Навигация
Оценка параметров устойчивости и управляемости АТС в стендовых условиях
42758
знаков
1
таблица
28
изображений
3. Оценка параметров устойчивости и управляемости АТС в стендовых условиях
Устойчивость и управляемость АТС в значительной степени определяют активную безопасность автотранспортных средств (АТС) и, следовательно, общий уровень безопасности дорожного движения (БДД). В настоящее время международные и национальные стандарты как на требования АТС, так и на методы испытаний этих свойств недостаточно гармонизированы, что объясняется как сложностью регламентации всех параметров системы ВАДС (особенно водителя - испытателя), так и недостаточным метрологическим обеспечением технологии испытаний.
Кроме того, испытаниям подвергаются только новые автомобили, в то время как очевидно, что в процессе эксплуатации АТС в рулевом приводе и переднем мосте происходят выработки узлов и сопряжений, приводящие к возникновению повышенного свободного хода рулевого колена (РК), снижая большинство параметров устойчивости и упругости АТС.
Оценка этого снижения и его влияния на основные показатели БДД чрезвычайно важная проблема, решить которую в некоторой степени можно путем проведения стендовых испытаний АТС на динамических полноопорных стендах с беговыми барабанами.
Эта уверенность основывается на следующих соображениях. Основные параметры устойчивости и управляемости АТС, такие как изменение курсового угла, характеристики подруливания и легкости управления, наличие зон нечувствительности и запаздывания рулевого управления, однозначно связаны с такими показателями, как боковая сила в пятне контакта управляемых колес с дорожной поверхностью, усилие на рулевом колесе и свободный ход рулевого колеса.
Значения этих показателей в настоящее время доступны к измерению при проведении стендовых испытаний. И в этом аспекте основной проблемой уже является обеспечение адекватности списываемых со стенда показателей их аналогам, измеряемым при дорожных ходовых испытаниях.
В связи с предыдущим замечанием представляется очень важным для дальнейших исследований правильный выбор типа динамического стенда. Все динамические стенды для контроля технического состояния переднего моста и рулевого управления (РУ) можно разделить на 2 группы. С помощью первой группы стендов судят о техническом состоянии этих систем по величине бокового усилия в контакте колеса и измерительного элемента. С помощью второй - непосредственно замеряют положение плоскости качения колеса относительно плоскости симметрии автомобиля.
Обе группы стендов могут быть подразделены с учетом геометрии опорных устройств, типа воспринимающего устройства и конструктивного исполнения. Оценку и выбор стенда из классификационной номенклатуры проводим по методике, разработанной С.С. Селивановым. В качестве критериев оценки были приняты следующие показатели:
- информативность, которая определяется количеством сведений о структурных параметрах узла или агрегата;
- соответствие условий контроля условиям эксплуатации;
- обеспечение автостабилизации колес на стенде;
- возможность, безопасность и удобство проведения регулировочных работ на стенде;
- возможность диагностирования других узлов автомобиля на стенде;
- трудоемкость диагностических операций;
- стабильность и достоверность показаний стенда;
- стоимость стенда;
- надежность и долговечность стенда.
Проведенная оценка по данной методике показала, что наибольшее количество баллов имеют диагностические роликовые стенды с одним или двумя роликами». На втором месте стоят стенды с воспринимающим боковые нагрузки одним из двух опорных барабанов. Отставание в баллах этих стендов от роликовых обусловлено только по показателю информативности, так как они не дают возможности прямого измерения углов развала и схождения управляемых колес.
Однако применение дополнительного устройства, представляющего собой воспринимающий треножник, рамки которого прижимаются к боковине вращающегося колеса, нивелирует указанный недостаток и даже выводит данный тип стендов в наиболее приемлемые для указанных исследований.
Таким образом, исследования снижения некоторых параметров устойчивости и управляемости АТС будем проводить на универсальном динамическом стенде (рис. 21), разрабатываемом на кафедре АСОиБД, (А.С.) за основу механической части которого взят стенд разработки А.А. Филимонова с конструктивными изменениями передней секции.
