Навигация
Мном = 18 × 10ˉ Нм = 0,11 < 2 условие выполнено
11789
знаков
8
таблиц
5
изображений
1. Мном = 18 × 10ˉ Нм = 0,11 < 2 условие выполнено
2. Wтр = Wн iо = 0,5 рад/с × 10300 = 5150 рад/с
p пном 3,14 × 16000
Wном = 30 = 30 = 1675 рад/с
Wном<Wтр
1675<5150
условие не выполнено
Случай , когда выполняется требование по моменту (ускорению), характерен для двигателей переменного тока . Очевидно, если двигатель , имеющий запас по мощности , не удовлетворяет требованию по скорости, то , изменяя передаточное отношение редуктора, можно согласовать соотношение между требуемой и располагаемой мощностями. Новое передаточное отношение можно определить по выражению:
Wном 1675
i = Wвв = 0,5 = 3350
Если при найденном значении i выполняется условие Мтр/Мном ≤ 2 , то выбор ИД можно считать законченным , т.к. этот двигатель удовлетворяет обоим условиям по обеспечению требуемой скорости и ускорения выходного вала.
Проверка:
Мн Jн 0,8 Нм 0,3Нмс²
Мтр = ih + i + Jд i eн = 3350 ·0,9 + 3350 + 1,4 × 10ˉ ×
![]()
× Нмс²× 3350 × 0,7 рад/с² = 2,78 × 10ˉ Нм
Мтр 2,78× 10ˉ Нм
Мном = 18 × 10ˉ Нм = 0,15 < 2 условие выполнено
Определение коэффициентов СΩ ,См ,Тм с учетом нагрузки:
Мп 34× 10ˉ Нм
См = Uу = 30 В = 1,13× 10ˉ Нм/В
30(Мп –Мном) 30 ( 34× 10ˉ Нм - 18× 10ˉ Нм )
вдв = p пном = 3,14× 16000 об/мин = 9,6× 10ˉ Нм
См 1,13× 10ˉ Нм/В
СΩ = вдв = 9,6× 10ˉ Нм = 117 рад/В× с
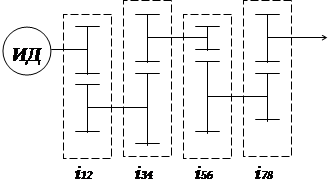
Найдем количество ступеней редуктора:
iред = 3350 = i12× i34× i56× i78 = 4 × 5 × 12 × 14 = 3360
 | |||
| |||
4.
Для питания обмоток управления асинхронного двигателя целесообразно применить усилитель переменного тока на полупроводниковых элементах. Передаточную функцию усилителя запишем так:
Ку _
Wу(Р) = ТуР + 1 , где Ту = 0,02 с
Найдем Ку исходя из заданной суммарной погрешности:
Djå = Djиэ +Djзз +Djмш +Djуск ,
где
![]() Djå = 2,5' Djиэ = 1,0' Djмш= 1,0'
Djå = 2,5' Djиэ = 1,0' Djмш= 1,0'
Djзз+Djуск = Djå - (Djиэ+Djмш)= 2,5' - 1' – 1' = 0,5'
eн 1
Djуск = К ( Ту + Тм – К )
1
Djзз = Ку
Пусть добротность К = 600 1/с , тогда
0,7·3438' 1
Djуск = 600 · ( 0,02 + 0,1 – 600 ) = 0,47'
Отсюда вычислим Ку:
1_
К = К1 · Ку · СW · Кред , где Кред = iред
( К× iред ) ( 600 1/с · 3350 ) _
Ку = ( К1· СW ) = ( 5 · 10ˉ³ В/угл.мин · 117 · 3438'/В · с ) = 1000
1 _
Djзз = 1000 = 0,001
DjΣ = 1' + 1' + 0,001' + 0,47' = 2,471'
DjΣр < DjΣз
условие выполнено
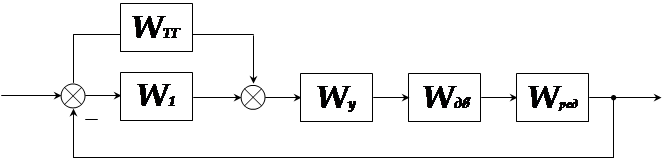
5.
