Навигация
ПОБУДОВА ЦИФРОВОГО ФІЛЬТРА
69468
знаков
35
таблиц
0
изображений
1. ПОБУДОВА ЦИФРОВОГО ФІЛЬТРА
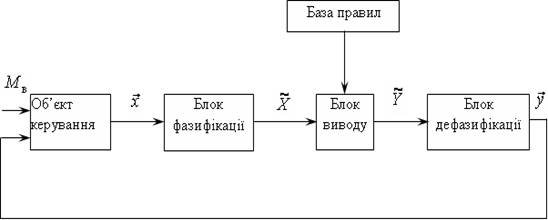
Кожний неперервний сигнал, що представляється змінною в часі напругою, характеризується своїм спектром частот. Будь-яка частота або полоса частот може бути посилена, послаблена, виключена або виділена фільтрацією. Фільтрація – це процес зміни спектра частот сигнала. Прикладом фільтрації сигналів може служити виключення шумів, визваних недосконалістю каналів передачі, розділення двох або більше сигналів, спеціально змішаних для збільшення пропускної здатності канала зв’язку, демодуляція сигналів. Будь-який неперервний сигнал, спектр якого обмежений верхніми частотами, може бути представлений у вигляді послідовності своїх значень, що розділені один від одного проміжками часу .
Цифровий фільтр – пристрій, який дозволяє перетворити дискретизований сигнал x(t) у інший y(t). Це цифрова схема для зміни частотного спектра дискретних сигналів. Цифровий фільтр може бути реалізований як апаратурно, так і програмно. При апаратурній реалізації необхідними схемними елементами є перемножувачі, суматори і елементи затримки [1].
Задано
рівняння
автоматичного
регулювання
вхідного x(t) та
вихідного y(t)
сигналів:
(1.1).
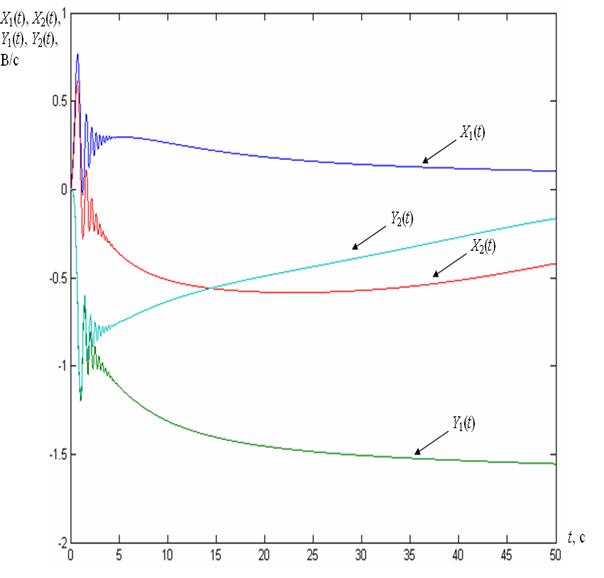
У даному рівнянні x(t) – вхідний сигнал, який є відхиленням від еталонного сигналу, y(t) – керуючий сигнал, який подається з системи регулювання на об’єкт керування, – стала часу, – частота.
Дискретизація аналогового рівняння полягає в заміні безперервної величини її дискретними відліками (1.2) і відповідними перетвореннями похідних.
Дискретизація першої похідної: (1.3).
Дискретизація другої похідної: (1.4).
Звідси випливає: .(1.5).
Спростимо вираз:
(1.6)
Здійснимо заміну:
, , (1.7).
Тоді:
(1.8)
при
(1.9).
Дане рівняння є рекурсивним фільтром, оскільки присутні члени yn-1 та yn-2.
Звідси, структурна схема реалізації цифрового фільтру зображена на рис.1.1.
Рис 1.1 Структурна схема реалізації цифрового фільтра;
ХУ – елементи множення, DL – елементи затримки, – суматор.
Недоліками цифрових фільтрів, які реалізовані на основі МП (наприклад, серія КР580, яка використовується), є обмежена швидкодія.
1.1 Побудова аналогової схеми
При побудові аналогової схеми, яка відповідає заданому пропорційно-диференційному рівнянню (1.8)
використовуємо перетворення Лапласа [9]:
(1.10)
Коефіцієнт при х(р) має вид дробово-раціонального виразу, в якому знаменник є сумою зображень за Лапласом опорів резистора, конденсатора та індуктивності ( в залежності від порядку заданого рівняння), а чисельник є частиною цієї суми. Вид цього дробово-раціонального виразу визначає аналогову схему.
