Навигация
Основные термины и определения
55704
знака
2
таблицы
0
изображений
2.1. Основные термины и определения.
На уровне служб дорожного движения, организация дорожного движения представляет собой комплекс инженерных и организационных мероприятий на существующей улично-дорожной сети, обеспечивающих безопасность и достаточную скорость транспортных и пешеходных потоков. К числу таких мероприятий относится управление дорожным движением, которое, как правило, решает более узкие задачи. В общем случае под управлением понимается воздействие на тот или иной объект с целью улучшения его функционирования. Применительно к дорожному движению объектом управления являются транспортные и пешеходные потоки. Частным видом управления является регулирование, т.е. поддержание параметров движения в заданных пределах.
С учетом того, что регулирование является лишь частным случаем как управления, так и организации движения, а целью применения технических средств является реализация ее схемы, употребляется термин "технические средства организации движения" или "технические средства управления движением",что соответствует принятым нормативным документам (ГОСТ 23457-86).
В месте с тем, в силу сложившейся традиции, термин "регулирование" также получил широкое распространение. Например, в Правилах дорожного движения (ПДД) перекрестки и пешеходные переходы, оборудованные светофорами, называются регулируемыми, в отличие от нерегулируемых, где светофоры отсутствуют. Существуют также термины "цикл регулирования","регулируемое направление" и т.п. В специальной литературе перекресток, оборудованный светофором, нередко называется "светофорным объектом".
Сущность управления заключается в том, чтобы обязывать водителей и пешеходов, запрещать или рекомендовать им те или иные действия в интересах обеспечения скорости и безопасности. Оно осуществляется путем включения соответствующих требований в ПДД, а также применением комплекса технических средств и распорядительными действиями инспекторов дорожно-патрульной службы ГАИ и других лиц, имеющих соответствующие полномочия.
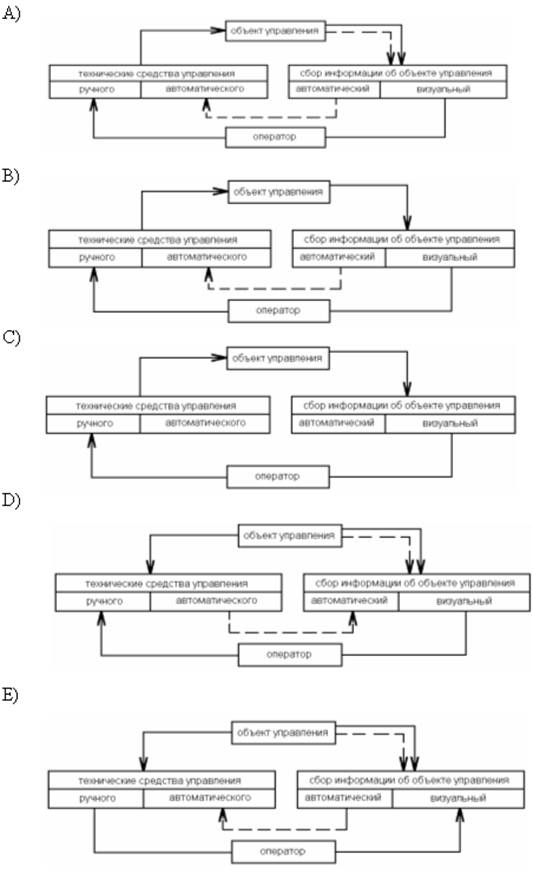
Объект управления, комплекс технических средств и коллективы людей, вовлеченные в технологический процесс управления движением,
образуют контур управления (рис.1). поскольку часть функций в контуре управления часто выполняется автоматическим оборудованием, сложилось употребление терминов "автоматическое управление" или "системы управления".
mq9.pdr 2
0.7
----------------------
---------- Объект управления --------------
| | -- -- -- -- |
| ---------------------- |
| Технические средства управления | Сбор информации об объекте управления | |||
| ручного | автоматического | автоматический | визуальный | |
| -- -- -- -- -- -- -- |
| --------------------- |
------------------- Оператор ----------------
---------------------
mq9.pdr 4
0
Рис.1. Структурная схема контура управления.
Автоматическое управление осуществляется без участия человека по заранее заданной программе, автоматизированное - с участием человека-оператора. Оператор, используя комплекс технических средств для сбора необходимой информации и поиска оптимального решения, может корректировать программу работы автоматических устройств. Как в первом, так и во втором случае в процессе управления могут быть использованы ЭВМ. И, наконец, существует ручное управление, когда оператор, оценивая транспортную ситуацию визуально, оказывает управляющее воздействие на основе имеющегося опыта и интуиции. Контур автоматического управления может быть как замкнутым, так и разомкнутым.
При замкнутом контуре существует обратная связь между средствами и объектом управления (транспортным потоком). автоматически она может осуществляться специальными устройствами сбора информации - детекторами транспорта. Информация вводится в устройства автоматики, и по результатам ее обработки эти устройства определяют режим работы светофорной сигнализации или дорожных знаков, способных по команде менять свое значение (управляемые знаки). Такой процесс получил название гибкого или адаптивного управления.
