Методы измерения отношения
Применение АРУ для нахождения отношения напряжений
Цифровой метод измерения отношения
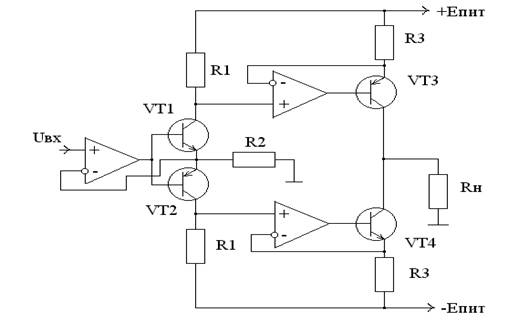
Дифференциальные каскады
РАЗРАБОТКА ПРИНЦИПОВ ПОСТРОЕНИЯ ИЗМЕРИТЕЛЯ ОТНОШЕНИЙ
Выбор типа микропроцессора
ТЕХНИКО–ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ
Формирование цены
Определение экономической эффективности
Шум и вибрация
Эргономика и техническая эстетика
Заземлители расположены в черноземе
ГРАЖДАНСКАЯ ОБОРОНА
Навигация
РАЗРАБОТКА ПРИНЦИПОВ ПОСТРОЕНИЯ ИЗМЕРИТЕЛЯ ОТНОШЕНИЙ
Устройство измерения отношения двух напряжений
83278
знаков
20
таблиц
10
изображений
2 РАЗРАБОТКА ПРИНЦИПОВ ПОСТРОЕНИЯ ИЗМЕРИТЕЛЯ ОТНОШЕНИЙ.
2.1 Функциональная схема
На основании выводов, сделанных в первом разделе проведем разработку функциональной схемы прибора. Эта схема приведена на рис.2.1.
Так как разрабатываемое устройство должно измерять отношения весьма малых напряжений ( от 10 мкВ до 10мВ ) то совершенно очевидно, что данные напряжения необходимо усиливать. Причём целесообразно данные напряжения усиливать по одному тракту усиления. Данное техническое решение позволит исключить дополнительную погрешность связанную с нестабильностью параметров элементов схемы. Два тракта усиления собранные на одной элементной базе будут всегда иметь небольшое различие в коэффициентах передачи из за временной нестабильности, (воздействие на схему различных дестабилизирующих факторов) и старения. В свою очередь это небольшое отличие является причиной неточности при измерении той или иной величины, например, как в данной работе, при измерении отношения двух напряжений. Кроме того, использование одного тракта усиления позволит уменьшить стоимость разрабатываемого устройства за счёт сокращения используемых элементов, что также не маловажно при проектировании реального устройства. Для реализации выбранного технического решения входные сигналы будем подавать на единый тракт усиления последовательно, через коммутатор К, управляемый центральным процессором П1.
Как было описано в первой главе данной работы, причиной большой погрешности в измерениях при усилении постоянных напряжений может являться дрейф нуля. Во избежание данного явления целесообразно перейти от постоянных напряжений к переменным. Этот переход можно осуществить при помощи коммутатора К, который последовательно будет подключать ко входу предварительного усилителя ПУ либо один из входных сигналов, либо общий провод, потенциал которого равен нулю. Таким образом, для осуществления схемы с одним трактом усиления и перехода от сигналов постоянного напряжения к сигналам с переменным напряжением используем трехканальный коммутатор, на один вход которого подается первый входной сигнал, на второй вход – второй входной сигнал. Третий вход коммутатора необходимо присоединить к общему проводу. Центральный процессор должен управлять коммутатором таким образом, чтобы на выходе коммутатора было сформировано две последовательности прямоугольных импульсов одинаковой частоты со скважностью равной двум. Причем амплитуды сформированных последовательностей будут равны величинам напряжений входных сигналов. (Рисунок 2.2)
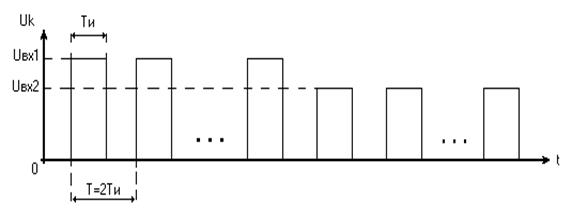
Рисунок 2.2 – Сигнал, формируемый на выходе коммутатора
Как уже было упомянуто выше, управляться четырехканальный коммутатор будет центральным микропроцессорным устройством. Причем частоту последовательностей прямоугольных импульсов выберем равной F=1 кГц. Частоту смены импульсных последовательностей следует выбрать исходя из расчётов времени, которое требуется на установление переходного процесса цифрового фильтра описанного далее, и времени, которое требуется процессору для выполнения заложенных в него алгоритмов обработки поступающей информации.
Далее сформированные коммутатором импульсные последовательности усиливаются предварительным усилителем ПУ. Так как поступаемый на вход ПУ сигнал имеет малый уровень (в худшем случае 10 мкВ в соответствии с техническим заданием), то усилитель, дабы не вносить большую погрешность в измерение требуемой величены, должен иметь малый коэффициент шума. Основным требованием, которому должен соответствовать выбираемый усилитель является низкий коэффициент шума. Поэтому следует выбрать малошумящий операционный усилитель. Коэффициент передачи по напряжению предварительного усилителя выберем позже.
