Навигация
1. Общая часть.
1.1. Основные понятия
Преобразование входного сигнала системы (управляющего воздействия) в выходной сигнал (регулируемую величину) определяет закон изменения регулируемой величины. Реализация желаемого закона осуществляется в результате формирования управляющих переменных, которые воздействуют на регулируемую систему. Законы изменения регулируемой величины во времени могут быть различными; математически они описываются оператором системы. Этот оператор может реализовать пропорциональную зависимость выходного сигнала от входного, связь в виде производной или интеграла и т. д. В более общем случае, этот оператор может быть и нелинейным.
Необходимо отметить, что законы изменения регулируемых величин в машинах и агрегатах нарушаются под влиянием внешних, а иногда и внутренних воздействий, называемых возмущениями (или возмущающими воздействиями).Из определения этих воздействий видно, что система автоматического регулирования должна как можно точнее воспроизводить управляющее воздействие и возможно меньше реагировать на возмущающее воздействие.
Существует три различных принципа построения систем регулирования, обеспечивающих реализацию требуемого закона изменения регулируемой величины: по разомкнутому циклу, по замкнутому циклу, по комбинированному циклу регулирования (замкнуто-разомкнутый). Принцип разомкнутого цикла заключается в обеспечении требуемого закона изменения регулируемой величины непосредственно путем преобразования управляющего воздействия. Принцип замкнутого цикла характеризуется сравнением управляющего воздействия с действительным изменением регулируемой величины за счет применения обратной связи и элемента сравнения. Образующийся в результате сравнения сигнал ошибки не должен превышать некоторой заданно величины. За счет этого и обеспечивается в замкнутых системах требуемый закон изменения регулируемой величины. Комбинированный принцип заключается в сочетании замкнутого и разомкнутого циклов в одной системе.
Автоматическим управлением называется процесс, при котором
операции выполняются посредством системы, функционирующей без вмешательства человека в соответствии с заранее заданным алгоритмом.
Автоматическая система с замкнутой цепью воздействия, в которой управляющее (регулирующее) воздействие вырабатывается в результате сравнения истинного значения управляемой (регулируемой) величины с заданным (предписанным) ее значением, называется АСР.
Производственный процесс — совокупность взаимосвязанных трудовых и технологических процессов, при реализации которых исходные материалы и полуфабрикаты превращаются в готовые изделия.
Автоматическими называются устройства, которые управляют различными процессами и контролируют их без непосредственного участия человека.
Предмет или процесс, подлежащий изучению, называется объектом, а все окружающие предметы взаимодействующие с ними - внешней средой.
Система - совокупность элементов или устройств, находящихся в отношениях и связях между собой и образующих определенную целостность (единство).
Объект управления - совокупность технологических устройств (машин, орудий труда, средств механизации), выполняющих данный процесс с точки зрения управления.
Операция управления - обеспечивает в нужные моменты начало, порядок следования и прекращения рабочих операций, выделяет необходимые для их выполнения ресурсы.
Под управлением понимают процесс организации такого целенаправленного воздействия на объект управления, в результате, которого последний переходит в требуемое (целенаправленное) состояние.
Параметры производственного технологического процесса или технологического процесса или технологического объект, который необходимо поддерживать постоянно или изменять по определенному закону называется управляемой величиной.
Значение управляемой величины, которое согласно заданию должно быть в данный момент времени, называют заданным значением управляемой величины (управляемого параметра).
Схему изображающую последовательность процессов внутри устройства или системы, называется структурной схемой.
Звено - элемент, входящий в САУ в котором определенным образом преобразуется входной параметр в выходной (схематически изображается в виде блока, но не отражает особенности его конструкции).
Информация всегда связана с материальным носителем какой-либо физической величины. В технических системах такие носители называют носителями сигналов (например, электрические напряжения и ток, давление, механическое перемещение и др.), которые можно изменять в соответствии с передаваемой информацией.
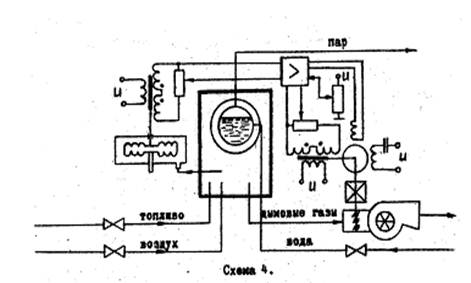
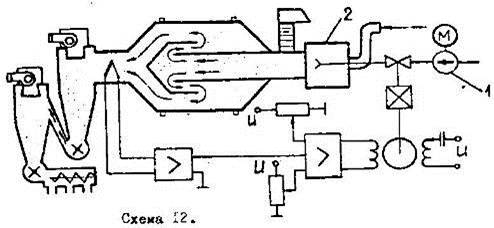
1.2. Описание исходной схемы автоматического регулирования.
