Навигация
Расчет параметров средств помехозащиты
32109
знаков
0
таблиц
23
изображения
5. Расчет параметров средств помехозащиты
Для подавления пассивных помех, действующих на РЛС будет использован режекторный фильтр, а именно линейный режекторный фильтр с симметричными весовыми коэффициентами, который реализуем при помощи программы «Стрела».
Отношение шум/помеха на входе РЛС = -37,7дБ.
Режекторный фильтр должен подавлять помеху до уровня шумов, следовательно коэффициент подавления помехи должен составлять около 37,7дБ.
На первой закладке «Фильтр» выбираем:
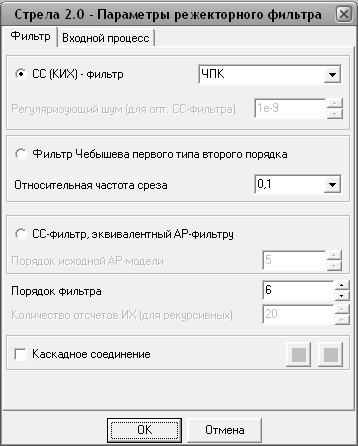
Тип фильтра СС(КИХ)-фильтр ЧПК. Порядок фильтра задаем так, что бы число импульсов в пачке было не меньше, чем порядок фильтра +1.
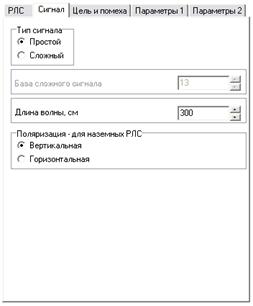
На второй закладке «Входной процесс» выбираем:
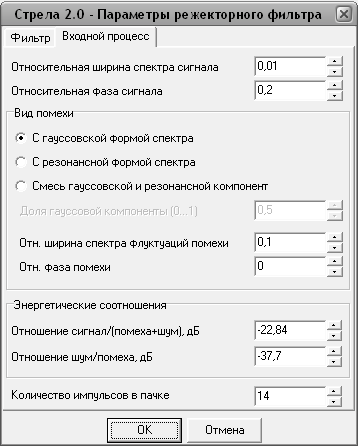
Относительную ширину спектра сигнала: 0,01.
Относительную фазу сигнала: 0,2.
Вид помехи: с гауссовской формой спектра.
Относительную ширину спектра флуктуаций помехи: 0,1.
Относительную фазу помехи: 0,2.
Отношение с/(п+ш): -22,84 дБ.
Отношение ш/п: -37,7 дБ.
Количество импульсов в пачке 14.
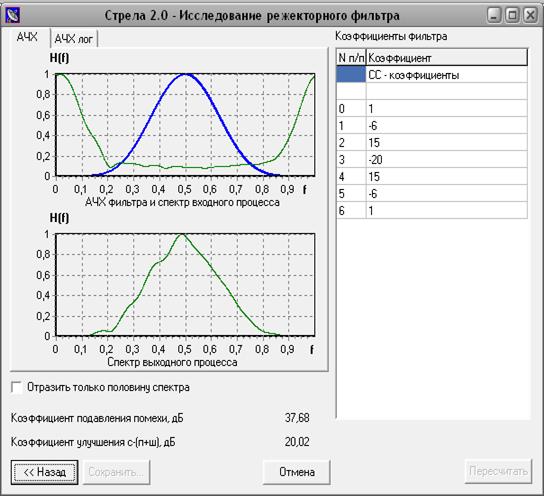
Программа посчитала, что коэффициент подавления помехи равен 37,68 дБ, что приемлемо, так как далее будет использоваться накопление сигнала. Симметричность коэффициентов относительно центрального будет обеспечивать линейность ФЧХ фильтра.
