Навигация
Проектирование зубчатого и кулачкового механизмов
17004
знака
6
таблиц
7
изображений
РЕФЕРАТ
Курсовой проект: 32 с, 6 таблиц, 3 приложения на листах формата А1.
Объект проектирования и исследования – механизм: зубчатый, кулачковый.
Цель курсового проекта исследовать и спроектировать зубчатый и кулачковый механизм.
В проекте сделано: синтез планетарной передачи и эвольвентного зубчатого зацепления с угловой коррекцией, синтез кулачкового механизма с вращательным движением толкателя.
В главной части сделаны необходимые расчеты для исследования зубчатого и кулачкового механизма по которым было построено черчение составных частей данного механизма.
СОДЕРЖАНИЕ
Введение
1 Кинематическое исследование рычажного механизма
1.1 Построение плана механизма
1.2 Построение плана скоростей
1.3 Построение плана ускорения
1.4 Определение сил реакции и моментов сил инерции с использованием Метода Бруевича
1.5 Определение сил реакции и моментов сил инерции с использованием Метода Жуковского
2 Синтез зубчатого редуктора
2.1 Расчет геометрических параметров зубчатой передачи 1-2
2.2 Проверка качества зубьев и зацепления
2.3 Расчет контрольных размеров
2.4 Подбор чисел зубьев планетарного механизма
2.5 Кинетический анализ планетарного механизма
3 Синтез кулачкового механизма с вращательным движением
3.1 Расчет законов движения толкателя
3.2 Построение теоретического и действительного профиля кулачка
Выводы
Перечень ссылок
Приложение А
Приложение В
Приложение С
ВВЕДЕНИЕ
Целью этого курсового проекта является получение студентами навыков в проектировании комплексных механизмов, тоесть таких, которые состоят с нескольких частей. В этой работе таким механизмом является привод конвеера, который состоит из рычажного, зубчатого механизмов и кулачкового механизмов.
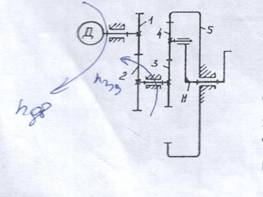
Рис.1 Кинематическая схема редуктора

Рис.2 Кинематическая схема стержневого механизма
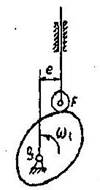
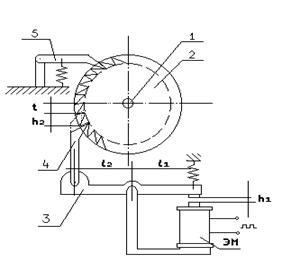
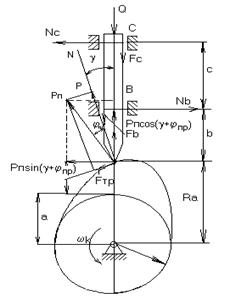
Рис.3 Схема кулачкового механизма
Исходные данные
Частота вращение двигателя
![]() =1080 об/хв
=1080 об/хв
Частота Вращения главного вала
![]() =92 об/хв
=92 об/хв
Модуль колёс зубчатого механизма m = 6 мм
Количество сателитов k =3
Количество зубьев колес: 1, 2 ![]() = 14; z2 = 30
= 14; z2 = 30
Фазовые углы вращения кулачкового механизма φу=100 град;
φдс=40 град;
φв=70 град;
Ход толкателя кулачкового механизма h=74мм;
Эксцентриситет e =28 мм;
Тип диаграммы 21 СИНТЕЗ ЗУБЧАСТОГО РЕДУКТОРА
1.1 Расчет геометрических параметров зубчатой передачи 1-2
Проектируем зацепление со смещением 1 – 2. Основними исходными данными при проектировании зубчатых передач является расчетный модуль m=6мм, и числа зубьев колес z1 = 14, z2 = 30. Параметры исходного контура коэффициент высоты головки h*a=1,0; коэффициент радиального зазора c*=0,25; угол профиля исходного контура α=20°.
