Навигация
Анализ эффективности применения комплекса помех и средств помехозащиты
32109
знаков
0
таблиц
23
изображения
6. Анализ эффективности применения комплекса помех и средств помехозащиты
Мерой эффективности режекторного фильтра служит достигнутый, коэффициент подавления. В нашем случае он равен 37,68 дБ, т.е. пассивную помеху фильтр подавляет до уровня шумов. Таким образом, помеха практически полностью исключается из дальнейшей обработки. Однако надо заметить, что в месте с помехой будет режектирован также сигнал от малоскоростных целей и целей имеющих только тангенциальную составляющую скорости, летящих перпендикулярно направлению излучения РЛС.
Также критерием эффективности служит коэффициент улучшения отношения с/п, в спроектированном фильтре он составляет 20,02 дБ.
При расчете параметров помехопостановщика АШП был установлено, что при согласовании параметров АШП с параметрами РЛС дальность действия РЛС снижается в несколько раз, при этом, в случае применения противоборствующей стороной средств помехозащиты, возможно уменьшение влияния помех
Смена несущих частот и другие меры помехозащиты затрудняют согласование параметров помехи с РЛС. Если постановщик помех не будет успевать подстраивать свои параметры, то можно добиться полного исключения влияния помех на РЛС.
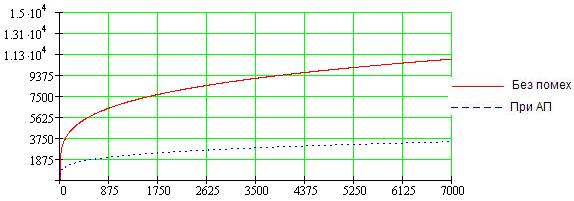
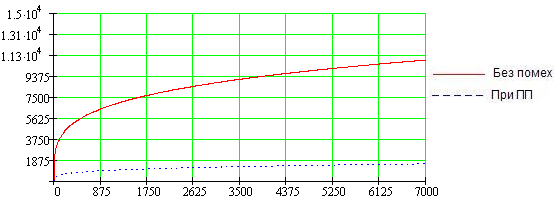
Действие уводящей помехи заключается в нарушение работы следящей системы по дальности, но при сравнении каналов дальности и скорости система селекции ложных целей имеет возможность выявить ложные цели. В нашем случае РЛС имеет лишь канал дальности, поэтому возможности для селекции помех ограничены (невозможно сравнить информацию канала дальности с каналом скорости). Из этого можно сделать вывод, что при излучении согласованных помех, РЛС не имеет возможности для качественной селекции ложных целей и вероятность поражения РЛС уводящими помехами довольно высока. Как уже говорилось, возможна селекция помех по уровню мощности, но опять же при излучении «качественной» помехи возможности селекции ограничены.
Вероятность выполнения РЛС своих задач в условиях постановки АШП и уводящих помех будет равна произведению вероятностей работы РЛС в отсутствии помех, вероятности работы РЛС в условиях постановки АШП, вероятности работы РЛС в условиях применения уводящей помехи. Если вероятность работы РЛС в отсутствии помехи равна 0,9, вероятность работы РЛС в случае применения АШП равна 0,5 (из приведенных ранее рассуждений ясно, что АШП сильно влияет на работу РЛС), вероятность работы РЛС в условиях применения уводящей помехи равна 0.5, то
![]() Видно, что выполнение РЛС своих задач, в условиях применения комплекса помех, почти невозможно.
Видно, что выполнение РЛС своих задач, в условиях применения комплекса помех, почти невозможно.
Не стоит забывать, что устройства постановки помех, так же как и устройства борьбы с ними, динамично развиваются. Чаще всего средства нападения оказываются «сильнее», а адекватные меры противодействия появляются лишь через некоторое время, поэтому оценить эффективность средств помехозашиты и помехопостановки затруднительно. Каждой конкретной ситуации будут соответствовать свои особенности, а исход «сражения» будет зависеть от способности каждой из систем к адаптации и эффективности применяемых алгоритмов. Применение в настоящее время систем не способных к адаптации является столь же «расточительным», как и применение некогерентной обработки в активной радиолокации.
7. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
Цифровые режекторные гребенчатые фильтры подавления помех требуют предварительного преобразования сигналов в цифровую форму с помощью АЦП. В таких устройствах производиться дискретизация по времени, с дискретом ![]() . Быстродействие АЦП определяется затратами на преобразование, которые должны быть меньше длительности временного дискрета
. Быстродействие АЦП определяется затратами на преобразование, которые должны быть меньше длительности временного дискрета ![]() , где m — число разрядов АЦП. Если быстродействия АЦП не хватает, то переходят к цифровым режекторным гребенчатым фильтрам в виде комплексных фильтров с двумя квадратурными каналами, в которых включены два АЦП.
, где m — число разрядов АЦП. Если быстродействия АЦП не хватает, то переходят к цифровым режекторным гребенчатым фильтрам в виде комплексных фильтров с двумя квадратурными каналами, в которых включены два АЦП.
При работе РЛС к системе обработки данных предъявляется требование реализации обработки данных в реальном масштабе времени. Оно является необходимым, поэтому вычислительная система должна обеспечивать решение этой задачи.
Для определения требований к вычислительной системе оценим общее число каналов РЛС, и, зная длительность зондирующего импульса, рассчитаем необходимое быстродействие системы (за время равное длительности зондирующего импульса система должна успевать обрабатывать все каналы).
Число каналов дальности: ![]() ,
,
![]() .
.
Число каналов по скорости равно числу импульсов в пачке, но так как определение скорости не входит в задачи проектируемой РЛС, то каналы по скорости не требуются.
Число каналов по угловым координатам ![]() .
.
Общее число каналов ![]() .
.
При разрешающей способности по дальности 100 м длительность импульса равна ![]() . За это время должно быть обработано 2900 каналов дальности (угловые каналы будут обрабатываться поочередно). Темп обработки
. За это время должно быть обработано 2900 каналов дальности (угловые каналы будут обрабатываться поочередно). Темп обработки ![]() операций в секунду. Если учесть, что под операцией понимается довольно сложный алгоритм действий, то станет ясно, что обеспечить такую скорость вычислений одним устройством, на сегодняшнем этапе развития вычислительной техники, невозможно. Для реализации такого количества вычислений необходимо использовать параллельную обработку, когда вычисления производятся не одним устройством, а несколькими. Это позволит снизить требования к вычислительным устройствам, но приведет к удорожанию системы.
операций в секунду. Если учесть, что под операцией понимается довольно сложный алгоритм действий, то станет ясно, что обеспечить такую скорость вычислений одним устройством, на сегодняшнем этапе развития вычислительной техники, невозможно. Для реализации такого количества вычислений необходимо использовать параллельную обработку, когда вычисления производятся не одним устройством, а несколькими. Это позволит снизить требования к вычислительным устройствам, но приведет к удорожанию системы.
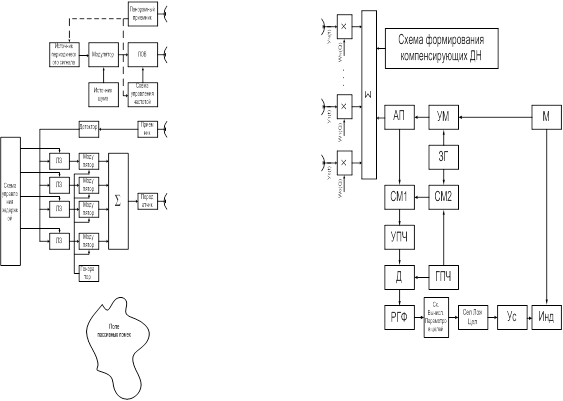
Схема формирования провалов ДН в направлении прихода АП должна успевать отслеживать изменяющуюся помеховую обстановку (если учесть, что постановщики помех чаще всего располагаются на борту ЛА, на больших расстояниях от РЛС, то, скорее всего, скорость изменения направления прихода АП не велика, что позволяет своевременно изменять параметры антенн).
Система селекции целей должна быть рассчитана на возможность применении уводящих помех и обеспечивать их селекцию без потерь реальных целей (вычислительная система должна быть многоканальной и быстродействующей, что затрудняет выполнение данного требования). Чаще всего применяют системы, рассчитанные на строго определенное число целей. Для РЛС дальнего обнаружения примем максимальное число целей равным 40.
