Навигация
По виду статической характеристики: нереверсивный и реверсивный;
29732
знака
5
таблиц
0
изображений
1. по виду статической характеристики: нереверсивный и реверсивный;
2. по типу обратной связи (ОС): БМР без ОС; БМР с внутренней ОС; БМР с внешней ОС; БМР со смешанной ОС.
БМР отличаются высокой надежностью; способностью суммировать входные сигналы; немедленной готовностью к работе; удобно согласуются с источником входного сигнала и нагрузкой; имеют низкий порог чувствительности (до 10-19 Вт); большую выходную мощность (105 Вт); высокий КПД (0,7 - 0,95); высокий коэффициент усиления по мощности.
Данная курсовая работа посвящена проектированию одного из БМР. Внутренняя ПОС достигается тем, что постоянная составляющая имеет величину, которая зависит от величины входного сигнала и создает поле, которое или складывается, или вычитается из поля входного сигнала.
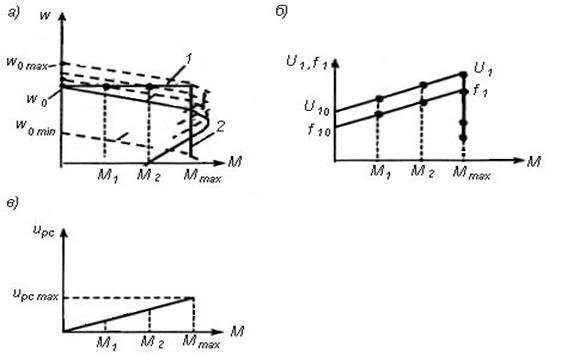
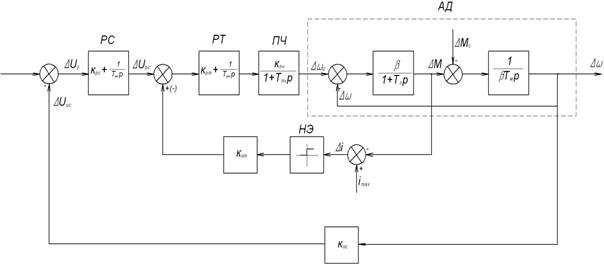
КРАТКОЕ ОПИСАНИЕ ПРИНЦИПА ДЕЙСТВИЯ ПРОЕКТИРУЕМОГО БМРРассмотрим работу элементарной схемы (рис. 1, а), которая является основой всех схем усилителей с самонасыщением. Пусть напряжение, питающее рабочую цепь схемы uc, синусоидально (рис. 1, г), а вентиль Д - близок к идеальному. остановимся на режиме вынужденного намагничивания при Iy = const, создающем напряженность Hy.
Работу схемы удобно разделить на рабочий полупериод, когда напряжение схемы uc стремится закрыть вентиль, а индукция приобретает значение, соответствующее напряженности управляющего сигнала Hy.
Примем за исходное положение рабочую точку 1 на статистической петле гистерезиса (рис. 1, б). Предположим сначала (для упрощения), что точка 1 совпадает во времени с началом рабочего полупериода.
Под действием напряжения uc, приложенного к обмотке wp, через открытый в рабочий полупериод вентиль проходит ток ip, создающий напряженность Hp (рис. 1, а и б), направленную противоположно напряженности Hy и заставляющую рабочую точку перемещаться по частному циклу на участке 1 - 2. При этом питающее напряжение почти полностью уравновешивается на данном участке ЭДС e (рис. 1, г), наводящейся в обмотке wp. Скорость изменения индукции dB/dt в каждый момент времени определяется мгновенным значением этой ЭДС, а напряженность - частным циклом динамической петли гистерезиса. Ток ip, пропорциональный напряженности Hp, создает небольшое падение напряжения (заштриховано на рис. 1, г) на суммарном активном сопротивлении рабочей цепи, состоящем из сопротивления нагрузки Rн, активного сопротивления рабочей обмотки Rр и активного сопротивления вентиля в открытом состоянии Rд:
R = Rн + Rp + Rд (1)
В момент времени, обозначенный s на рис.1, индукция достигает насыщения (точка 2 на рис.1, д) и, следовательно, престает изменяться. ЭДС е падает до нуля, переставая уравновешивать напряжение uс . Ток ip скачком возрастает (участок 2 - 3 на рис.1, е) и напряжение uс в оставшуюся часть рабочего полупериода полностью уравновешивается падением напряжения на суммарном активном сопротивлении рабочей цепи. При этом рабочая точка перемещается по насыщенному участку петли гистерезиса (принятому горизонтальным) сначала на участке 2 - 3 (рис. 1, б), а затем по мере уменьшения напряжения uс и пропорционального ему тока ip на участке 3 - 4, достигая в точке 4 начала нисходящего (вертикального) участка статической петли.
