Навигация
dм = ![]() , где
, где ![]() мм – суммарный зазор между роликами.
мм – суммарный зазор между роликами.
dм = ![]() = 54,62 мм;
= 54,62 мм;
![]() ,
,
тогда по таблице находим fc = 7,98;
Грузоподъёмность равна:
C = 7,98*(1*14*1)![]() *17
*17![]() *10
*10![]() = 7118,94 кгс = 71189,4 Н.
= 7118,94 кгс = 71189,4 Н.
Находим эквивалентную динамическую нагрузку:
Ра = (Х*Fr+ Y*Fa)*Кб*Кт , (y*Fa=0, Х=1),
где Кб – коэффициент безопасности Кб = 1,2;
Кт – температурный коэффициент Кт = 1;
Fr – радиальная сила Fr= Ft.
Р = 1*5990*1,2*1 = 7188Н.
Видно, что грузоподъёмность в несколько раз превышает нагрузку, поэтому данные ролики обеспечат вполне нормальную работу вращения сателлита.
L=(C/P)P=(71189.4/7188)10/3=2086.2 млн. об.
P-для роликов принимаем равным 10/3.
Lh=![]() 34770.13 ч
34770.13 ч
2) Для сателлита z5:
Возьмём такие же ролики, как и в первой ступени, то есть 10![]() 14.
14.
Расчет динамической грузоподъёмности аналогичен, то есть
С = 71189.4 Н.
Эквивалентная динамическая нагрузка равна:
Ра = Х*Fr*Кб*Кт = 1*9621.3*1,2*1 = 11545.56 Н,
L=(C/P)P=(71189.4/11545)10/3=429.94 млн. об.
Lh=![]() 7165.61 ч
7165.61 ч
ресурс работы роликов больше 7000 часов, следовательно они обеспечивают нормальную работу вращения сателлита.
Расчет основного вала винта ТВД
1)Проектировочный расчет:
Данный вал нагружается изгибающим, крутящим и гироскопическим моментами.
Влияние сжимающих и растягивающих сил мало и поэтому не учитывается. Расчет ведем по формуле:
d =  ,
,
где Мкр = 9550*![]() = 13179 Нм,
= 13179 Нм,
[![]() ] = 70*106
] = 70*106![]() ,
, ![]()
d =  113,8 мм.
113,8 мм.
Принимаем ближайший рекомендуемый: dв = 80 мм.
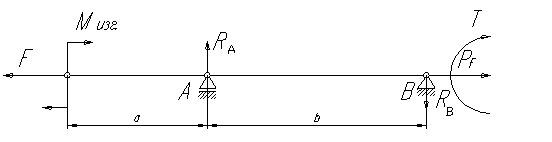
2)Проверочный расчет:
Для расчета валов определяем реакции в опорах и строим эпюры изгибающих и крутящих моментов.
Расстояния между опорами вала назначаем по прототипу в долях от диаметра вала.
Но первоначально определяем усилия, действующие на вал:
1)максимальный вращающий момент;
2)сила тяги винта F, растягивающая вал. Максимальное значение силы тяги, при работе винта на старте определяют из выражения:
F=![]() ,
,
где Рдв – мощность двигателя, кВт; ![]() в=
в=![]() - КПД винта;
- КПД винта; ![]() - скорость полета самолета (
- скорость полета самолета (![]() =
=![]()
![]() );
);
3)вес винта G, который берем из технических данных и для учета сил инерции умножаем на коэффициент перегрузки силовой установки n1=![]() ;
;
4)центробежная сила неуравновешенных масс винта Fц.б , которой обычно пренебрегают вследствие ее малости по сравнению с другими силами;
5)гироскопический момент Мг , возникающий при эволюциях самолета, когда изменяется направление оси вращения винта.
Для винтов с тремя и более лопастями максимальный гироскопический момент вычисляют по формуле:
Мг max= ![]() ,
,
где ![]() - угловая скорость вращения ротора в пространстве:
- угловая скорость вращения ротора в пространстве:
![]() =
=![]()
![]() - средняя угловая скорость вращения самолета в пространстве. Здесь n2 – коэффициент перегрузки (для пассажирских самолетов: n2 =
- средняя угловая скорость вращения самолета в пространстве. Здесь n2 – коэффициент перегрузки (для пассажирских самолетов: n2 =![]() );
);
![]()
![]() - скорость полета самолета при эволюции,
- скорость полета самолета при эволюции, ![]() , g=9,8
, g=9,8 ![]() – ускорение свободного падения;
– ускорение свободного падения; ![]() - угол поворота винта, отсчитываемый от плоскости вращения самолета (изменяется от 0 до 180о);
- угол поворота винта, отсчитываемый от плоскости вращения самолета (изменяется от 0 до 180о); ![]() - угол между осями вращения винта и самолета.
- угол между осями вращения винта и самолета.
При ![]() гироскопический момент имеет максимальное значение.
гироскопический момент имеет максимальное значение.
![]() - момент инерции винта, может быть найден через массу и радиус инерции по формуле:
- момент инерции винта, может быть найден через массу и радиус инерции по формуле: ![]() =m*r2 . Радиус инерции определяют через наибольший радиус лопасти: r=
=m*r2 . Радиус инерции определяют через наибольший радиус лопасти: r=![]() . Коэффициент
. Коэффициент ![]() для дюралюминиевых лопастей можно принять равным
для дюралюминиевых лопастей можно принять равным ![]() .