Средства помехопастановки ПП должны иметь на борту аппаратуру для измерения длины волны излучаемых колебаний, для того, что бы выкидывать диполи требуемой длины.
Средства помехопостановки должны обеспечивать соответствующую скорость перестройки центральной частоты излучаемой помехи, чтобы эффективно отслеживать изменения параметров сигнала РЛС. Скорость перестройки постановщика помех должна быть больше максимальной скорости перестройки РЛС, кроме того, система постановки АП должна успевать оценивать параметры подавляемой РЛС. То есть «скоростные» требования, предъявляемые к постановщику помех, гораздо выше, чем подобные требования, предъявляемые к РЛС.
Если РЛС работает на одной частоте в течение Т=2с, то ПАП за это время должен успеть отследить изменение частоты (например 20% от Т) и перестроиться на новую частоту (например 30% от Т), тогда на подавление остается 50% от Т, в нашем случае это 1с. Чем медленнее ПАП оценивает параметры и чем медленнее перестраивается, тем больше времени РЛС работает беспрепятственно. В рассмотренном примере ПАП должен обеспечить измерение за 0,4с, перестройку за 0,6с. При увеличении скорости перестройки РЛС, скорость ПАП так же должна увеличиваться. Современные системы перестройки частоты позволяют перестраивать частоту до 128 раз в секунду и выше, ПАП должен перестраиваться со скоростью не меньше этой.
Постановщик уводящих помех требует наличия запоминающего устройства и управляемых линий задержки, что не составляет особых трудностей. Наиболее важен алгоритм формирования помехи и алгоритм «увода» РЛС вслед за ложной целью, который должен обеспечивать согласованность всех параметров помехи. «Основы» алгоритмов изложены выше, а каждой конкретной ситуации будут соответствовать свои особенности. Целесообразно иметь целый набор подобных алгоритмов.
8. Выбор и технико-экономическое обоснование технологической базы для реализации проекта
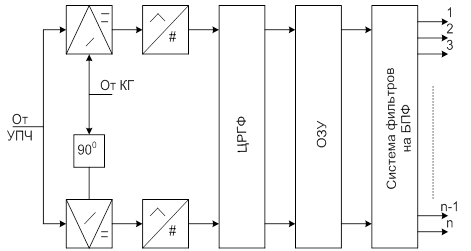
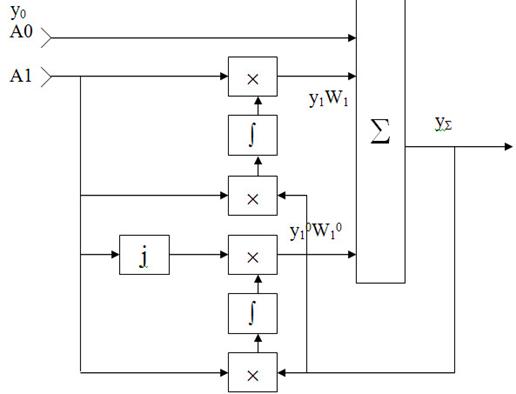
Реализация фильтровых устройств возможна на фильтрах с быстрым преобразованием Фурье (БПФ), или на микропроцессорах. Всё большую роль в цифровой обработке радиолокационной информации начинают играть программируемые логические интегральные микросхемы (ПЛИС), которые обладают гибкой структурой и возможностью смены программы, в отличие, например от микропроцессоров. Реализация типового фильтрового устройства обнаружителя движущихся целей (ОДЦ) многоканально по дальности и скорости. Каналы дальности реализуются либо с помощью селекторов дальности в УПЧ, либо с помощью коммутации ячеек ОЗУ. Каналы скорости образуются ЦФ с помощью БПФ. Селекторы дальности обеспечивают поступление в каждый из m каналов сигналов только с одного элемента разрешения по дальности. В цифровом фильтровом устройстве ОДЦ с подавлением помех информация в ЦРГФ записывается в оперативное запоминающее устройство(ОЗУ), а затем фильтруется на основе n-точечного, алгоритма БПФ. Структурная схема цифрового фильтрового устройства приведена ниже:
9. Составление структурной схемы устройства и описание ее работы
Из приведенных ранее рассуждений известно, что разрабатывается когерентная система. Ниже приведен один из возможных вариантов построения истинно когерентного радиолокатора высокой скважности.