Казалось бы, что ток ip в рабочей цепи должен прекратиться и вентиль запереться в момент перехода питающего напряжения через нуль. Однако, начиная с момента 4, под действием разности напряженностей Hy - Нp (имеются в виду их абсолютные значения) сердечник начинает размагничиваться, т.е. рабочая точка опускается по нисходящему участку петли гистерезиса (участок 4 - 5 на рис. 1, б). Индукция на этом участке изменяется и в обмотке wp наводится ЭДС, поддерживающая ток iр в рабочей цепи (рис. 1, г, д и е).
Когда напряжение uс (оно отрицательно в управляющий полупериод и стремится запереть вентиль) будет по абсолютной величине больше ЭДС е, вентиль запрется и ток iр прекратится (точка 5). На участке 5 - 6 сердечник находится под действием только Hy, которая и определяет скорость изменения индукции на этом участке. При принятой прямоугольной аппроксимации петли гистерезиса эта скорость B/t (а значит, и ЭДС е) будет постоянной и ее величина будет определяться шириной динамической петли в точке Hy = Нс. дин.
К Концу управляющего полупериода, когда напряжение uc становится меньше ЭДС е (рис. 1, г), вентиль снова может открыться (точка 6) и появится ток iр. Разность напряжений Нy - Hp будет уменьшаться, а скорость изменения индукции и ЭДС - снижаться (участок 6 - 1), пока в точке 1 индукция не достигнет статической петли гистерезиса и ЭДС в обмотке wp не обратится в нуль. Таким образом, процесс размагничивания может закончиться (точка 1) лишь в начале следующего, рабочего полупериода.
Назовем выходным напряжением падение напряжения, создаваемое током ip на суммарном активном сопротивлении рабочей цепи (1). Управление этим напряжением происходит следующим образом. При большем (по абсолютному значению) токе, а значит, и напряженности управления размагничивание будет происходить по более широкой петле гистерезиса и с большей скоростью изменения индукции, тока 1 в управляющий полупериод опустится ниже и в рабочий полупериод индукция дольше будет находится на участке 1- 2. Рабочая точка позднее достигнет точки насыщения 2, угол s увеличится и выходное напряжение (заштрихованная площадь) станет меньше.
На рис. 1, б пунктиром показано перемещение рабочей точки по предельному для данной частоты питающего напряжения циклу, при котором в точке 1’ индукция достигает насыщения Bs . Ширина предельного цикла характеризуется напряженностью Hc дин.пред. . В этом случае, очевидно, ЭДС рабочей обмотки уравновесит наибольшую возможную часть напряжения Uc и выходное напряжение станет минимальным (режим холостого хода).
При уменьшении по абсолютному значению тока управления напряжение на выходе возрастает, достигая наибольшего значения при напряженности Hy, соответствующей точке 4, когда рабочая точка будет перемещаться только по насыщенному горизонтальному участку петли 4 - 3 - 4, не достигая нисходящей ее части.
Выходное напряжение будет оставаться наибольшим и при Hy 0, потому что размагничивания в управляющий полупериод происходить не будет.
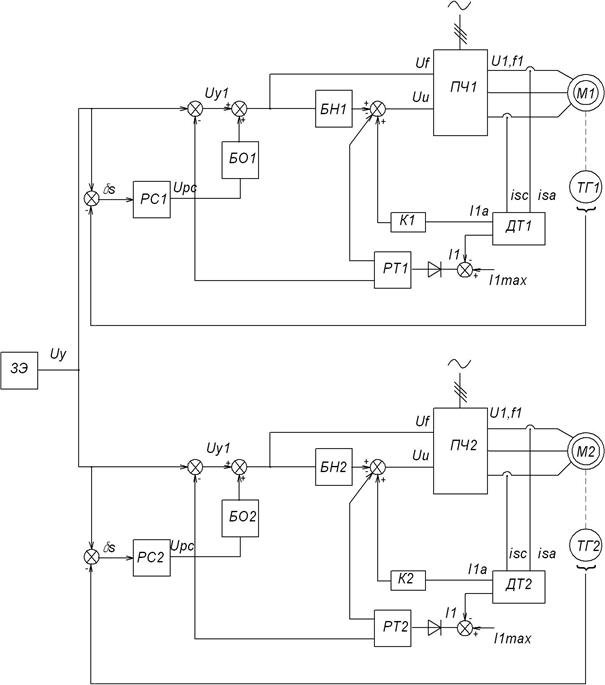
В рассмотренной элементарной схеме в обмотке wy наводится переменная ЭДС. Для ее уменьшения магнитные усилители с самонасыщением выполняют из двух элементарных схем (рис. 2). Обмотки wр и диоды соединят так, чтобы в одно и то же время один из сердечников находился в состоянии управляющего полупериода, а другой - рабочего. Так как кривые изменения индукции в рабочий и управляющий полупериоды близки по своему характеру (рис. 1, д) и направлены в противоположные стороны, то их действие на обмотку управления частично компенсируется и в ней наводятся только четные гармоники ЭДС, а основная и нечетная гармоники подавляются, как в дроссельном усилителе.