Колеса передней оси приводятся во вращение передними беговыми барабанами посредством асинхронного электродвигателя. Кроме того, имеется возможность привода от двигателя автомобиля как переднеприводного, так и заднеприводного, через цепную передачу между барабанами передней и задней секций.
Другой немаловажной особенностью данного стенда является возможность самоориентации автомобиля, имеющего непараллельность возможного расположения осей передних и задних колес и барабанов стенда. Без подобной самоориентации измеренные боковые силы на передних управляемых колесах неизбежно будут содержать компоненту, вызванную данной непараллельностью, что осложнит адекватную интерпретацию данных сил для анализа и оценки параметров согласно целей исследования.
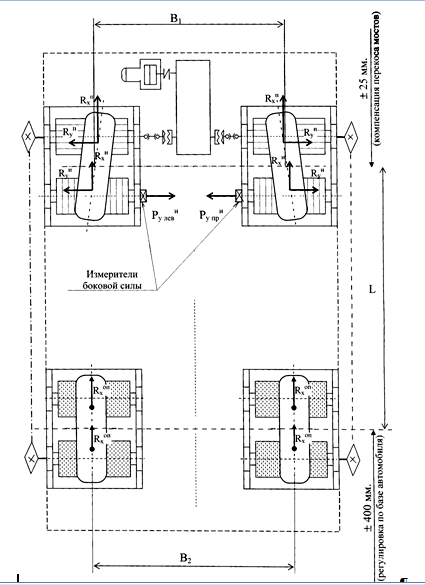
Рис. 21. Схема универсального диагностического стенда
На данном стенде эта задача решена использованием силового метода ориентации автомобиля на стенде, разработанном А. Филимоновым. В его основу положено силовое равновесие колес в поперечном направлении в процессе качения по свободно вращающимся барабанам. Ось ведущих неуправляемых колес всегда перпендикулярна направлению прямолинейного движения автомобиля. Это можно использовать для точной ориентации автомобиля на стенде при условии, что ведущие колеса установлены на барабанах, оси которых строго параллельны по-перечной оси стенда.
Далее ведущие колеса прокручивают эти барабаны, и в результате взаимодействия сил, возникающих в местах контакта роликов и колес, ведущая ось автоматически при прокрутке занимает положение на стенде, соответствующее прямолинейному движению АТС.
Управляемые же колеса устанавливаются в нейтральное положение по отношению к продольной оси стенда поворотом руля. Причем критерием правильности установки колес в прямолинейное положение в данном случае может служить как уменьшение величины схождения при их отклонении от нейтрального положения, так и равенство боковых сил на измерительных датчиках опорных барабанов.
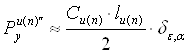
Проведем теоретический анализ возможности адекватного использования измеряемого значения силы Риулев (пр) при аналогичном дорожном испытании курсового угла
Известно, что если на эластичное колесо действует при его качении по плоской поверхности боковая сила Р¶у, то перемещение центра колеса не будет совпадать с направлением плоскости его вращения, составляя с этой плоскостью угол увода d, который при небольших значениях (до 8°) можно приближенно найти по следующей формуле:
 ,
,
где Кув - коэффициент сопротивления уводу.
Естественно предположить, что если на колесо извне боковая сила не действует, а колесо установлено таким образом, что его направление перемещения образует с плоскостью вращения определенный угол de,a (колесо установлено со схождением и развалом), то в пятне контакта колеса с опорной поверхностью появится боковая сила Р¶¢у, которую также можно выразить зависимостью Р¶¢у=Кув×de,a.Для конкретного типа шин и условий эксперимента величина Кув будет зависеть от нормальной нагрузки, действующей на колесо. Для практических расчетов можно использовать формулу, предложенную Р. Смилиеем и В. Горном:
Кув=С(А-В×Gк)× Gк,(1)
где А, В, С - коэффициенты, зависящие от конструкции шины.
