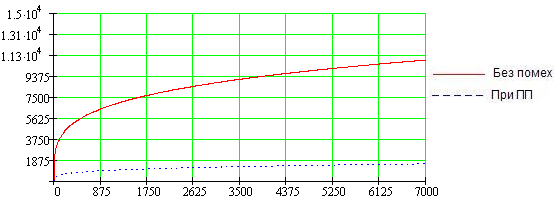
График зависимости дальности действия РЛС от расстояния РЛС-ПАП, при РПАП/РРЛС=70
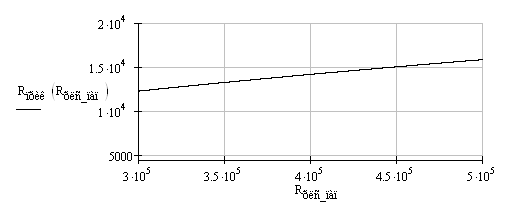
График зависимости дальности действия РЛС от Кпер=![]() , при РПАП/РРЛС=70, расстоянии РЛС-ПАП 400 км
, при РПАП/РРЛС=70, расстоянии РЛС-ПАП 400 км
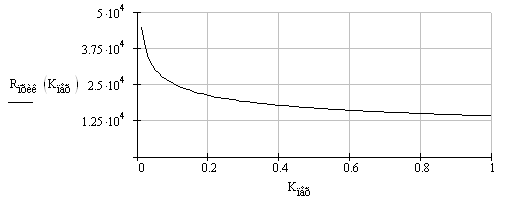
Применение АШП значительно снижает дальность действия РЛС, но при несогласованности параметров подавляемой станции и помехи, эффективность помехи значительно уменьшается, что говорит о необходимости согласования параметров помехи и подавляемой РЛС. Данные о параметрах РЛС, которую надо подавить добываются разведкой или оцениваются в режиме реального времени. Таким образом для эффективного радиоэлектронного подавления необходима обратная связь, то есть измерение параметров подавляемого объекта, фиксации структуры сигнала и режима работы. Для осуществления такого контроля необходимо создавать паузы в работе излучателя помех, что позволяет повысить эффективность средств РЭП за счет большей точности согласования параметров подавляемой станции и параметров АШП. Структурная схема постановщика АШП приведена ниже:
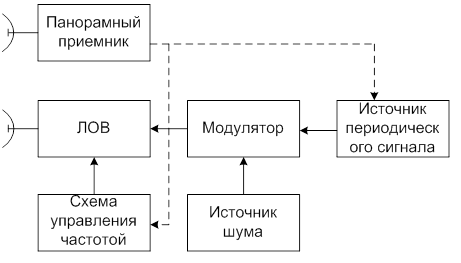
Панорамный приемник осуществляет оценку параметров подавляемой РЛС и передает их на постановщик помех. Параметры излучения постановщика АШП должны корректироваться в соответствии с данными, полученными от панорамного приемника. Схема управления частотой обеспечивает перестройку постановщика АП в требуемом диапазоне частот. Такой алгоритм работы постановщика АШП позволит максимально повысить его эффективность.
Система помехопостановки будет использовать передатчик АШП с мощностью излучения 10 кВт. Передатчик с такой мощностью излучения можно реализовать на борту летательного аппарата, а его эффективность при хорошем согласовании параметров АШП и РЛС будет высока.
Помехи уводящей по дальности.
Для создания помехи выберем ретрансляторную схему, основанную на приеме, задержке, усилении и переизлучении принятого от РЛС сигнала. Задержка сигнала, принятого от РЛС необходима для формирования требуемых дальностей до ложных целей, так как информация о дальности до цели содержится в задержке отраженного сигнала относительно зондирующего. Переизлучение принятого зондирующего сигнала обеспечивает согласование помехи и РЛС.