Если усилитель работает в режиме вынужденного намагничивания, то можно считать, что процессы в каждом сердечнике аналогичны рассмотренным на рис. 1, но сдвинуты на полпериода.
2. РАСЧЕТ БЕСКОНТАКТНОГО МАГНИТНОГО РЕЛЕ
2.1. Расчет удельного сопротивления материала провода при рабочей температуре БМР.
= 0 (1 + ) (1)
0 - удельное сопротивление провода при температуре t0C;
- температурный коэффициент материала провода;
- превышение температуры над t0C .
для медного провода при t00 = 200С:
= 0.004 град-1;
= 1.75 10-8 Омм;
= доп + tокр0 - t00
= 60 + 35- 20 = 750
= 1.75 10-8 (1 + 0.004 65) = 2.2 10-8 (Омм)
2.2. Выбор материала магнитопроводаМатериал магнитопровода: 79HM
2.2.1. Толщина ленты магнитопровода:
(2)
0.096
2.2.2. Из промышленного ряда толщин выбираем = 0.05 мм.
По табл. 7.1 [2] задаемся способом изготовления сердечника: ленточный торроидальный из железоникелевых сплавов; вид изоляции – накатывание.
Коэффициент заполнения стали: kc =0.85
2.2.3. По динамической кривой размагничивания (приложение1) определяем координаты точек M и N.
2.2.4. Амплитудное значение магнитной индукции:
0.66 (3)
2.2.5 Коэффициент, учитывающий неполное насыщение сердечников в номинальном режиме:
(4)
0.871
2.3. Определение размеров сердечника и предварительный расчет обмоток2.3.1 Задаемся необходимыми параметрами и определяем Г1.
= 60
р = 0.85 0.9 — относительная площадь рабочей обмотки
р = 1 — относительная длина витков рабочей обмотки.
кmp = 0.30.4 — коэффициент заполнения по меди рабочей обмотки.
кт = 10 Вт/(м * 0С) - коэффициент теплоотдачи катушки;
кс = 0.85 - коэффициент заполнения по стали;
=1 - коэффициент полезного действия рабочей цепи.
Кфр =1.11 – коэффициент формы рабочего тока
(5)
Т. к. для данной частоты (400 Гц) Г1>0.4 то расчет ведем следующим образом:
2.3.2. Уточняем параметры kт и .
(6)
Вт/(м * 0С)
(7)
2.3.3. Рассчитываем второе приближение фактора Г1.
(8)
2.3.4.Предварительный расчет показал, что для размещения обмоток требуется сердечник с Г1 = 4.51.
d = 28 mm - внутренний диаметр тора;
D = 40 mm - внешний диаметр тора;
b = 10 mm - высота тора;
s = 0.6 cm2 - поперечное сечение магнитопровода;
lc = 10.7 cm - средняя длина магнитной линии;
lМ = 5.28 cm - средняя длина всей обмотки.
Похожие работы
... 284 Объектом курсового проектирования является двухскиповая подъемная установка главного ствола. Целью курсового проектирования является автоматизация подъемной скиповой установки с асинхронным приводом. 1.1. Общие требования к аппаратуре ...
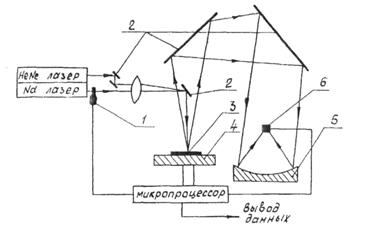

... (рис.4). Рис.4. Схема лазерного контроля паяных соединений За счет этой системы удается контролировать около десяти паяных соединений в секунду, которые расположены на расстоянии 1,25 мм друг от друга. 2. Технология магнитных дисков (МД) является сложной: объединяет сотни операций, выполняемых на нескольких десятках единиц нестандартного технологического оборудования; многие параметры, ...

... и материалов, проведением монтажных и пусконаладочных работ. Сметный расчёт стоимости данных затрат приведён в приложениях. Таблица 5.1 – Расходы на проектирование, закупку оборудования и материалов и производство работ по системе охранной сигнализации пожаре. Наименование статей затрат Стоимость в текущих ценах, руб. Оборудование 833 915 Материалы 347 930 Монтажные работы 3213388 ...

... +474,98+240+1300=12814,98+15% =14737,22≈14800м2. Основные данные для расчетов складов шихтовых, а также способы хранения основных материалов приводятся в табл. (см. лит.1). В фасонно-сталелитейных цехах с индукционными печами шихтовой двор обслуживается подъездным путем и мостовым магнитным краном. Шихтовые материалы хранятся в закромах. Набор металлической шихты будут осуществлять с ...
0 комментариев