Таким образом, зная нагрузку и тип шин, можно определить Кув, а задаваясь величиной угла и влиянием развала - схода dea, определить величину боковой силы в пятне контакта при качении колеса, установленного со схождением.
Если рассматривать качение колеса по беговым барабанам стенда, то нормальная нагрузка, приходящаяся на колесо Gк, распределяется между барабанами по известным зависимостям. Таким образом, можно предположить, что боковая сила в пятнах контакта колеса с барабанами, вызванная качением колеса со схождением, будет равна
![]() ,(2)
,(2)
где индексы «п» и «и» относят соответствующие параметры к приводному и измерительному барабану соответственно.
Очевидно, что
![]()
будет в несколько раз больше Р¶¢у, измеренной в дорожных условиях. Это обусловлено значительным различием пятна контакта шины с опорной поверхностью при дорожных и стендовых испытаниях.
Если принять предложенное утверждение Я.М. Певзнера и Г.А. Гаспарянца о том, что боковая сила в пятне контакта пропорциональна боковой деформации шины в данной точке опорной поверхности, то можно записать:
dРу²=lш×у×dx,(3)
где lш - коэффициент, зависящий от упругих свойств шин;
у - боковая деформация шины;
у = х - tgde +ун»х×de+ун,
где ун - боковая деформация в начальной точке контакта.
Обозначив длину пятна контакта с барабаном через 1и(п) и продифференцировав уравнение (1) от 0 до 1и (п), получаем:
 .(4)
.(4)
Приняв lш×1и(п)=Си(п) - коэффициент боковой жесткости шины в контакте шины с барабанами, получим:
 .(5)
.(5)
Так как при малых de,a,ун»0, то
 .
.
В конкретных условиях эксперимента определение Си(п) и lи (п) не представляет трудностей.
Итак, суммарная боковая сила на стенде равна
![]() ,
,
а коэффициент перевода боковой силы F, снимаемой на стенде, в значение боковой силы F, вызывающей тот же боковой увод шины de,a при качении по дороге, которой будет равен
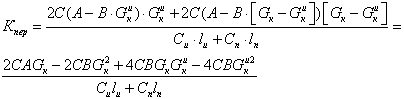 (6)
(6)
где С»100... 140-для различных типов шин;
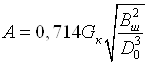 ;(7)
;(7)
 ,(8)
,(8)
где Вш - ширина профиля недеформированной шины;
D0 - свободный диаметр шины.
Таким образом, целью работы является создание математического аппарата, позволяющего путем инструментального контроля на универсальном диагностическом стенде отслеживать изменение некоторых параметров устойчивости и управляемости АТС в процессе эксплуатации, а также выявление и анализ влияния наработок в агрегатах, узлах и механизмах АТС на изменение данных параметров и на снижение безопасности движения и прогнозирование критических значений указанных наработок по условиям безопасности движения.
Прелагается примерный алгоритм:
- автомобиль на стенде проходит комплексные испытания;
- снимаемые параметры, а также измеренные ранее подставляем в качестве входных в математическую модель поведения автомобиля на стенде;
- на выходе получаем углы увода колес автомобиля и соответствующие им боковые силы;
- полученные значения в качестве входных параметров вносятся в математическую модель криволинейного движения автомобиля (часть входных параметров задают режим криволинейного движения – тип выполняемого маневра);
- на выходе получаем показателя устойчивости и управляемости АТС, характеризующие БДД;
- производится анализ технического состояния АТС и связанное с ним ухудшение БДД по параметрам устойчивости и управляемости;
- делают прогноз критического значения наработок в анализируемых агрегатах и узлах (рулевое управление, передний мост, шины) по указанным параметрам.