Передаточные функции отдельных звеньев:
Так как в параллель измерительному элементу ставим тахогенератор,
в системе будет отсутствовать скоростная ошибка если:
К1 5 мВ/угл.мин
КТГ = К = 600 1/с = 0,008 мВ·с / угл.мин
Крутизна тахогенератора :
КТГ = 1¸ 5 мВ/об/мин
3 мВ·с_
Выберем КТГ = 3 мВ/об/мин = 0,1·3438΄ = 0,008 мВ·с/ угл. мин
W1(Р) = К1 ;
WТГ(Р)= КТГР ;
1000 _
Wу(Р) = (0,02Р + 1) ;
СW _ 117 _
Wдв(Р) = Р(ТмР + 1) = Р(0,1Р + 1) ;
Передаточная функция исходной системы:
К _ 600 _
Wисх(Р) = Р(ТмР + 1)(ТуР + 1) = Р(0,1Р + 1)(0,02Р + 1)
Проверка на устойчивость системы:
1 1
К ≤ Ту + Тм
600 ≤ 1/0,02 + 1/0,1
600 ≤ 60
условие не выполняется
( система не устойчива )
6.
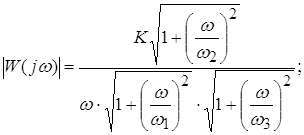
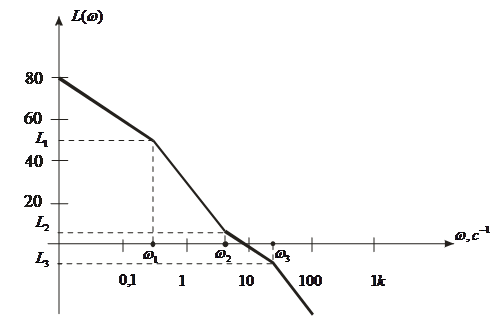
L/W(jω)/:
20 lgК = 20 lg600 = 20 · 2,7782 = 55
ωу = 1/Ту = 1/0,02 = 50 1/с ;
lg50 = 1,7
ωд = 1/Тм = 1/0,1 = 10 1/с ;
lg10 = 1,0
L/Wж (jω)/:
4×p 4 × 3,14
ωср = tпп = 0,3 = 42 1/с ;
lg42 = 1,6
ω3 = 3 × 42 = 126 1/с ;
lg126 = 2,1
ω2 = ω3/10 = 126/10 = 12,6 1/с ;
lg12,6 = 1,1
ω1 = lg1,15 = 0,06
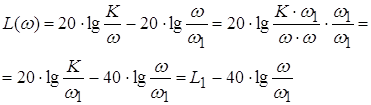
К _
Wисх(jω) = jω (Тм jω + 1)(Ту jω + 1)
К(Т2 jω + 1) _
Wж(jω) = jω (Т1 jω + 1)(Т3 jω + 1)²
Φ/Wисх (jω)/:
φисх = -90˚- arctgTy·ω - arctgTM·ω
φисх(ω1) = -90˚- arctg0,02· 1,15 – arctg0,1· 1,15 = - 98˚
φисх(ω2) = -90˚- arctg0,02· 12,6 – arctg0,1· 12,6 = - 156˚
φисх(ωср) = -90˚- arctg0,02· 42 – arctg0,1· 42 = - 207˚
Φ/Wж(jω)/:
φж = -90˚- arctgT1·ω –2· arctgT3·ω + arctgT2·ω
T1=1/ω1=1/1,15=0,87с; T2=1/ω2 =1/12,6= 0,08с; T3=1/ω3 =1/126= 0,008с
φж(ω1) = -90˚- arctg0,87·1,15 – 2· arctg 0,008· 1,15 + arctg0,08· 1,15 = - 131˚
φж(ω2) = -90˚- arctg0,87·12,6 – 2· arctg 0,008· 12,6 + arctg0,08· 12,6 = - 139˚
φж(ωср) = -90˚- arctg0,87· 42 – 2· arctg 0,008· 42 + arctg0,08· 42 = - 140˚
φж(ω3) = -90˚- arctg0,87· 126 – 2· arctg 0,008· 126 + arctg0,08· 126 = - 186˚
Δφ = - 180˚- φж(ωср) = - 180˚- (- 140˚) = 40˚
ΔL = 14дБ
7.