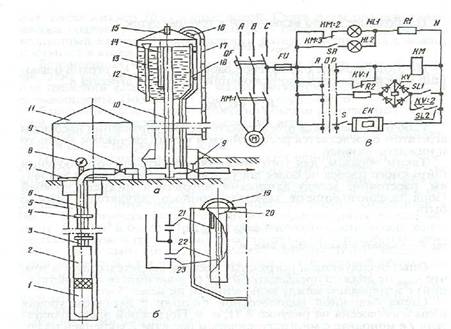
Поскольку объект регулирования является элементом или звеном АСР, то свойства АСР зависят прежде всего от свойств объекта регулирования. Поэтому для создания работоспособной АСР обеспечивающей требуемое качество регулирования, необходимо прежде всего, знать свойства объекта регулирования (спастические и динамические).
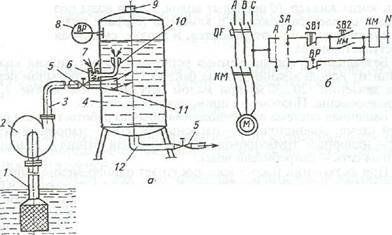
Объект регулирования лабораторного стенда представляет собой объект с распределенными параметрами, т.к. регулируемая величина (температура) неодинакова в различных точках объекта как в равновесном состоянии, так и переходном режиме.
Для увеличения инерционности объекта, которая должна быть в десять раз больше измеряемого в этом объекте датчиком, предусмотрен металлический стакан, наполненный стружкой, а котором расположен датчик температуры. Это поз.воляет увеличить теплообъем объекта.
Требуемая температура (эталонная) задается устройством на входе регулятора-задатчиком (tэ).
Возмущение
 |

Dt -
![]()
![]()
![]()
|
Регулятор
|
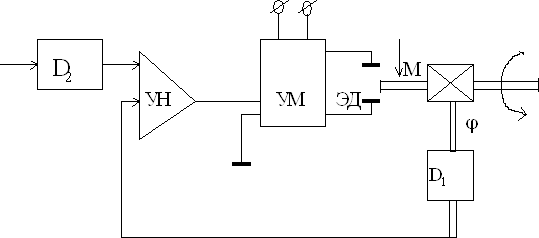
Рис. 1. Схема регулирования.
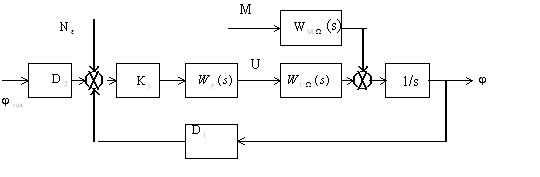
Фактическая температура преобразуется в сигнал устройством tф. Обозначая сигналы на выходе этих устройств аналогичными им буквами, выразим отклонение фактическое от требуемого в виде сигнала: ∆t = tэ – tф ; называемого отклонением или рассогласованием. Регулятор преобразует ∆t по определенному закону управления и включает исполнительное устройство. В нашем случае задача регулятора – ликвидность отклонения ∆t, вызванные действием возмущений В, т.е. различных нагрузок на объекты управления (изменение окружающей температуры, изменение положения шибера и т.д.).
Может возникнуть еще ошибка ∆t за счет изменения tэ, но, поскольку является известной заранее функцией, ошибка также может быть рассчитана заранее и скомпенсирована. Подобная система называется системой программного регулирования или просто САР.
В стенде предусмотрено двухпозиционное регулирование. При этом необходимо открыть заслонку, чтобы электронагревательный элемент постоянно обдувался воздухом. Регулирование температуры происходит за счет включения или выключения релейным элементом нагревательного элемента.
Для определения динамических свойств объекта в стенде установлен самопишущий прибор, который регистрирует изменения температуры в объекте и фиксирует их на диаграммной ленте.
Любой технологический агрегат, являющийся объектом регулирования ОР, работает в установившемся режиме, если в нем полностью соблюдается материальный и энергетический баланс. Основной параметр, характеризующий условия протекания технологического процесса (в нашем объекте это температура) в установившемся состоянии остается неизменной.
Зависимость выходной величины от входной величины в установившемся режиме называется статической характеристикой ОР. Статические характеристики могут быть как линейными, с различными коэффициентами наклона, так и нелинейными, при чем большинство реальных объектов в целом имеют нелинейные.
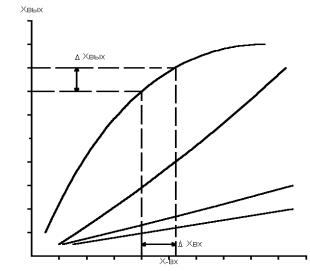
Рис 1.1. Статические характеристики ОР.
Эти характеристики ОР дают возможность оценить степень связи между различными входными и выходными величинами объекта.
Статические характеристики определяют расчетным или экспериментальным путем.