Коэффициент смещения исходного контура для первого и второго колеса
Х1 = 0,536 та Х2 = ХΣ - Х1 = 0,976 – 0,536 = 0,44 (выбираются согласно от чисел зубьев колёс z1 та z2).
Рассчитываем параметры для неравносмещенного зацепления.
Шаг по делительной окружности:
p = π∙m = 3,1416∙6 = 18,85 мм.
Радиусы делительных окружностей:
r1=0,5∙m∙z1=0,5∙6∙14=42 мм;
r2=0,5∙m∙z2=0,5∙6∙30=90 мм.
Радиусы основных окружностей:
rb1=r1∙cosα=42∙0,93969=39,467 мм;
rb2=r2∙cosα=90∙0,93969=84,572 мм.
Шаг по основной окружности:
pb = p∙cosα=18,85 ∙0,93969=17,713 мм.
Угол зацепления:
inv αw = ![]() + inv α = 0,031052;
+ inv α = 0,031052;
α = αw= 25,278°;
Радиусы начальных окружностей:
rw1= 0,5∙ m∙z1∙ = 0,5∙6∙14∙1,0392=43,646 мм;
= 0,5∙6∙14∙1,0392=43,646 мм;
rw2= 0,5∙ m∙z2∙![]() = 0,5∙6∙30∙1,0392= 93,528 мм.
= 0,5∙6∙30∙1,0392= 93,528 мм.
Межосевое расстояние:
aw = rw1 + rw2 =43,646 +93,528=137,174 мм.
Радиусы окружности впадин:
rf1 = m∙ (0,5∙z1 – h*a – c*) = 6 ∙ (0,5∙14 – 1,0 – 0,25)= 37,716 мм;
rf2 = m∙ (0,5∙z1 – h*a – c*) = 6∙ (0,5∙30 – 1,0 – 0,25) = 85,140 мм.
Высота зуба определяется с условием, что в неравносмещенном и нулевом зацеплениях радиальный зазор равняется с*∙m. Тогда:
h = aw – rf1 – rf2 - с*∙m =137,174 –37,716 – 85,140 – 0,25∙6 = 12,818 мм;
Радиусы окружности вершин:
ra1 = rf1 + h = 37,716 +12,818 =50,534 мм;
ra2= rf2 + h = 85,140 +12,818 = 97,958 мм.
Толщины зубьев по делительным окружностям:
S1=m∙ (0,5∙π+2∙x1∙tgα)=6∙ (0,5∙3,1416+2∙0,536 ∙0,9396) = 11,766 мм;
S2= m∙ (0,5∙π+2∙x2∙tgα)= 5∙ (0,5∙3,14162+2∙0,44 ∙0,9396 )= 11,347 мм.
Толщины зубьев по основным окружностям:
Sb1 = 2∙rb1∙ ( ) = 2∙39,467 ∙ (
) = 2∙39,467 ∙ (![]() )= 12,233 мм;
)= 12,233 мм;
Sb2 = 2∙rb2∙ ( ) = 2∙84,572 ∙ (
) = 2∙84,572 ∙ (![]() )=13,183 мм.
)=13,183 мм.
Толщины зубьев по начальным окружностям:
Sw1 = 2∙rw1∙ (![]() -inv αw)=2∙43,646 ∙(
-inv αw)=2∙43,646 ∙(![]() –
–![]() )=
)=
= 10,817 мм;
Sw2=2∙rw2∙(![]() -inv αw)=2∙93,528 ∙(
-inv αw)=2∙93,528 ∙(![]() –
–![]() )=
)=
=8,771 мм.
Шаг по начальной окружности:
![]() мм.
мм.
Необходимо проверить, выполняется ли равенство: Sw1+Sw2 = Pw.
Допускается погрешность ∆≤0,02 мм.
Sw1+ Sw2=10,817 +8,771 =![]() мм.
мм.
Имеем погрешность ∆=0 мм.