Требуемая ЛАЧХ должна быть получена при введении корректирующего устройства в виде обратных связей ( по заданию ) .
Применение отрицательных обратных связей в качестве корректирующих устройств имеет ряд преимуществ . Они снижают влияние нелинейных характеристик тех участков цепи регулирования , которые охватываются обратными связями, снимают чувствительность к изменению параметров звеньев , уменьшают постоянные времени звеньев, охваченных обратной связью. На практике при проектировании следящих систем обратной связью чаще охватываются усилитеьные и исполнительные устройства.
Передаточная функция части системы , охваченной обратной связью, имеет вид: Wохв(P) _
Wобщ(P) = (Wохв(P) Wос(P) + 1)
Передаточная функция всей скорректированной системы определяется выражением:
Wск(P) = Wобщ(P) Wн(P)
где Wн(P) – произведение передаточных функций последовательно включенных звеньев основного канала , не охваченных обратной связью;
Найдем передаточную функцию обратной связи Wос(P) с использованием передаточной функции системы с последовательным корректирующим устройством.
![]()
![]()
1 1 _ Ky СW _
Wос(P) = Wохв(P) Wк(P) – 1 ; Wохв(P) = Р(TyP + 1) (TмP + 1)
L/Wк (jω)/ = L/Wж (jω)/ - L/Wисх (jω)/
По разности этих характеристик определяется тип корректирующего устройства и выбираются его параметры .
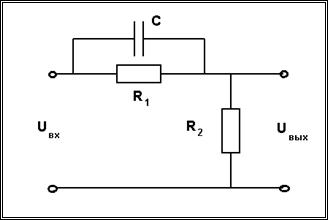
В нашем случае используем часто применяемый в следящих системах с последовательным корректирующим устройством интегродифференци-рующий контур с передаточной функцией:
(Т1Р + 1)(Т2Р + 1)
Wк(P) = (Т3Р + 1)(Т4Р + 1)
Известно, что для коррекции обратной связью на основании интегродифференцирующего контура существует передаточная функция:
Т'Р _
Wос(P)= (Т1Р + 1)
Эта передаточная функция соответствует передаточной функции дифференцирующего контура.
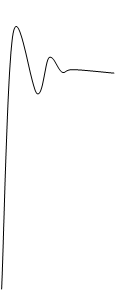
10.
Построим переходной процесс одним из численных методов с приме-нением ЭВМ.
|
![]()
![]()
![]()
![]()
|
![]()
|
По этому графику переходного процесса проведем анализ качества следящей системы с выбранным корректирующим устройством.
Переходной процесс характеризуется перерегулированием δ = 28 % и заканчивается за время tрег = 0,02 с
Список литературы
1. А.А. Ахметжанов, А.В. Кочемасов «Следящие системы и регуляторы» для студентов вузов. - М. : Энергоатомиздат, 1986г.
2. Смирнова В.И., Петров Ю.А., Разинцев В.И. «Основы проектирования и расчета следящих систем». - М. : Машиностроение, 1983г.
3. Бесекерский В.А., Попов Е.П. «Теория систем автоматического регулирования». – М. : Наука, 1972г.