При разомкнутом контуре, когда обратная связь отсутствует, управляющие светофорами устройства - дорожные контроллеры (ДК) переключают сигналы по заранее заданной программе. В этом случае осуществляется жесткое программное управление.
На рис.1 цепь обратной связи, замыкающая контур автоматического управления, показана штриховой линией с учетом, что эта связь
может существовать или отсутствовать. При ручном управлении обратная связь существует всегда (в силу визуальной оценки оператором условий движения), поэтому ее цепь на рис.1 показана сплошной линией.
В соответствии со степенью централизации можно рассматривать два вида управления: локальное и системное. Оба вида реализуются вышеописанными способами.
При локальном управлении переключение сигналов обеспечивает контроллер, расположенный непосредственно на перекрестке. При системном контроллеры перекрестков, как правило, выполняют функции трансляторов команд, поступающих как правило по специальным каналам связи из управляющего пункта (УП). При временном отключении контроллеров от УП они могут обеспечивать и локальное управление. Оборудование, расположенное вне управляющего пункта, получило название периферийного (светофоры, контроллеры, детекторы транспорта), на управляющем пункте - центрального (средства вычислительной техники, диспетчерского управления, устройства телемеханики и т.д.).
На практике применяют термины "локальные контроллеры" и "системные контроллеры". Первые не имеют связи с УП и работают самостоятельно, вторые такую связь имеют и способны реализовать локальное и системное управление.
При локальном ручном управлении оператор находится непосредственно на перекрестке, наблюдая за движением транспортных средств и пешеходов. При системном он располагается в управляющем пункте, т.е. вдали от объекта управления, и для обеспечения его информацией об условиях движения могут быть использованы средства связи и специальные средства отображения информации. Последние выполняются в виде светящихся карт города или районов - мнемосхем, устройств вывода с помощью ЭВМ графической и алфавитно-цифровой информации на электронно-лучевую трубку - дисплеев и телевизионных систем, позволяющих непосредственно наблюдать за контролируемым районом.
Локальное управление применяется чаще всего на отдельном или, как говорят, изолированном перекрестке, который не имеет связи с соседними перекрестками ни по управлению ни по потоку. Смена сигналов светофора на таком перекрестке обеспечивается по индивидуальной программе независимо от условий движения на соседних перекрестках, а прибытие транспортных средств к этому перекрестку носит
случайный характер.
Организация согласованной смены сигналов на группе перекрестков, осуществляемая в целях уменьшения времени движения транспортных средств в заданном районе, называется координированным управлением (управлением по принципу "зеленой волны"(ЗВ)). В этом случае, как правило, используется системное управление.
Любое устройство автоматического управления функционирует в соответствии с определенным алгоритмом, который представляет собой описание процессов переработки информации и выработки необходимого управляющего воздействия. Применительно к дорожному движению перерабатывается информация о параметрах движения и определяется характер управления светофорами, воздействующими на транспортный поток. Алгоритм управления технически реализуется контроллерами, переключающими сигналы светофоров по предусмотренной программе. В автоматизированных системах управления с использованием ЭВМ алгоритм решения задач управления реализуется также в виде набора программ ее работы.
Похожие работы
... движения и господствующего в настоящее время жесткого программного регулирования. Таким образом, введение светофорного регулирования является не всегда оправданным и зависит прежде всего от интенсивности конфликтующих потоков и от числа и тяжести ДТП. В соответствии с ГОСТ 23457-86 "Технические средства организации дорожного движения. Правила применения" транспортные светофоры типов 1 и 2, а ...
... ї ітелевизионногоіі Транспортные и пешеходные потоки ГДДДДДДґнадзора іАДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДДЩ АДДДДДДДДДДДДДДЩяD mq9.pdr 4яш0 Рис.2. Общая классификация технических средств организации движения. Дорожные контроллеры имеют различное исполнение в зависимостиот характера выполняемыми ими задач и подразделяются (как былоуказано выше) на ...
... . Регулируемый перекресток: 7,8 c Не регулируемый перекресток: ??? КР.947006.00.00.00.ПЗ Лист 18 Изм. Лист № докум. Подпись Дата 6 ПРОЕКТИРОВАНИЕ ТЕХНИЧЕСКИХ СРЕДСТВ РЕГУЛИРОВАНИЯ ДОРОЖНОГО ДВИЖЕНИЯ Следующее задание является последним и завершающим в выполнении курсовой работы ...
... м 67 Расстояние от сплошной линии разметки до края проезжей части не более: А) 0.3 м В) 0.2 м С) 0.4 м D) 0.5 м Е) 0.6 м 68 При устройстве пешеходных переходов в качестве технических средств организации движения не применяются: A) дорожные контроллеры B) транспортные светофоры C) пешеходные светофоры, островки безопасности, дорожные знаки и разметка, ограждения D) дорожные знаки ...
0 комментариев