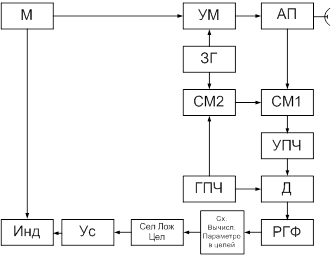
Передатчик построен по многокаскадному принципу. Стабильные колебания задающего генератора усиливаются в усилителе мощности. Одновременно в этом же каскаде происходит импульсная модуляция сигнала.
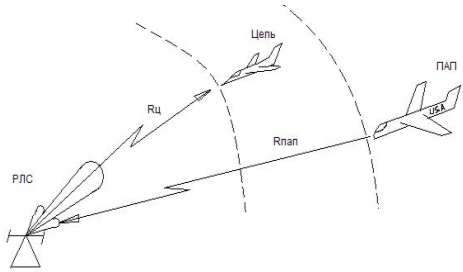
С помощью смесителя СМ2 на который подаются колебания задающего генератора и генератора промежуточной частоты, формируется гетеродинный сигнал, используемый для преобразования частоты принимаемых колебаний в смесителе СМ1. Усиленные в УПЧ сигналы сравниваются с опорным колебанием генератора промежуточной частоты на детекторе. Сигнал биений подается на режекторный фильтр, который осуществляет селекцию сигналов движущихся целей. После этого производится вычисление параметров целей, затем производится селекция ложных целей. После усиления в усилителе сигналы движущихся целей подаются на индикатор. Ниже приведена структурная схема, отображающая взаимодействие конфликтующих сторон.
10. Заключение
В ходе данной курсовой работы была освоена методика нахождения параметров РЛС с помощью программы «Стрела», а так же оценены возможности постановщиков различных помех и методы борьбы с ними. Определена структура средств помехопостановки и помехозащиты.
11. Библиографический список
1. Бакулев П. А.. Радиолокационные системы: Учебник для вузов. – М.: Радиотехника, 2004, 320 с., ил.
2. Финкельштейн М. И. Основы радиолокации: Учебник для вузов. – 2-е изд, перераб. и доп. – М.: Радио и связь, 1983. – 536 с., ил.
3. Попов Д. И. Проектирование радиолокационных систем: Учебное пособие, Рязань 1975.
4. Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970. Пер. с англ. (в четырех томах) под общей ред. К. Н. Трофимова. Том 1. Основы радиолокации. Под ред. Я. С. Ицхоки. М., «Сов. радио», 1976, 456 с.
5. Бакулев П. А. Радиолокация движущихся целей: Учебник для вузов. – М.: «Сов. радио», 1964, 336 с.
6. Радиолокационные устройства (теория и принципы построения) под ред. В. В. Григорина-Рябова: М., «Советское радио», 1970, стр. 680.
7. Основы системного проектирования радиолокационных систем и устройств: Методические указания по курсовому проектированию по дисциплине «Основы теории радиотехнических систем»: Рязан. гос. радиотехн. акад.; Сост.: В. И. Кошелев, В. А. Федоров, Н. Д. Шестаков. Рязань, 1995, 60 с.
Похожие работы
... целей, то вероятность правильного обнаружения снижается в 1.5 раза. 7. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон. Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств ...
... параметры обнаружения. Поскольку принимаемая пачка из N импульсов является когерентной, то . 2. Расчет параметров помехопостановщика 2.1 Расчет мощности передатчика заградительной и прицельной помех помеха помехозащита радиолокационная станция Можно выделить несколько основных типов передатчиков заградительных помех: прямошумовые передатчики; передатчики помех, использующие мощный ...
... на выходе над с/п на входе на значительную величину. 6. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств осуществляющих эту ...


... защиты от УП является введение в РЛС режима сопровождения слабого сигнала, при котором при воздействии ответной помехи (первый этап в постановке УП) продолжается сопровождение менее мощного сигнала от цели. 5. Анализ эффективности применения комплекса помех и средств помехозащиты При воздействии только пассивных помех с рассчитанными в пункте 4.1 параметрами отношение сигнал/помеха на входе ...
0 комментариев