Толщина зубьев по окружностям вершин:
Sa1=2∙ra1∙( - inv αa)
- inv αa)
Угол профиля на окружностях вершин αa определяется по фомуле:
 ;
;
![]()
αa1 = 38,647 ; inv αa1=0,125120;
Sa1=2∙ra1∙ (- inv αa1)=2∙![]() ∙(
∙( ![]() 0,125120)
0,125120)
= 3,017 мм
![]()
αa2=30,305; inv αa2=0,0555546;
Sa2=2∙ra2∙(![]() - inv αa2)=2∙
- inv αa2)=2∙![]() ∙(
∙( ![]() ) = 4,388 мм.
) = 4,388 мм.
Коэффициент перекрытия:

Радиус кривизны эвольвенты в точке В1:
ρa1=N1B1=![]() 31,56 мм
31,56 мм
ρa2=N2B2=![]() 49,429 мм
49,429 мм
Длина линии зацепления:
N1N2=aw∙sinαw=![]() ∙
∙![]() =58,573 мм.
=58,573 мм.
Результаты расчетов заносят в табл. 2.1
Таблица 1.1 – Расчетные параметры нулевого и неравносмещенного зацепления
| Параметры | Тип зацепления |
| |
| Нулевое зацепление | Неравносмещенное зацепление |
| |
| z1 | 14 | 14 |
|
| z2 | 30 | 30 |
|
| m,мм | 6 | 6 |
|
| P, мм | 18,85 | 18,85 |
|
| Pb, мм | 17,713 | 17,713 |
|
| r1, мм | 42 | 42 |
|
| r2, мм | 90 | 90 |
|
| rb1, мм | 39,467 | 39,467 |
|
| rb2, мм | 84,572 | 84,572 |
|
| X1, мм | 0 | 0,536 |
|
| X2, мм | 0 | 0,44 |
|
| αw,град | 20 | 25,278 |
|
| rw1, мм | 42 | 43,646 |
|
| rw2, мм | 90 | 93,528 |
|
| aw, мм | 132 | 137,174 |
|
| Pw, мм | 18,85 | 19,588 |
|
| rf1, мм | 34,5 | 37,716 |
|
| rf2, мм | 82,5 | 85,14 |
|
| h, мм | 13,5 | 12,818 |
|
| ra1, мм | 48 | 50,534 |
|
| ra2, мм | 96 | 97,958 |
|
| S1, мм | 9,425 | 11,766 |
|
| S2, мм | 9,425 | 11,347 |
|
| Sw1, мм | 9,425 | 10,817 |
|
| Sw2, мм | 9,425 | 8,771 |
|
| Sb1, мм | 10,033 | 12,233 |
|
| Sb2, мм | 11,377 | 13,183 | |
| Sa1, мм | 3,876 | 3,017 | |
| Sa2, мм | 4,424 | 4,338 | |
| ε | 1,558 | 1,265 | |
Похожие работы

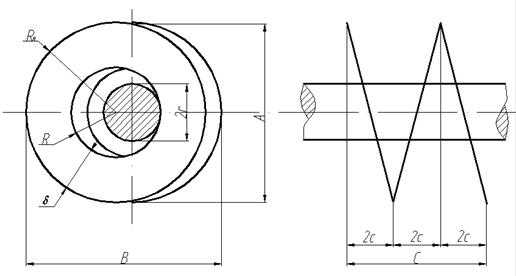
... проводят окружности радиусом rр и по внутренней огибающей этих окружностей проводят линию, которая является практическим профилем кулачка. 1.5 Расчет толщины кулачка Для нормальной работы кулачкового механизма необходимо выполнения условия контактной прочности: , где F – сила взаимодействия толкателя и кулачка [Н]; b – толщина кулачка [мм]; - приведенный модуль упругости; - ...