а)
б)
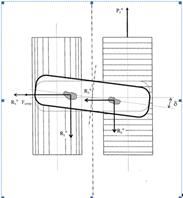
Рис. 22. Схема привода от двигателя автомобиля (передний привод): а) фронтальный вид; б) вид сверху

а)
б)
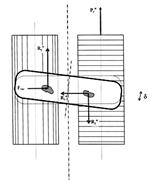
Рис.23. Схема привода от электродвигателя барабана (задний привод): а) фронтальный вид; б) вид сверху
Далее решаются промежуточные задачи:
- разработать методику испытаний АТС на стенде, позволяющую отследить влияние указанных ранее наработок на значение снимаемых с измерителя боковых сил параметра – Рyи;
- разработать математическую модель автомобиля на стенде, позволяющую получать значения углов увода колес автомобиля и соответствующих им боковых сил, адекватных криволинейному движению автомобиля;
- разработать математическую модель криволинейного движения автомобиля и комплексы входных параметров, адекватно отражающие различные режимы движения и маневры автомобиля;
- данная модель должна в качестве выходных параметров иметь показатели БДД по условиям устойчивости и управляемости;
- проведение полигонных испытаний испытуемых автомобилей и получение указанных выше показателей БДД;
- сравнение результатов и выводы.
Принимаем общие допущения:
При проведении полигонных испытаний в рассматриваемых нами режимах движения управляемые колеса поворачиваются на угол менее 15°, т.е. автомобиль движется по траектории сравнительно больших радиусов и на высоких скоростях. Поэтому стендовые испытания предлагается проводить при углах поворота управляемых колес не более 10°.
Предполагается, что в данных режимах испытаний можно достоверно отследить влияние ухудшения тех. состояния АТС на снимаемые со стенда параметры, и при этом избежать больших нелинейных ошибок, возникающих из-за особенностей контакта шины с поверхностью барабанов.
Остальные допущения и условия обосновываются и оговариваются в соответствующих моделях.
Выводы и рекомендации
1. Существуют известные зависимости, отражающие изменение нормальных реакций на колесо со стороны барабанов (RNп и RNи) в различных режимах испытаний. Необходимо проанализировать следующие предположения:
RNп / RNи = RXп / RXи = RYп / RYи;
RNп + RNи = Gк;
RYп + RYи = РY,
из которых можно найти значение РY, сняв с измерительного устройства значение RYи.
2. В режиме испытаний на стенде, когда движение колеса осуществляется посредством привода автомобиля (передний привод), реакции RYп и RYи сонаправлены. В случае, когда управляемые колеса приводятся во вращение электроприводом барабана или двигателем автомобиля (задний привод) через цепную передачу, данные реакции противоположно направлены, причем меняется направление реакции RYп. При этом изменяется форма пятна контакта шины и приводного барабана. Это приводит к тому, что деформация шины в обоих случаях (особенно во втором) значительно отличается от ее деформации в дорожных условиях.
В связи с этим высказывается предложение синхронного привода от двигателя автомобиля и электродвигателя приводных барабанов с целью взаимной нейтрализации возникающих реакций RYп. Согласно данному предложению, суммарная боковая реакция на колесе будет равна нулю при равенстве касательных скоростей колеса и барабана (wб×rб = wк×rк).
Поскольку радиус колеса в процессе испытаний изменяется, то в качестве синхронизирующего фактора, определяющего передаточное число скоростей вращения барабана и колеса, предлагается изменяющееся расстояние между осями вращения колеса и барабана. Либо, если анализ позволит заключить о малых погрешностях результатов при допущении rк = const, синхронизировать скорости вращения колес и барабанов через постоянное отношение их радиусов.
3. При выполнении предыдущего условия логически приходим к отсутствию касательных реакций в этом пятне контакта. Отсюда можно сделать вывод о том, что при данном режиме испытаний характер взаимодействия приводного управляемого колеса автомобиля с приводным барабаном будет идентичен состоянию покоя. При этом на измерительных барабанах сохраняются те же физические процессы, что и без описанной синхронизации. На наш взгляд, данный режим значительно приближает стендовое испытание к дорожному в вопросе идентичности пятна контакта, но данное предложение требует теоретического обоснования и практического подтверждения.