Похожие работы
... переходного процесса для системы с дискретным корректирующим звеном. 2.6.8. Определение рекуррентного уравнения дискретного корректирующего звена. 2.6.9. Разработка принципиальной схемы цифровой следящей системы. 2.7. Расчетно-пояснительная записка должна содержать следующие разделы. 2.7.1. Введение (цель выполнения работы, описание следящей системы, принцип ее ...

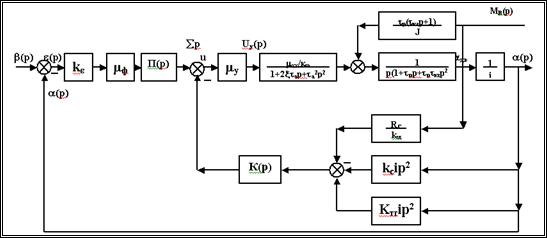

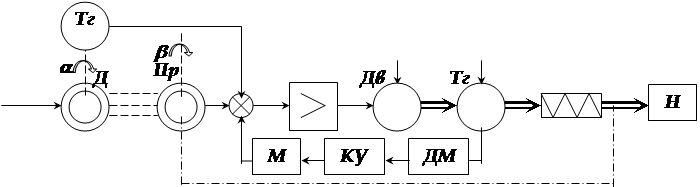
ьной обратной связью по току и по скорости Принципиальная схема проектируемой следящей системы. 1.1 Основные элементы принципиальной схемы следящей системы ФЧВ – фазочувствительный выпрямитель осуществляет выпрямление сигнала переменного тока в сигнал постоянного тока с учетом знака. П(р) – последовательное корректирующее устройство обеспечивает введение в закон управления сигнала ...
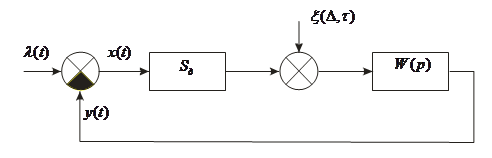
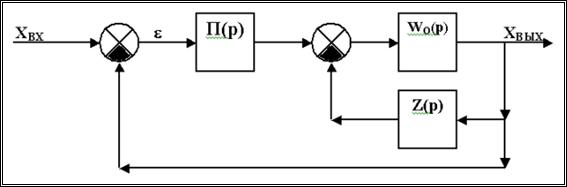
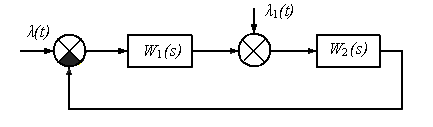
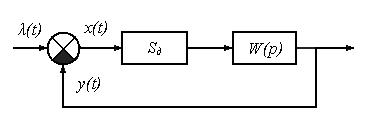
... в точке подачи обратной связи и определяется как передаточная функция от ошибки x(t) к управляемой величине y(t) . Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы Основная передаточная функция – передаточная функция замкнутой системы. Определяется отношением изображений по Лапласу управляемой величины и задающего воздействия: где Передаточная ...
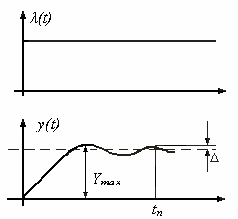
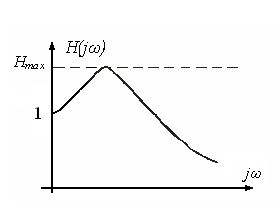
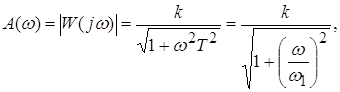
... звенья, у которых Н(0) = 1, показателем колебательности является абсолютный максимум АЧХ (рис.2): . Рекомендуемые значения показателя колебательности - 1,1…1.5. Анализ установившейся (динамической) ошибки Оценка показателей качества следящей системы производится при следующих типовых воздействиях: - линейное; - квадратичное; - полиномиальное. Линейное воздействие имеет место, в ...
0 комментариев