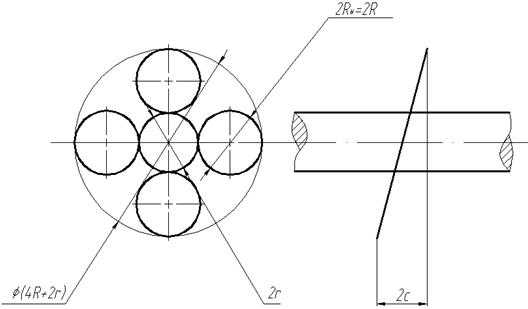
... , привода кинематической передачи и кулачкового механизма. Толкатель кулачкового механизма соединяется с исполнительным элементом системы управления движением летательного аппарата. Входной величиной программного механизма является число импульсов, подаваемых на шаговый электродвигатель, выполненный из электромагнита, храпового колеса, толкающей и стопорной собачек, а выходной – прямолинейное ...
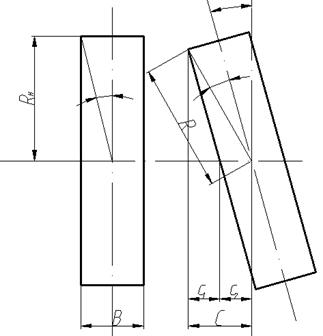
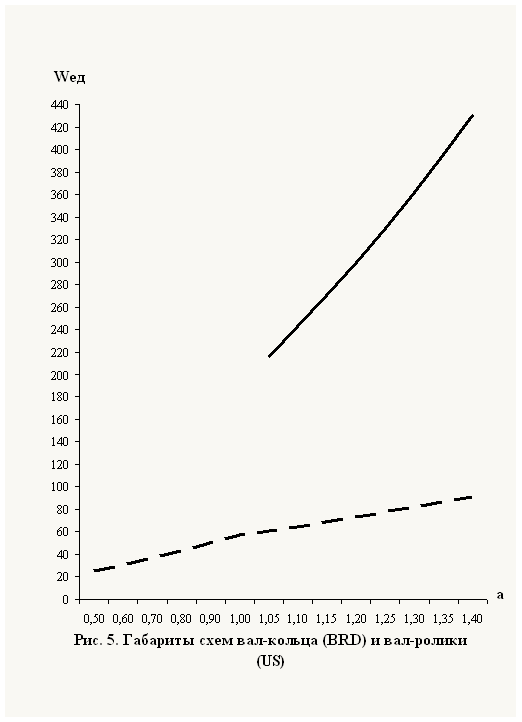
... механизмов, результаты вычисления сводим в табл. 1 и строим графики на рис. 5. Таблица 1. Вычисление габаритов схем валикокольцевых механизмов (ВКМ) a 0,50 0,60 0,70 0,80 0,90 1,00 1,05 1,10 1,15 1,20 1,25 1,30 1,35 1,40 - - - - - - 216,72 242,88 270,48 299,52 330 361,92 395,28 430,08 25,12 ...
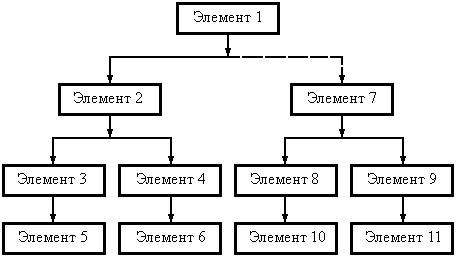
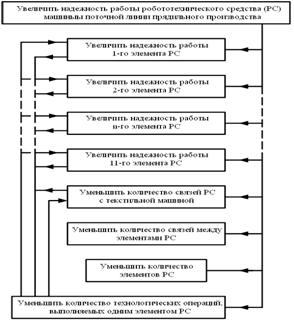
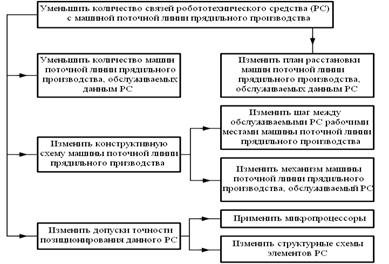
... , , . Произведем оценку числа возможных вариантов, которые можно синтезировать на основе морфологической матрицы при наложении на нее граничных условий проектирования, а именно исключения вышеперечисленных вариантов: Для всего PC машины поточной линии прядильного производства оценка полных решений может быть проведена по следующей формуле: , где – количество исполнительных механизмов в ...
0 комментариев