4. Не совсем понятен характер распределения нормальных реакций на колесо в описанном режиме и, как следствие, доля касательной и боковой реакций на колесо со стороны измерительного барабана.
Библиографический список
1. Авдонькин Ф.Н. Оптимизация изменения технического состояния автомобиля в процессе эксплуатации / Ф.Н. Авдонькин. – М.: Транспорт, 2008. – 350 с.
2. Артемьев А.Н. Моделирование управляемого движения автомобиля с целью оптимизации параметров, влияющих на управляемость. - Дис. … канд. техн. наук / А.Н. Артемьев. - М., 2008. - 158 с.
3. Байэтт Р. Расследование дорожно-транспортных происшествий: Пер. с англ. / Р. Байэтт, Р. Уоттс. - М.: Транспорт, 2009. - С. 288.
4. Болдин А.П. Научные основы разработки и использования систем внешнего и встроенного диагностирования на автомобильном транспорте. Дис. … док. тех. наук. - М., 2007. - 430 с.
5. Венгеров И.А., Сурков С.В. Автомобильный транспорт и проблема повышения безопасности дорожного движения. // Вестник Российского автотранспортного союза. - 2010. - №1. - С. 25-30. Государственный доклад по безопасности дорожного движения за 2000 г.
6. Волошин Г.Я. Анализ дорожно-транспортных происшествий / Г.Я. Волошин, В. П. Мартынов, А. Г. Романов. – М.: Транспорт, 2007. – 240 с.
7. Гержодов В.И. Техническое состояние автомобилей и безопасность движения / В.И. Гержодов. – К.: Техника, 2008. – 149 с.
8. Говорущенко Н.Я. Диагностика технического состояния автомобилей / Н.Я. Говорущенко. - М.: Транспорт, 2010. – С. 54.
9. Денисов А.С. Основы формирования эксплуатационно-ремонтного цикла автомобилей / А.С. Денисов. – Саратов: Сарат. гос. техн. ун-т, 2009. – 352 с.
10. Диваков Н.В. Топливный баланс автомобиля / Н.В. Диваков, А.Н. Стрельников // Автомобильная промышленность. - 2011. - №8. - С. 13-14.
11. Иларионов В.А. Стабилизация управляемых колес автомобиля / В.А. Иларионов. – М.: Транспорт, 2006. – 167 с.
12. Кислицын Н.М. Определение углов установки управляемых колёс при движении автомобиля / Н.М. Кислицын, Ю.В. Максимов // Автомобильная промышленность. – 2007. - №9. - С. 26-27.
13. Кнороз В.И. Работа автомобильной шины / В.И. Кнороз. - М.: Транспорт, 2006. – 238 с.
14. Коллинз Д. Анализ дорожно-транспортных происшествий / Д. Коллинз, Д. Моррис. – М.: Транспорт, 2011. - С. 128.
15. Лаврентьев П. Совершенствование государственного контроля безопасности автотранспортных средств / П. Лаврентьев // Автомобильный транспорт – 2010. - №3. - С. 45.
16. Литвинов А.С. Исследование кинематики рулевого управления с учётом кинематики передней подвески / А.С. Литвинов, Ю.М. Немцов, С.А. Тимофеев // Автомобильная промышленность. – 2010. - №1. - С. 11-I3.
17. Логинов В.Н. Электрические измерения механических величин, 2-е изд., перераб. и доп / В.Н. Логинов. - М.: Энергия, 2006. - 102 с.
18. Малюков А.А. Научные основы стендовых испытаний автомобилей на активную безопасность. Дис. … док. тех. наук. - М., 2008. - 546 с.
0 комментариев