Навигация
Програма цифрової обробки інформації
69468
знаков
35
таблиц
0
изображений
6. Програма цифрової обробки інформації.
Аналізуючи алгоритм функціонування МП–пристрою, ми бачимо, що нам потрібно використовувати такі операції:
множення однобайтового слова на однобайтове;
додовання однобайтових слів (це можна здійснити за допомогою команди ADD).
В [2] наведені готові програми для здійснення цих операцій.
1. Множення однобайтових чисел без знаку:
| B | |
| * | |
| A | |
| H | L |
| 10 7 7 10 4 16 10 5 16 10 | MULL88: Z1: Z2: | LXI H, 0 MVI D, 0 MVI C, 8 DAD H RLC JNC Z2 DAD D DCR C JNZ Z1 RET |
Коефіцієнти а0, b0, c0в пам'яті зберігаються у вигляді модуля.
Основна програма враховує, що c0 є від'ємний.
Користуючись алгоритмом програми обробки переривання і вищесказаним, програма обробки переривання на мові асемблеру буде (вона зберігається за адресою 8*7)[8]:
| 4 11 11 10 5 16 7 10 10 10 4 10 | OP: | D1 PUSH H PUSH PSW IN 0A0H LDA 500H SHLD XNI MVI A, 9H OUT 0A2H POP PSW POP H EI RET | ;заборона переривань ;Ввід в програму розрядів X0X7 ;гашення результату ;Дозвіл переривання |
Основна програма, за алгоритмом, починається з ініціалізації мікросхеми K580ВВ55 для обміну з ЦАП і АЦП, після того АЦП встановлюється (після гасіння) в режим перетворення вхідного сигналу. Далі іде циклічний підрахунок і виведення результату.
Основна програма:
| 7 7 13 7 13 7 13 10 7 10 7 10 7 10 13 5 13 17 13 13 5 13 17 13 4 13 13 5 13 17 13 4 13 13 13 13 13 13 10 5 10 10 7 | START: | ORG 100,H MVI A, a0 STA 501H MVI A, b0 STA 502H MVI A, c0 STA 503H LXI SP, 4FFH MVI A, 90H OUT 0A3H MVI A, 9H OUT 0A2H MVI A, 8H OUT 0A2H LDA 500H MOV B, A LDA 501H CALL MULL88 STA 504H LDA 505H MOV B, A LDA 502H CALL MULL88 LDA 504H ADD H STA 504H LDA 503H MOV B, A LDA 506H CALL MULL88 LDA 504H SUB H STA 504 H LDA 505H STA 506H LDA 504H STA 505H LDA 504H OUT 0A1H MOV A, 8H OUT 0A3H JMP START HLT | ; занесення в пам’ять коефіцієнтів ; ініціалізація ППІ ; запуск АЦП ;занесення в програму xn ; занесення коефіцієнту а0 ; визначення a0*xn ; занесення в комірку для yn ; занесення в програму значення yn-1 ; занесення коефіцієнту b0 ; визначення b0*yn-1 ; додавання b0*yn-1 і а0*хn ; занесення в комірку для yn ; занесення коефіцієнту с0 ; занесення в програму значення yn-2 ; визначення с0*yn-2 ; визначення b0*yn-1 + а0*хn - с0*yn-2 ; занесення в комірку для yn ; занесення yn-1 в комірку для yn-2 ; занесення yn в комірку для yn-1 ; вивід результату ; вивід логічного 0 в розряд С4 для ; перехід на початок |
Похожие работы
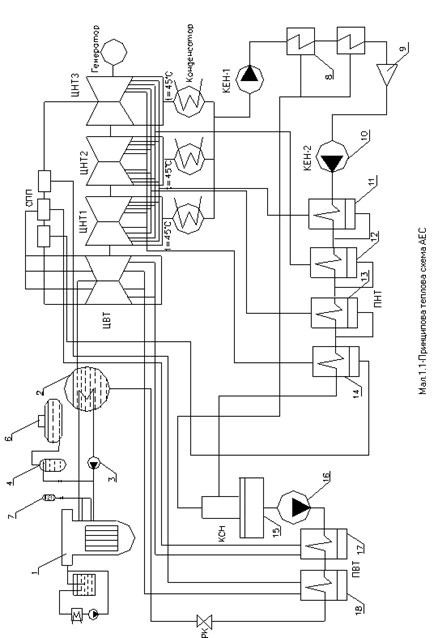

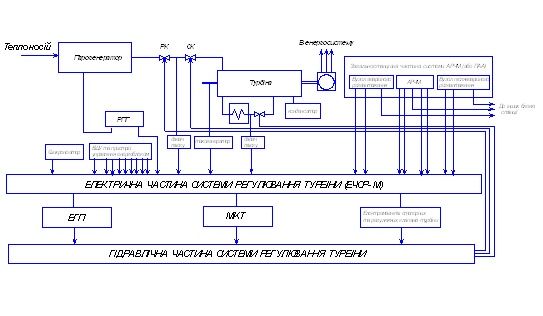
... , звитих в плоскі спіралі. Кінці спіралей приварені до трьох роздаючих і до трьох колекторних труб. 2. Призначення, склад, технічні характеристики системи автоматичного регулювання 2.1 Призначення системи автоматичного регулювання Система автоматичного регулювання (САР) турбіни виконується електрогідравлічною і структурно складається з електричної і гідравлічної частин, робота яких взає ...
... випадків, аварій, а з цим і простоїв на підприємстві, укріпити та створити культуру трудової діяльності. Виконання та розробка дипломного проекту “ Розробка дослідження системи керування електроприводом змінного струму дизель-потягу з використанням нейронних мереж ” відбувається за допомогою комп'ютера, тому питання охорони праці розглядаються щодо забезпечення здорових і безпечних умов роботи ...
... дображення стану систем і т. п. В курсовому проекті я розробляю лічильник, який рахує число людей. 1.Основна частина 1.1 Розробка технічного завдання Загальні відомості: Мікропроцесорній пристрій, який рахує число імпульсів готової продукції. Призначення розробки: розробка МПС з навчальною метою. Вимоги до МПС: Тип МК ATtiny2313, індикація на 2 розряда, число імпульсів – 10, індикац ...
... ів визначається технічними вимогами, що пред'являються до процесу вимірювання температури.Термопара (термоелектричний перетворювач) складається з двох з'єднаних на одному з кінців провідників, виготовлених із металів, що володіють різними термоелектричними властивостями. Рис.13. Термопара(схеми) З'єднані кінці, які звуться робочим спаєм, опускають у вимірюване середовище, а вільні кінці ( ...
0 комментариев