Навигация
Метод аппроксимации Фогеля
15346
знаков
5
таблиц
0
изображений
4.2. Метод аппроксимации Фогеля
При определении опорного плана транспортной задачи методом аппроксимации Фогеля находят разность по всем столбцам и по всем строкам между двумя записанными в них минимальными тарифами. Эти разности записывают в специально отведенных для этого строке и столбце в таблице условий задачи. Среди указанных разностей выбирают минимальную. В строке (или в столбце), которой данная разность соответствует, определяют минимальная стоимость.
Если минимальная стоимость одинакова для нескольких клеток столбца (строки), то для заполнения выбирают ту клетку, которая расположена в столбце (строке), соответствующем наибольшей разности между двумя минимальными стоимостями, находящимися в данном столбце (строке).
Пример
Найти методом аппроксимации Фогеля первоначальный опорный план транспортной задачи:
(Здесь мы перенесли потребности в верхнюю строку для удобства построения плана). Рассмотрим задачу, приведенную для методов северо-западного угла и минимального элемента
Решение:
| 10 | 20 | 10 | ||||
| 2 7 | 3 0 | 4 8 | 15 | 1 | 1 | 1 |
| 11 0 | 6 1 | 10 0 | 1 | 4 | 4 | - |
| 8 3 | 9 0 | 3 0 | 3 | 5 | - | - |
| 4 0 | 1 19 | 2 2 | 21 | 1 | 1 | - |
| 2 | 2 | 1 | ||||
| 2 | 2 | 2 | ||||
| 2 | 2 | 2 | ||||
| 2 | - | 2 | ||||
| - | - | 2 | ||||
| - | - | - | ||||
Опорный план имеет вид:
| 7 | 0 | 8 |
| 0 | 1 | 0 |
| 3 | 0 | 0 |
| 0 | 19 | 2 |
5. Методы определения оптимального плана
5.1. Венгерский метод
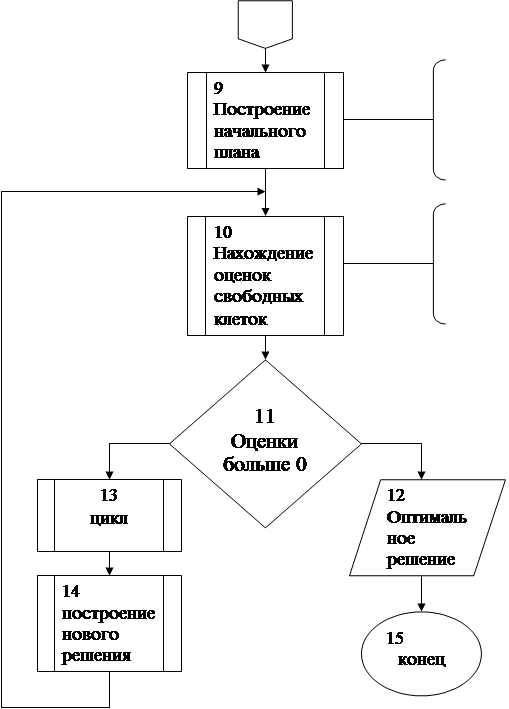
Идея метода была высказана венгерским математиком Эгервари и состоит в следующем. Строится начальный план перевозок, не удовлетворяющий в общем случае всем условиям задачи (из некоторых пунктов производства не весь продукт вывозится, потребность части пунктов потребления не полностью удовлетворена). Далее осуществляется переход к новому плану, более близкому к оптимальному. Последовательное применение этого приема за конечное число итераций приводит к решению задачи.
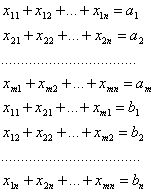
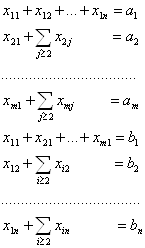
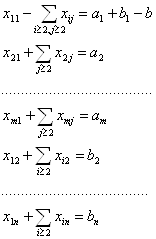
Алгоритм венгерского метода состоит из подготовительного этапа и из конечного числа итераций. На подготовительном этапе строится матрица X0 (xij[0])m,n, элементы которой неотрицательны и удовлетворяют неравенствам:
, i 1, …, m;
, j 1, …, m.
Если эти условия являются равенствами, то матрица Хo - решение транспортной задачи. Если среди условий имеются неравенства, то осуществляется переход к первой итерации. На k-й итерации строится матрица Хk (xij[0])m,n. Близость этой матрицы к решению задачи характеризует число Dk — суммарная невязка матрицы Хk:
.
В результате первой итерации строится матрица Хl, состоящая из неотрицательных элементов. При этом Dl D0. Если Dl 0, то Хl - оптимальное решение задачи. Если Dl 0, то переходят к следующей итерации. Они проводятся до тех пор, пока Dk при некотором k не станет равным нулю. Соответствующая матрица Хk является решением транспортной задачи.