Динамической характеристикой объекта регулирования называется зависимость выходной величины от входной величины в переходном режиме.
Поскольку имения выходной величины ОР при различных возмущениях могут происходить по-разному, для исследования динамических характеристик объекта обычно используют типовые внешние воздействия.
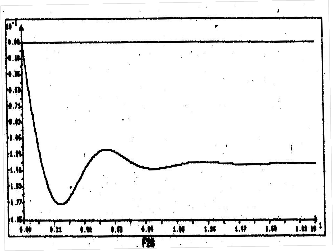
Кривая разгона САР температуры (рис.1.2.) указывает динамические свойства ОР.
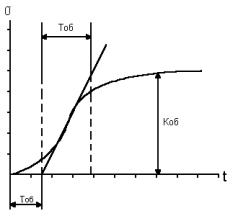
Рис 1.2. Кривая разгона
По рисунку видно, что объект обладает способностью постепенно приостанавливать отклонение выходной величины от первоначального значения и вновь восстанавливается равновесное состояние, т.е. объект обладает свойством самовыравнивания. Такие объекты называются статическими.
Объект обладает запаздыванием Тоб, и т.к. оно не значительно, в дальнейшем им будем пренебрегать.
Постоянная времени объекта Тоб – это условное время, в течение которого выходная величина изменилась бы от начального до нового установившегося значения, если бы это изменение происходило со скоростью, постоянной и максимальной для данного переходного процесса. Постоянная времени характеризует инерционность объекта, под которой понимают его способность замедленно накапливать и расходовать вещество и энергию, что становится возможным благодаря наличию в составе ОР сопротивлений и емкостей, препятствующих их поступлению и выходу.
Коэффициент передачи Коб ОР, представляет собой изменение выходной величины объекта при переходе из начального в новое в установившееся состояние, отнесенное к единичному возмущению на входе.
Единичным возмущением считают однопроцентное изменение входной величины объекта (перемещение регулирующего органа).
Таким образом:

где Хо – значение выходной величины в начальном установившемся состоянии; Х(∞) – тоже, но для нового установившегося состояния; ∆Хвх – величина вносимого возмущения; % хода регулирующего органа.
Похожие работы
... можно только после выяснения и устранения причин его отключения. 3. АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ НАСОСАМИ В зависимости от назначения насосной установки система автоматического регулирования должна обеспечить поддержание в требуемых пределах давления, расхода и температуры воды. Кроме того, при аварийной остановке рабочего насоса должен автоматически включаться резервный. Для дистанционного ...
... сигнал ошибки "е". Преобразованная таким образом структурная схема САР разряжения в топке котла показана на рис.4. 3. Определение закона регулирования системы Для определения закона регулирования рассматриваемой системы автоматического регулирования разрежения в топке котла найдем передаточную функцию, определяющую взаимосвязь Qв на объект и ошибки "е": Подставим в найденное ...
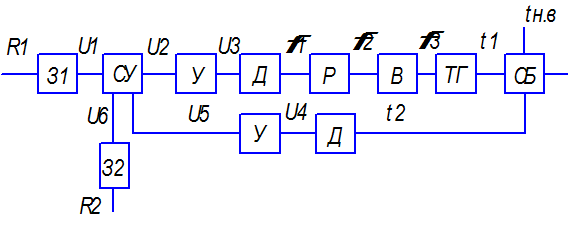
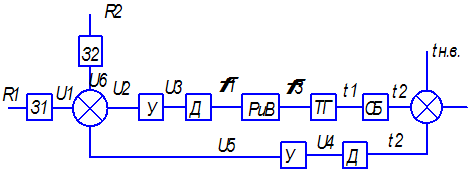
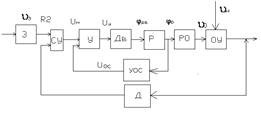
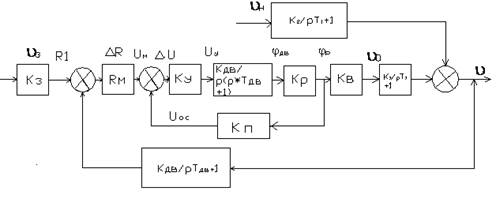
... вывод: В системе реализован принцип управления по отклонению. Система является стабилизирующей. 2. Составление структурной схемы системы автоматического регулирования температуры теплоносителя в агрегате АВМ Структурной схемой называется наглядное графическое изображение математической модели (математического описания) системы. При математическом описании систему разбивают на отдельные ...
... Национальный Технический Университет Кафедра Технической кибернетики ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по курсу «Проектирование систем автоматического управления» «Проектирование системы автоматического регулирования угла поворота вала электродвигателя» Выполнила: ст. гр. А – 61з Брусинов С. Э. Проверил: Дубовик С.А. Оценка ________________ Дата «____» ...
0 комментариев