Підставимо у рівняння перетворення Лапласа:
(1.11)
Отримане алгебраїчне рівняння розв’яжемо відносно у(р):
. (1.12)
Домножимо чисельник і знаменник на . Отримаємо:
(1.13).
А це еквівалентно рівнянню Г-подібного фільтра з Г-подібним входом з рівнянням
(1.14)
із відомою схемою (рис. 1.2):
рис. 1.2 Схема Г-подібного фільтру з Г-подібним входом
В отриманому нами виразі знаменник являє собою опір послідовного коливального кола з втратами, а чисельник є опором конденсатора, тобто аналогова схема являє собою послідовне з’єднання резистора, індуктивності та ємності, причому вихідна напруга знімається з конденсатора.
Тому Z1 = ZR+ ZL; Z2= ZC (1.15),
де (1.16).
Тут k – довільна стала.
Т
обто
схема реалізації
даного фільтру
має такий вигляд:
рис. 1.3 Аналогова схема, яка описується заданим рівнянням
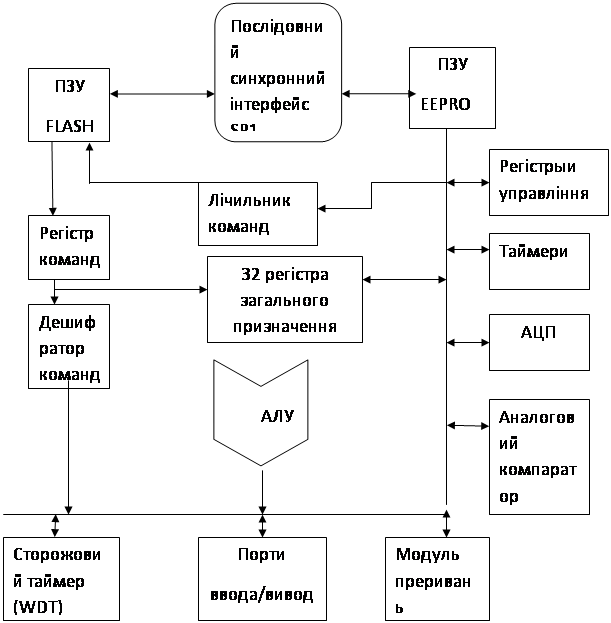
2. Структурна схема МП-пристрою
Мікропроцесорний пристій – функціонально і конструктивно закінчений пристрій, який представляє собою схемно-конструктивне з’єднання декількох схем, який включає один або декілька мікропроцесорів, призначений для отримання, обробки, передачі, перетворення та керування інформацією.
Для мікропроцесорних пристроїв характерна шинна структура, під якою розуміється те, що всі компоненти МП - пристрою під’єднані до так званої системної шини – набору ліній, що з’єднують елементи системи [1].
Структурна схема можливої реалізації проектованого МП-пристрою наступна (рис. 2.1).
рис. 2.1 Структурна схема МПП
де:
МП – мікропроцесор;
ПЗП – постійний запам’ятовуючий пристрій;
ТГ – тактовий генератор;
ОЗП – оперативний запам’ятовуючий пристрій;
СК – системний контролер;
АЦП – аналого-цифровий перетворювач;
ЦАП – цифро - аналоговий перетворювач;
ДШП – дешифратор адрес пам’яті;
ДШВ/В – дешифратор адрес вводу/виводу.
Системна шина розділяється на три окремі шини:
ШД – шина даних;
ША – шина адрес;
ШК – шина керування.
Лінії системної шини характеризується спрямованістю (тобто хто з пристроїв є визначальним за рівнем сигналу). Тут ШД – двоспрямована; ША – односпрямована; ШК – набір окремих ліній, що мають свій напрям. За рахунок того, що виводи всіх компонент МП - пристрою під’єднані до СШ, вони повинні мати крім станів, що забезпечують логічний 0 чи 1 на виході третій стан, стан з високим вихідним опором.
Опишемо складові МПС.
Мікропроцесор в складі МП-пристрою виконує функції:
формує адреси команд,
видає команди з пам’яті,
їх дешифрує,
видає для них команди потрібні адреси, виконує над ними опереції – передбачені команди, при неодхідності записує результат в пам’ять,
формує керуючі сигнали для обміну, реагує на можливі зовнішні сигнали.
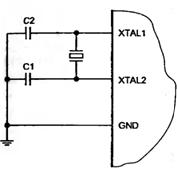
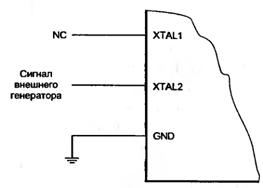
Тактовий генератор призначений для формування синхроімпульсів для роботи МП і інших пристроїв МП. Синхроімпульси мають амплітуду 12B, але відрізняються один від одного щільністю і є зсунуті. Крім того мікросхема КР580ГФ24, яка виконує функцію ТГ, приймає участь в прийомі та видачі керучих сигналів СШ.