.
Находим эти значения:
F=![]() Н;
Н;
G=200*g=2000, G*n1=2000*5=10000 Н;
R=1м; ![]() , r=0.4
, r=0.4![]() *1=0.4 м.
*1=0.4 м.
I=200*0.42=32 кг*м2;
![]() ;
;
![]() Мг=32*104,67*0,03= 100,48 Нм;
Мг=32*104,67*0,03= 100,48 Нм;
Tmax=Т1+Т2=2233224+797580=3030,804 Нм;
Ткр1=Ft3*k*![]() =5990*3*
=5990*3*![]() =2345,085 Нм;
=2345,085 Нм;
Ткр2= Ft3*k*![]() =5990*3*
=5990*3*![]() =808,69 Нм;
=808,69 Нм;
Расстояния вала между опорами равны:
а=![]() =0,8; в=
=0,8; в=![]() =1,21;
=1,21;
Определим реакции в опорах.
Вокруг точки А (по часовой стрелке момент считаем положительным):
-G*a+Mг+Rв=0;
Rв=![]() =6528,53 Н;
=6528,53 Н;
Вокруг точки B (по часовой стрелке момент считаем положительным):
Ra*в-G(a+в)+МГ=0;
Ra=![]() =16528.53 Н;
=16528.53 Н;
Строим эпюры нагружения моментами вала:
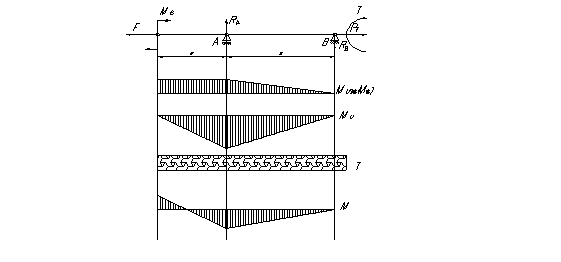
Мu=МГ-G*a=100.48-8000=[7899,52] Нм;
Проверка: ![]() ;
;
W=![]() =115.91*10-6;
=115.91*10-6;
![]() =68,152*106 Па =68 МПа , [
=68,152*106 Па =68 МПа , [![]() ]=190 МПа;
]=190 МПа;
Вал выдерживает, так как коэффициент запаса прочности равен:
k=![]() =2.79.
=2.79.
Расчет и выбор подшипников
Подшипники служат опорами для валов вращающихся осей. Они воспринимают радиальные и осевые нагрузки, приложенные к валу и передают их на раму машины. От их качества в значительной мере зависит работоспособность и долговечность машин.
Задняя опора водила и колесо закреплены и вращается посредством шарикового подшипника, который мало нагружен и по этому он не рассчитывается, а просто подбирается по диаметру вала.
Задняя опора основного вала воспринимает осевую , радиальную силу и гироскопический момент. Поэтому здесь используют шариковый четырехточечный подшипник (радиально упорный).
Проверка на долговечность:
![]()
![]()
С=87100 – динамическая грузоподъемность;
Коэффициенты: Х=0,41; V=1,0; Y=0,87; Кб=1,2; Кт=1.
Fr – радиальная реакции в данной опоре;
Fa- осевая реакция в опоре;
p=3, для шариковых подшипников.
L=![]() =16,468;
=16,468;
В часах работы получим:
L=
Похожие работы
... в предпочтительном ряду модулей конических зубчатых колес по табл. 4 Предпочтительный ряд модулей для конических зубчатых колес Таблица 4 1 ряд 2 2,5 3,0 4,0 5,0 6,0 8,0 10 12 16 20 25 2 ряд 2,25 2,75 3,5 4,5 5,5 7,0 9,0 11 14 18 22 3. ПРОВЕРОЧНЫЙ РАСЧЕТ ПЕРЕДАЧ НА ПЭВМ 3.1 Подготовка исходных данных Программа позволяет выполнять одновременно расчет от одной до пяти ...
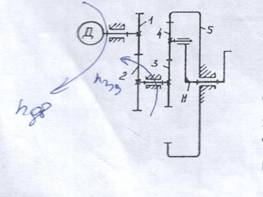
... стороны с частотой, меньшей в 6,667 раза частоты вращения ротора турбины винтовентилятора. На передний винтовентилятор передается 57,86% мощности турбины, на задний 42,14% при равных частотах вращения винтовентиляторов. Редуктор однорядный планетарный дифференциального типа, расположен в передней части двигателя. Редуктор состоит из корпуса 25 сателлитов, пяти сателлитов 12, венца (колеса ...

... φу=100 град; φдс=40 град; φв=70 град; Ход толкателя кулачкового механизма h=74мм; Эксцентриситет e =28 мм; Тип диаграммы 2 1 СИНТЕЗ ЗУБЧАСТОГО РЕДУКТОРА 1.1 Расчет геометрических параметров зубчатой передачи 1-2 Проектируем зацепление со смещением 1 – 2. Основними исходными данными ...
... е. число неизвестных параметров реакций должно быть равно количеству уравнений статики, которые можно составить для их определения. Начинать силовой анализ необходимо с наиболее удаленной от ведущего звена структурной группы. 3.1 Определение реакций в кинематических парах структурных групп Чтобы определить величины и направления сил инерции, надо знать ускорения и массы звеньев. Ускорения ...
0 комментариев