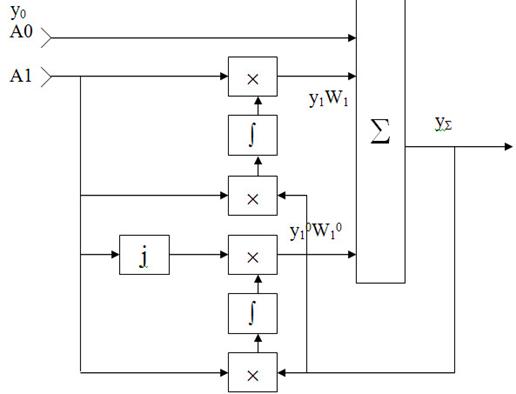
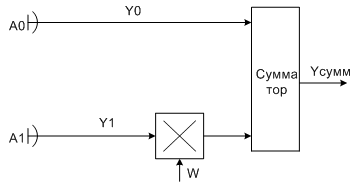
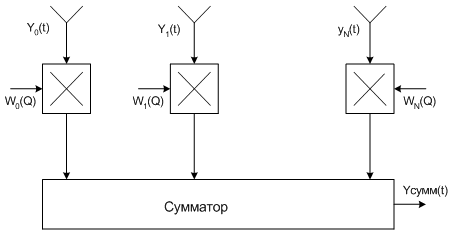
Необходимо нарушать работу следящей системы по дальности. Для этого необходимо совместить сигнал помехи с полезным сигналом, а затем, плавно изменяя параметры помехи «увести» систему сопровождения за ложной целью. С точки зрения РЛС необходимо обеспечить работу АСД в условиях таких помех. При наличие помех каналам сопровождения по дальности происходит срыв селекции цели, срыв сопровождения, что переводит многоцелевую РЛС в одноцелевую. Как минимум действие помех приводит к погрешности в определении дальности. Структурная схема постановщика помехи представлена ниже:
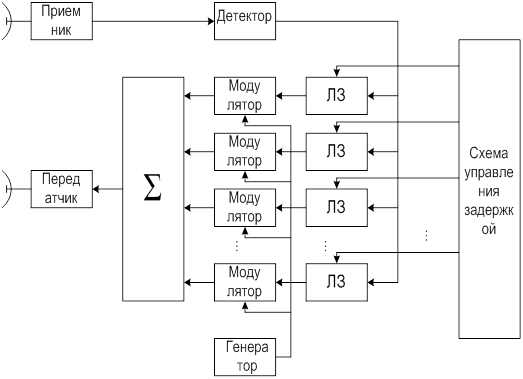
Схема управления задержкой формирует требуемые дальности до ложных целей и обеспечивает согласованность помех по каналам дальности и скорости, что исключает (или усложняет) селекцию ложных целей путем сравнения этих каналов. Модулятор «добавляет» к информации о дальности ложную информацию о других параметрах цели, получаемых из огибающей РЛ сигнала, его частотной модуляции, мощности. Генератор формирует несущую частоту излучаемой помехи. Сумматор суммирует сигналы, формируемые различными каналами, для дальнейшего излучения одной антенной системой.
При действии помех большого уровня система АРУ уменьшает усиление, что приводит к потере реальных сигналов, но, в тоже время, чрезмерно высокий уровень помехи может служить, для системы селекции помех, признаком позволяющим отсеять помеху, поэтому мощность помехи на входе РЛС не должна превышать уровень сигнала более чем в 3..5 раз. Применение помехи с изменяющимся уровнем мощности увеличит вероятность захвата уводящей помехи системой АСД в случае неизвестной дальности РЛС-ПАП, или в случае неизвестного алгоритма селекции помех в РЛС.
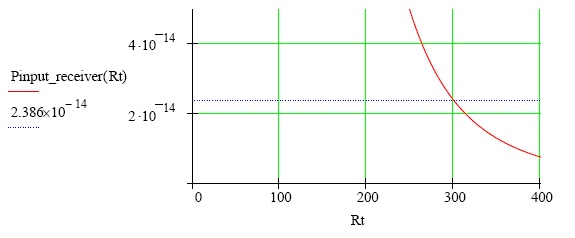
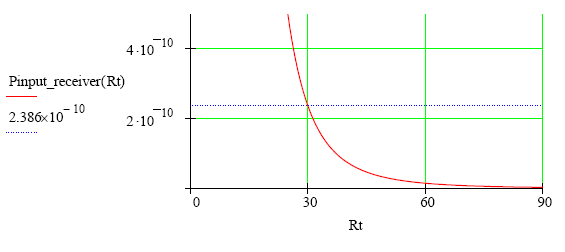
Отношение мощности АП к мощности сигнала, отраженного от цели, на входе РЛС, описывается выражением:
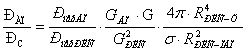
Из этой формулы можно рассчитать мощность передатчика АП (РперАП), необходимую, для создания на входе приемника РЛС отношения РАП/Рс=3.
![]()
При расстояниях РЛС-цель 200 км и РЛС-ПАП 400 км, GАП=100, GРЛС=350, G=1.1, РперРЛС=450 кВт для формирования на входе РЛС отношения РАП/Рс=3 необходима мощность передатчика уводящей помехи РАП равная нескольким мВт. Суммарная мощность передатчика уводящей помехи не будет превышать нескольких Вт, что упрощает его реализацию. Зададим мощность передатчика уводящей помехи 2 Вт.
Похожие работы
... целей, то вероятность правильного обнаружения снижается в 1.5 раза. 7. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон. Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств ...
... параметры обнаружения. Поскольку принимаемая пачка из N импульсов является когерентной, то . 2. Расчет параметров помехопостановщика 2.1 Расчет мощности передатчика заградительной и прицельной помех помеха помехозащита радиолокационная станция Можно выделить несколько основных типов передатчиков заградительных помех: прямошумовые передатчики; передатчики помех, использующие мощный ...
... на выходе над с/п на входе на значительную величину. 6. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств осуществляющих эту ...


... защиты от УП является введение в РЛС режима сопровождения слабого сигнала, при котором при воздействии ответной помехи (первый этап в постановке УП) продолжается сопровождение менее мощного сигнала от цели. 5. Анализ эффективности применения комплекса помех и средств помехозащиты При воздействии только пассивных помех с рассчитанными в пункте 4.1 параметрами отношение сигнал/помеха на входе ...
0 комментариев