Навигация
Результаты ездовых испытаний передвижной лаборатории на полигоне ГУП «НИЦИАМТ»
42758
знаков
1
таблица
28
изображений
2. Результаты ездовых испытаний передвижной лаборатории на полигоне ГУП «НИЦИАМТ»
Комплекс дорожных испытаний проводился под руководством автора на автополигоне ГУП «Научно-исследовательский центр по испытаниям и доводке автомототехники» (НИЦИАМТ) РФ в апреле 2004 года (г. Дмитров). Целью проведения испытаний являлась оценка влияния изменения технического состояния АТС в эксплуатации на показатели основных эксплуатационных свойств, определяющих безопасность дорожного движения на примере маршрутного такси «Газель» в штатных и нештатных режимах движения. Объектом испытания стала научно-исследовательская учебная лаборатория на базе автомобиля ГАЗ-2705 (рис. 10).

Рис. 10. Научно-исследовательская учебная лаборатория на базе автомобиля ГАЗ-2705 в испытании «переставка»
Для определения параметров движения данное АТС было оборудовано двумя комплексами специальной измерительно-регистрирующей аппаратуры.
Первый комплекс разработан на кафедре «Автосервис, организация и безопасность движения» ЮРГУЭС под научным руководством зав. кафедрой к.т.н. Русакова В.З., преподавателями кафедры Юршиным Ю.Г., Шеметом Б.И. и Бондаревым И.В. совместно с научными консультантами МАДИ (ГТУ) д.т.н. Рябчинским А.И., д.т.н. Юрчевским А.А. и к.т.н. Додоновым Б.М. Он представляет собой комплект приборов и датчиков, согласованных для обработки с помощью аналогово-цифрового преобразователя (АЦП) сигналов и регистрируемых с помощью портативного персонального компьютера (ПК) (рис. 11). Инженером Сивоконь В.К. разработан уникальный блок питания первого комплекса.

Рис. 11. Измерительно-регистрирующий комплекс ЮРГУЭС
Второй комплекс разработан ГУП НПО «Спецтехника и связь» МВД РФ для регистрации параметров движения (УРПД), т.н. «черный ящик» автомобиля (рис. 12).

Рис. 12. Автомобильный «черный ящик» (УРПД)
Для регистрации углов поворота рулевого колеса (РК) и управляемых колес (УК) применяются поворотные датчики потенциометрического типа первого комплекса с линейной характеристикой (рис. 13). При этом УРПД второго комплекса фиксирует факт поворота РК на угол более 5° в какую-либо сторону от нейтрального положения.
Измерение продольных и поперечных ускорений первым комплексом производится акселерометрами типа ПЛ-95 (рис. 14). В УРПД второго комплекса регистрация этих параметров осуществляется по трем координатным осям собственными датчиками.
Значения курсового угла, продольного и поперечного крена регистрируются с помощью гироскопов. Угловая скорость автомобиля измеряется прибором ДУС-6 (рис. 15).
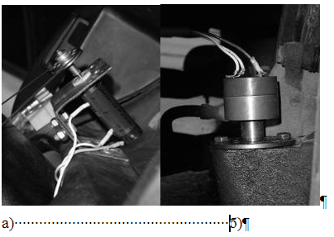
Рис. 13. Датчики углов поворота: а - РК; б – УК