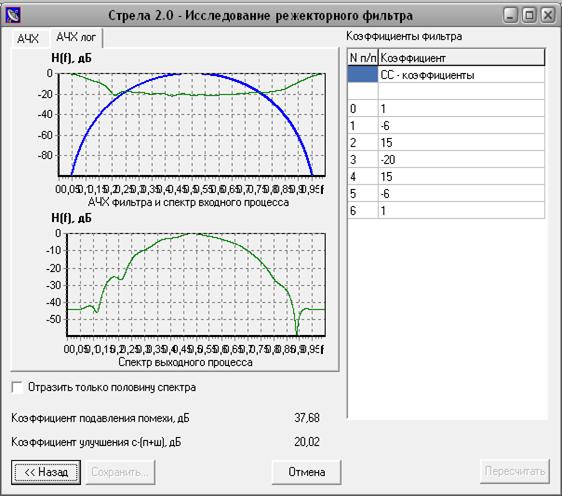
АЧХ и ЛАЧХ приведены ниже:
Структурная схема цифрового режекторного фильтра, приведена ниже:
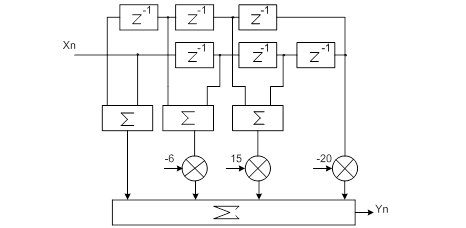
Для нормальной работы фильтра необходимо, чтобы на его вход поступало не менее N отсчетов, (где N порядок режекторного фильтра). Посредством остальных 14-6=8 отсчетов можно произвести когерентное накопление.
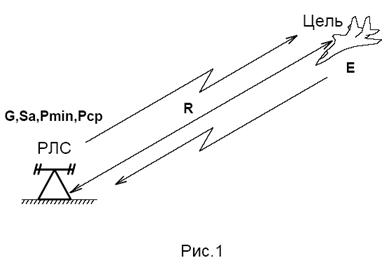
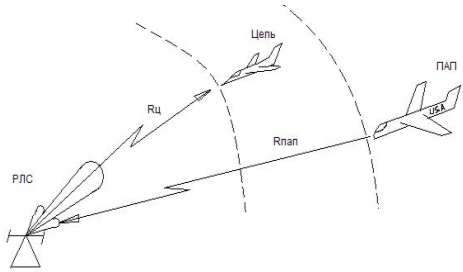
На антенну РЛС поступают активные помехи, полезный сигнал и шум, где они смешиваются, образуя входную реализацию. При взаимодействии АП и полезного сигнала происходит полное или частичное их совпадение во времени, перекрытие по частоте и различие в направлении прихода радиоволн.
Алгоритм обработки сигналов АП разделяют на два этапа: пространственный и временной. С помощью пространственного фильтра производится обработка сигнала в пространстве. Фильтр осуществляется соответствующим построением антенной системы. Далее идет временная обработка сигнала.
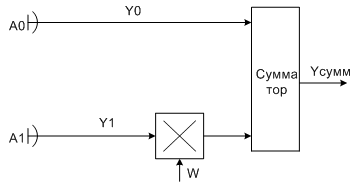
Один из алгоритмов пространственного подавления помех основан на использовании адаптивных ФАР (в канале обработке каждого элемента ФАР необходим весовой усилитель или аттенюатор и фазовращатель для настройки на заданное направление приема сигнала). ФАР позволяет производить электрическое управление сканирования луча, формировать несколько лучей, быстро перемещать луч ДН. Однако использование ФАР требует существенного усложнения антенной системы за счет введения дополнительных элементов, поэтому для системы помехозащиты выберем устройство подавления с деформацией ДН антенны, которое позволяет сформировать провал диаграммы направленности в направлении на источник помех (для этого требуется дополнительная антенна). Структурная схема устройства формирования провала ДН антенны приведена ниже:
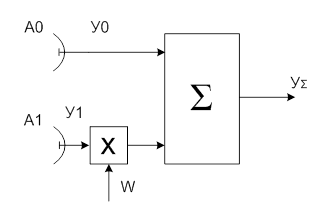
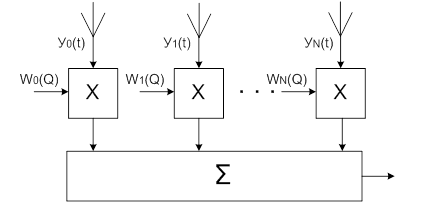
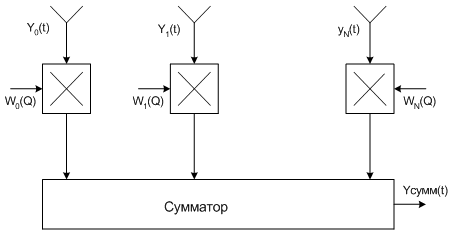
Исходные ДН основной и компенсационной антенн f0(Q), f1(Q). Результирующая ДН антенной системы fΣ(Q)= f0(Q)+Wf1(Q). Если Q1 – угол прихода помехи, то для компенсации необходимо выполнение условия fΣ(Q1)=0, откуда W= - f0(Q1) /f1(Q1). Подставив W в формулу fΣ(Q), получим fΣ(Q)= f0(Q)-[f0(Q1) /f1(Q1)]f1(Q). Таким образом, в направлении на источник помехи образуется провал в ДН антенны. Если помехи действуют с различных направлений, то необходимо применение нескольких компенсирующих антенн. Структурная схема устройства пространственной обработки для подавления нескольких пространственных помех приведена ниже.