Венгерский метод наиболее эффективен при решении транспортных задач с целочисленными объемами производства и потребления. В этом случае число итераций не превышает величины D0/2 (D0 - суммарная невязка подготовительного этапа).
Достоинством венгерского метода является возможность оценивать близость результата каждой из итераций к оптимальному плану перевозок. Это позволяет контролировать процесс вычислений и прекратить его при достижении определенных точностных показателей. Данное свойство существенно для задач большой размерности.
5.2. Метод потенциалов
Метод потенциалов является модификацией симплекс-метода решения задачи линейного программирования применительно к транспортной задаче. Он позволяет, отправляясь от некоторого допустимого решения, получить оптимальное решение за конечное число итераций. Общая схема отдельной итерации такова. По допустимому решению каждому пункту задачи сопоставляется число, называемое его предварительным потенциалом. Пунктам Аi соответствуют числа ui, пунктам Bj - числа vj. Они выбираются таким образом, чтобы их разность на k-й итерации была равна Сij - стоимости перевозки единицы продукции между пунктами Аi и Вj:
vj[k] – ui[k] Cij, i 1, ..., m; j 1, …, п.
Если разность предварительных потенциалов для каждой пары пунктов Аi, Вj не превосходит Сij, то полученный план перевозок является решением задачи. В противном случае указывается способ получения нового допустимого плана, связанного с меньшими транспортными издержками. За конечное число итераций находится оптимальный план задачи.
Список использованной литературы
Е. Г. Гольштейн, Д. Б. Юдин «Задачи линейного программирования транспортного типа», Москва, 1993. И. Л. Акулич, В. Ф. Стрельчонок «Математические методы и компьютерные технологии решения оптимизационных задач», Рига, 2000. www.fmi.asf.ruПохожие работы
... . При этом значения cij соответствуют коэффициентам целевой функции исходной замкнутой транспортной задачи (1) и в последующем не изменяются. Элементы xij соответствуют значениям переменных промежуточных решений транспортной задачи линейного программирования и изменяются на каждой итерации алгоритма. Если в некоторой ячейке xij=0, то такая ячейка называется свободной, если же xij>0, то такая ...
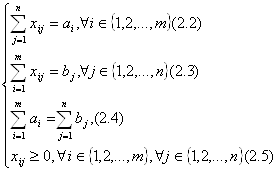
... , является линейной функцией переменных : (2.4) Требуется в области допустимых решений системы уравнений (2.1) и (2.1.1) найти решение, минимизирующее линейную функцию (2.4). Таким образом, мы видим, что транспортная задача является задачей линейного программирования. Для ее решения применяют также симплекс-метод, но в силу специфики задачи здесь можно обойтись без ...
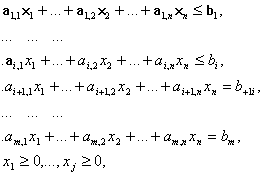
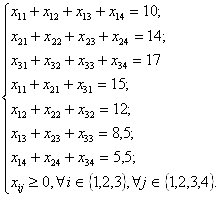
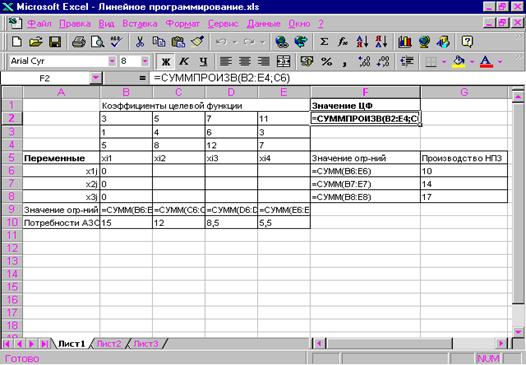
... задачи линейного программирования, они очень сложны и решаются специальными, обычно многостадийными приемами с использованием эвристических элементов. 3. Решение задач 3.1. Решение задачи линейного программирования 3.1.1.Постановка задачи Сформулируем задачу: Определить значения переменных, обеспечивающие минимизацию целевой функции. Составим целевую функцию и зададим ограничения. ...
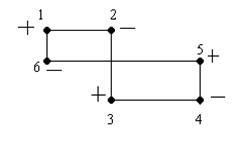
... . Система векторов условий транспортной задачи линейно независима тогда и только тогда, когда из соответствующих им клеток таблицы нельзя образовать ни одного цикла. Следовательно, допустимое решение транспортной задачи , i=1,2,…,m; j=1,2,…,n является опорным только в том случае, когда из занятых им клеток таблицы нельзя образовать ни одного цикла. Метод вычеркивания. Для проверки возможности ...
0 комментариев