Рис. 14. Акселерометры продольных и поперечных ускорений
Для определения линейной скорости и пройденного пути используется пятое колесо с тахометрическим датчиком первого комплекса, а также электромагнитным датчиком УРПД второго комплекса, установленным на вал привода троса спидометра.
Аналоговые сигналы перечисленных датчиков поступают на вход АЦП, обрабатываются, после чего регистрируются портативным ПК. Используемый в данном комплексе АЦП (модуль Е-140) является многоканальным 14-ти разрядным устройством, позволяющим работать одновременно с 16-ю дифференциальными или 32-мя каналами с общей землей. В целях проводимых исследований нами используются 14 дифференциальных каналов. Каждый из аналоговых каналов подключается к АЦП через программно управляемый аттенюатор, позволяющий задавать один из четырех диапазонов измерения напряжений.
Модуль Е-140 обеспечивает непрерывный сбор данных на частотах дискретизации АЦП от 0,122 до 100,00 кГц. Малые габариты модуля и использование широко распространенного в последнее время интерфейса USB делают модуль Е-140 удобным для организации дорожных испытаний, требующих высокую степень мобильности.
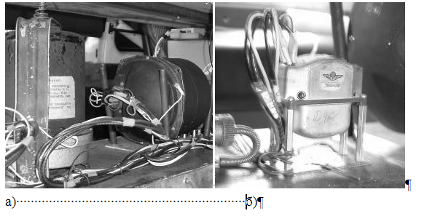
Рис. 15. Гироскопы: а - курсового угла, продольного и поперечного крена; б - угловой скорости автомобиля
Совместно с АЦП для регистрации цифровых сигналов параметров движения используется портативный ПК с предустановленным программным обеспечением (ПО) «PowerGraph 3.1 Professional», позволяющим вести непрерывную запись в режиме реального времени сколь угодно долгий период времени (ограниченный только ресурсами вычислительной системы ПК). ПО «PowerGraph» позволяет использовать персональный компьютер в качестве стандартных измерительных и регистрирующих приборов (вольтметры, самописцы, осциллографы, спектроанализаторы и т.д.).
Отличительными функциональными возможностями данного ПО являются:
- предварительный мониторинг входных сигналов;
- независимая настройка и калибровка каналов;
- поддержка любых скоростей записи;
- эффективная система графического представления больших объемов данных;
- выбор произвольного набора каналов для отображения;
- свободное позиционирование и масштабирование графиков;
- определение параметров сигналов по графикам с помощью скользящих маркеров;
- построение графиков зависимости одного канала от другого;
- построение гистограмм распределения сигналов по амплитуде;
- библиотека статистических и информационных функций анализа данных и др.
Характерной чертой применения ПК и ПО является возможность автоматической регистрации временных интервалов.
УРПД второго комплекса обрабатывает и сохраняет регистрируемые параметры на собственное ПЗУ в течение восьми часов, при этом более старые данные перезаписываются. Таким образом, в любой момент времени имеется возможность получить параметры движения АТС за последние восемь часов. При необходимости регистрации больших периодов времени движения предусмотрено использование съемных носителей информации. Информация о режиме и параметрах движения АТС, записанная таким образом, в дальнейшем может быть перенесена на ПК для расшифровки и детализации проведенных измерений.
Программа испытаний передвижной лаборатории включала следующие режимы движения:
1. Управляемое прямолинейное движение для оценки: интенсивности управления и ширины динамического коридора. То же – с торможением для оценки ширины динамического коридора.
2. Импульсное силовое воздействие на управляемые колеса от неровности дороги для оценки траекторной устойчивости в коридоре движения.
3. Стабилизация (бросок руля) - определение стандартных показателей.
4. Маневр (конечная цель - оценка запаздывания рулевого управления):
4.1. Ступенчатый поворот рулевого колеса (рывок руля).
4.2. Вход в поворот / отворот от препятствия.
4.3. Переставка / объезд неподвижного препятствия.
4.4. Движение по змейке.
Во всех случаях пункта 4 оценка стандартных показателей.
5. Маневр с торможением.
5.1. Переставка / объезд неподвижного препятствия.
5.2. Вход в поворот / отворот от препятствия.
В этих случаях оценка отклонения от эталона – нового автомобиля.
Конечной целью испытаний являлась оценка влияния факторов эксплуатации, исследуемых в этих режимах:
1. Люфт рулевого колеса – 10, 20 и 30 градусов (задается регулировкой рулевого механизма).
2. Изменение жесткости (упругости) рулевого привода путем замены элементов рулевого привода на изношенные (до аварийного состояния) шарниров рулевых тяг и др.
3. Установка гидроусилителя руля для оценки его влияния на вышеперечисленные параметры.
В заездах оценивалось сочетание упомянутых факторов. Основное внимание в испытаниях уделено эксперименту «переставка», в котором доходили до предела по сцеплению. Заезды проводились несколькими специально подготовленными водителями для возможности экспертных оценок.
В период испытаний погодно-климатические условия позволили выполнить заезды как на сухом, так и на мокром дорожном покрытии. Это позволило оценить влияние состояния дороги на упомянутые параметры эксплуатационных свойств (рис. 16).