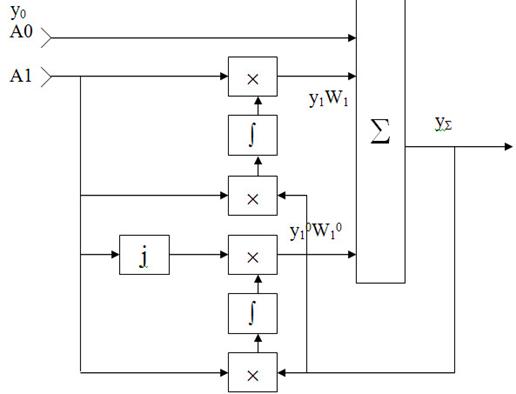
Во временной области возможно применение устройства компенсации помех с корреляционными обратными связями. Основная антенна принимает помеху, а компенсационная антенна принимает помеху от того же источника, отличающуюся по фазе. Используя сигналы этих каналов, можно сформировать компенсатор с корреляционными обратными связями, в котором компенсируется помеха. Такое устройство обеспечивает минимум среднего квадрата напряжения помехи на выходе фильтра. Коэффициенты фильтра должны вычисляться в режиме реального времени, для наиболее эффективного подавления помехи. Структурная схема фильтра приведена ниже.
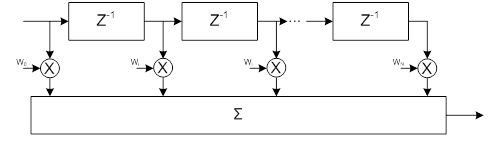
Если порядок фильтра (N) равен 5, то 6 импульсов пачки потребуется на завершение переходного процесса, оставшиеся 8 импульсов можно использовать для накопления.
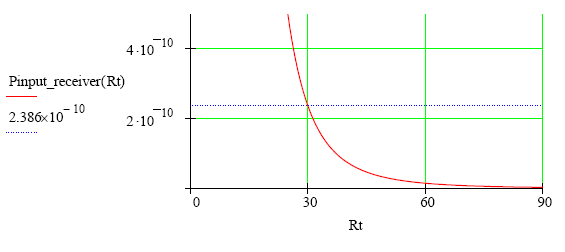
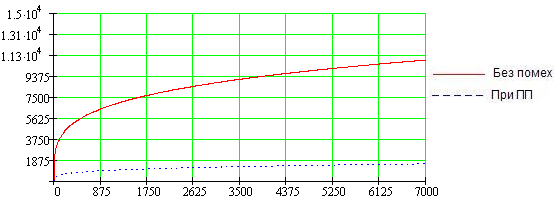
Если помеху не удается отфильтровать, то можно увеличить дальность действия РЛС за счет увеличения времени накопления сигнала (увеличения числа импульсов в принимаемой пачке). Но так как зависимость между дальностью действия РЛС и временем накопления «слабая» (R~![]() ), возможности увеличения дальности действия РЛС за счет увеличения числа импульсов пачке сильно ограничены. Для увеличения дальности действия в 2 раза необходимо увеличить число импульсов в 16 раз (при когерентном накоплении). Кроме того, возможно увеличение дальности действия РЛС за счет увеличения КНД антенны или увеличения мощности передатчика, но это сопряжено с большими трудностями (проще изготовить новую РЛС, чем увеличить мощность старой, увеличение КНД требует изготовления новой антенной системы) поэтому на практике не применяется.