ПЗП служить для постійного зберігання потрібних даних і програм. У випадку даного цифрового фільтру він зберігає програму, за якою працює цифровий фільтр, а також постійні коефіціенти.
ОЗП служить для тимчасового зберігання інформації, потрібної для розрахунків.
СК виконує 3 функції:
фіксація слова стану процесора;
формування частини сигналів, які належать шині керування МПС;
буферизація шини даних.
Він формує керуючі сигнали по сигналам стану МП при зверненні до ЗП: RD i WR, при зверненні до ПВВ: RDIO, WRIO, INTA. А також забезпечує прийом і передачу 8-розрядної інформації між каналом данихМП по виходам D7 – D0 і системним каналом по DB7–DB0. Він складається з двонаправленої буферної схеми даних, регістрів стану і дешифраторів керуючих сигналів.
ППІ в даному МП-пристрої служить для обміну інформацією між МП і зовнішніми пристроями АЦП і ЦАП. Крім того, в склад МП-пристрою входять такі допоміжні елементи, як буферний регістр для організації переривань RST 7, окремі логічні елементи, дешифратори.
Похожие работы
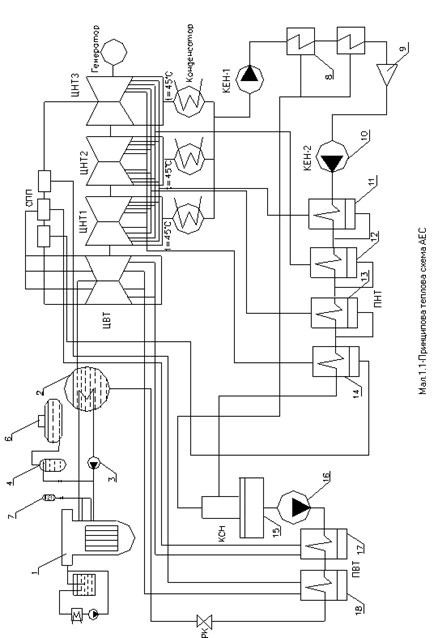

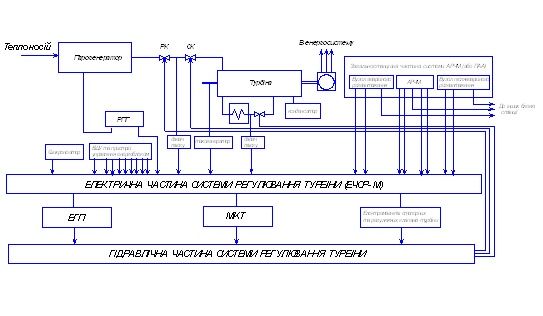
... , звитих в плоскі спіралі. Кінці спіралей приварені до трьох роздаючих і до трьох колекторних труб. 2. Призначення, склад, технічні характеристики системи автоматичного регулювання 2.1 Призначення системи автоматичного регулювання Система автоматичного регулювання (САР) турбіни виконується електрогідравлічною і структурно складається з електричної і гідравлічної частин, робота яких взає ...
... випадків, аварій, а з цим і простоїв на підприємстві, укріпити та створити культуру трудової діяльності. Виконання та розробка дипломного проекту “ Розробка дослідження системи керування електроприводом змінного струму дизель-потягу з використанням нейронних мереж ” відбувається за допомогою комп'ютера, тому питання охорони праці розглядаються щодо забезпечення здорових і безпечних умов роботи ...
... дображення стану систем і т. п. В курсовому проекті я розробляю лічильник, який рахує число людей. 1.Основна частина 1.1 Розробка технічного завдання Загальні відомості: Мікропроцесорній пристрій, який рахує число імпульсів готової продукції. Призначення розробки: розробка МПС з навчальною метою. Вимоги до МПС: Тип МК ATtiny2313, індикація на 2 розряда, число імпульсів – 10, індикац ...
... ів визначається технічними вимогами, що пред'являються до процесу вимірювання температури.Термопара (термоелектричний перетворювач) складається з двох з'єднаних на одному з кінців провідників, виготовлених із металів, що володіють різними термоелектричними властивостями. Рис.13. Термопара(схеми) З'єднані кінці, які звуться робочим спаєм, опускають у вимірюване середовище, а вільні кінці ( ...
0 комментариев