Рис. 16 Отрыв колеса в маневре «переставка» на мокром покрытии
Учитывая важность с позиции безопасности дорожного движения экспериментально определялось время запаздывания рулевого управления. Записи углов поворота рулевого и отдельно левого и правого управляемых колес позволили для условий нештатного (критического) режима движения определить это время: левое УК – 0,15 с, правое УК – 0,25 с (рис. 17).
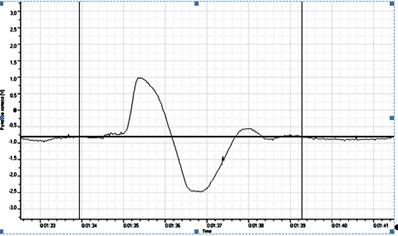
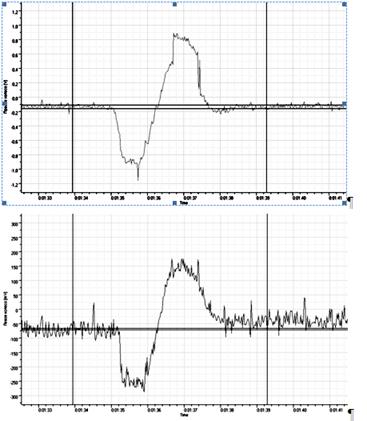
Рис. 17. Экспериментальные зависимости углов поворота рулевого и управляемых колес от времени в маневре «переставка» на сухом покрытии
Особым результатом для проверки адекватности математических моделей курсового движения автомобиля служат записи углов поворота вокруг его вертикальной оси, а также продольных и поперечных ускорений, позволивших оценить динамику автомобиля в режиме «переставка» (рис. 18).
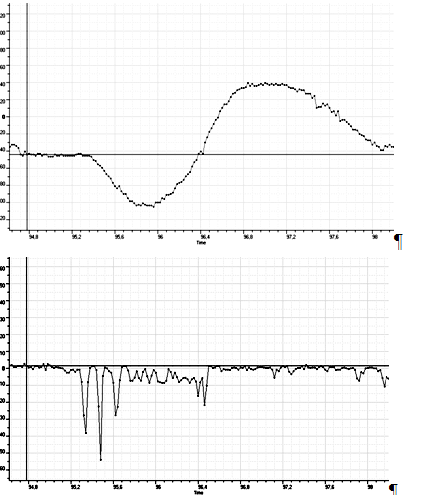
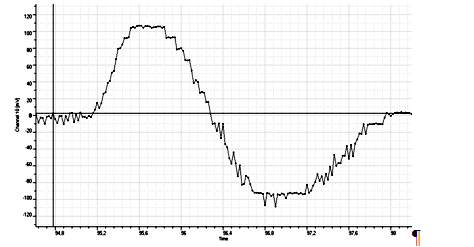
Рис. 18 Экспериментальные зависимости угловой скорости, продольного и поперечного ускорений автомобиля в «переставке» на сухом покрытии
В маневре «рывок руля» экспериментальные зависимости углов поворота рулевого колеса, угловой скорости и поперечного ускорения автомобиля показали характер их изменений для условий отрыва колеса от дорожного покрытия (рис. 19).

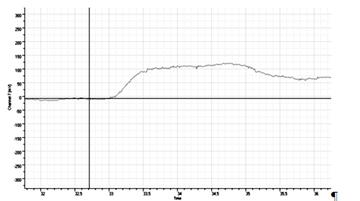
Рис. 19. Экспериментальные зависимости изменения угла поворота рулевого колеса, угловой скорости и поперечного ускорения автомобиля в маневре «рывок руля» на сухом покрытии
В маневре «стабилизация» (бросок руля) при движении по кругу радиусом 35 м сравнивались результаты изменения углов поворота рулевого колеса, угловой скорости и поперечного ускорения автомобиля при выходе из круга как влево, так и вправо (рис. 20).
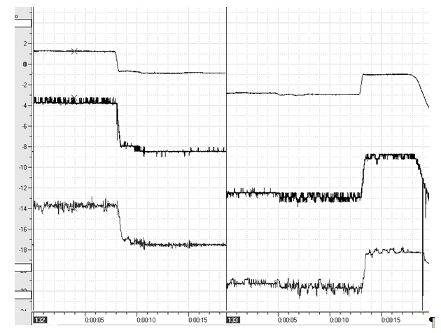
Рис. 20. Экспериментальные зависимости изменения угла поворота рулевого колеса, угловой скорости и поперечного ускорения автомобиля в маневре «стабилизация» на сухом покрытии
В заключении следует отметить, что набранная база экспериментальных данных уникальных совместных испытаний позволяет использовать результаты в целях как совершенствования «черного» ящика (данные испытаний расшифровываются), так и проверки адекватности моделей курсового движения.
Для учебного процесса сняты уникальные видеофильмы упомянутых маневров, опрокидывания автомобиля на стенде и др., а также приобретен преподавателями ВУЗов ценный опыт ездовых испытаний автомобилей.
0 комментариев