), возможности увеличения дальности действия РЛС за счет увеличения числа импульсов пачке сильно ограничены. Для увеличения дальности действия в 2 раза необходимо увеличить число импульсов в 16 раз (при когерентном накоплении). Кроме того, возможно увеличение дальности действия РЛС за счет увеличения КНД антенны или увеличения мощности передатчика, но это сопряжено с большими трудностями (проще изготовить новую РЛС, чем увеличить мощность старой, увеличение КНД требует изготовления новой антенной системы) поэтому на практике не применяется.
Кроме того, для борьбы РЛС с АШП можно использовать следующие приемы:
1. Работа РЛС в короткие промежутки времени
2. Смена несущих частот.
3. Применение многочастотных РЛС.
4. Использование сложных сигналов.
5. Использование длительного когерентного накопления.
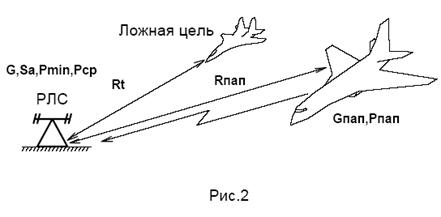
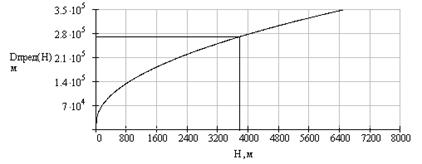
Для селекции уводящих помех применим алгоритм, основанный на сравнении скорости, полученной из канала дальности косвенным методом, с порогом скорости l0(максимально возможной скоростью летательного аппарата плюс небольшой запас на погрешность измерения).
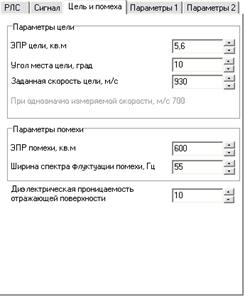
![]()
В техническом задании указана максимально возможная скорость летательного аппарата 910 м/с, при погрешности вычисления скорости ±10% зададим порог скорости l0 на уровне 1000 м/с.
Для каждой цели должно проводиться вычисление скорости и сравнение ее с порогом. В случае превышения порога цель необходимо классифицировать как ложную, должен производиться срыв слежения.
Похожие работы
... целей, то вероятность правильного обнаружения снижается в 1.5 раза. 7. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон. Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств ...
... параметры обнаружения. Поскольку принимаемая пачка из N импульсов является когерентной, то . 2. Расчет параметров помехопостановщика 2.1 Расчет мощности передатчика заградительной и прицельной помех помеха помехозащита радиолокационная станция Можно выделить несколько основных типов передатчиков заградительных помех: прямошумовые передатчики; передатчики помех, использующие мощный ...
... на выходе над с/п на входе на значительную величину. 6. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств осуществляющих эту ...


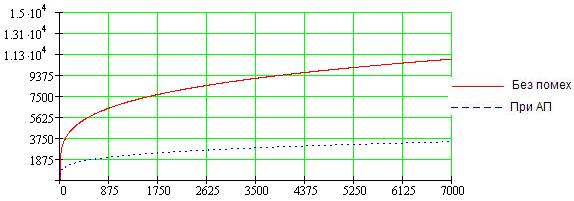
... защиты от УП является введение в РЛС режима сопровождения слабого сигнала, при котором при воздействии ответной помехи (первый этап в постановке УП) продолжается сопровождение менее мощного сигнала от цели. 5. Анализ эффективности применения комплекса помех и средств помехозащиты При воздействии только пассивных помех с рассчитанными в пункте 4.1 параметрами отношение сигнал/помеха на входе ...
0 комментариев