Так как в соответствии с техническим заданием динамический диапазон входных напряжений достаточно большой (60 дБ ) то в тракте усиления необходимо использовать усилитель с переменным коэффициентом передачи. Это обеспечит сжатие динамического диапазона сигнала, поступающего на вход аналого-цифрового преобразователя АЦП. Такое решение позволяет резко снизить относительную погрешность, возникающую из-за квантования преобразуемого сигнала (абсолютное значение этой погрешности равно единице младшего разряда). Обратное расширение динамического диапазона будем осуществлять в центральном процессоре путем деления полученного кода на коэффициент усиления управляемого усилителя. Используем двуполярный двенадцатиразрядный АЦП с максимальной амплитудой сигналов подаваемых на АЦП равной Umax=2 В. В двенадцатиразрядном АЦП один разряд знаковый. Зная это можно найти число уровней квантования, которое равно N=211=2048. Тогда шаг квантования
![]() . (2.1)
. (2.1)
Относительную погрешность вносимую при оцифровке сигнала можно оценить как отношение шага квантования к входному сигналу.
![]() . (2.2)
. (2.2)
При максимальном значении амплитуды подаваемого на АЦП сигнала погрешность равна: δmin =(0,001/2)*100% =0,05%. Это будет минимальная погрешность вносимая АЦП. Подберём коэффициент передачи всего усилительного тракта таким образом, чтобы минимальная амплитуда сигнала подаваемого на вход АЦП была в два раза меньше максимального значения амплитуды, то есть 1 В. Погрешность при этом будет равна δmax=(0,001/1)*100% =0,1%. Это и будет максимальная погрешность АЦП. Для того чтобы погрешность не превышала данное значение, необходимо чтобы при любом значении входного сигнала, на АЦП поступала импульсная последовательность, амплитуда которой попадала бы в диапазон от 1 В до 2 В. Это можно реализовать при помощи управляемых усилителей УУ1-УУ3 коэффициенты передачи которых устанавливаются цифровым кодом с процессора.
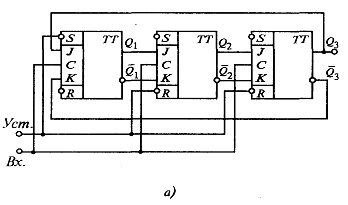
Для обеспечения заданного динамического диапазона используем три таких усилителя включённых каскадно. Коэффициент передачи каждого может быть равен 1, 2, 4, 8. Тогда диапазон изменения коэффициента передачи всех трёх усилителей изменяется от 1 до 29=512. Управление коэффициентами усиления микросхем DA3 – DA5 осуществляет микроконтроллер DD1 типа AT90S1200 фирмы Atmel.
Для сжатия динамического диапазона сигнала используется дискретная система автоматической регулировки усиления (АРУ), анализирующая сигнал на выходе последнего усилителя и осуществляющая переключение коэффициента усиления, если уровень этого сигнала выходит за пределы диапазона 1 - 2 вольта.
Напряжение с выхода третьего управляемого усилителя поступает на первый вход компаратора, который встроен в микроконтроллер DD1 (вывод 12). На второй вход этого же компаратора (вывод 13 микроконтроллера DD1) подается напряжение с ЦАП. Напряжение на выходе ЦАП может иметь только два значения, соответствующие верхнему значению (2 вольта), либо нижнему значению диапазона выходного сигнала (1 вольт).
Управление работой ЦАП осуществляет микроконтроллер DD1, который вырабатывает соответствующие сигналы на выводах 14, 15, 16. Сначала на первый (старший) разряд ЦАП (резистор R14) подается напряжение +5В, а на второй разряд (резистор R12) – нулевое напряжение. При этом на втором входе компаратора формируется высокий уровень напряжения (2 вольта), который и сравнивается с напряжением на первом входе.
Если напряжение на первом входе компаратора превышает напряжение на втором входе, то происходит уменьшение коэффициента усиления управляемого усилителя в два раза, После этого процесс повторяется до тех пор, пока напряжение на первом входе компаратора не станет меньше, чем на втором.
Если напряжение на первом входе компаратора меньше напряжения на втором входе, то контроллер DD1 на второй разряд подает напряжение +5В, а на первый разряд – нулевое напряжение. При этом на втором входе компаратора формируется низкий уровень напряжения (1 вольт), который и сравнивается с напряжением на первом входе. Если после этого напряжение на первом входе компаратора меньше напряжения на втором входе, то происходит увеличение коэффициента усиления управляемого усилителя в два раза и процесс повторяется до тех пор, пока напряжение на первом входе компаратора не станет меньше, чем на втором.
Таким образом, в следящем режиме дискретная система АРУ удерживает напряжение на выходе третьего усилителя с управляемым коэффициентом передачи (1-2 вольта) при изменении входного сигнала во всем динамическом диапазоне изменения.
Для исключения циклических переключений на границах диапазона (1 и 2 вольта) предусмотрено введение гистерезиса. Это осуществляется с помощью младших разрядов ЦАП, которые включаются одновременно со старшим путем подачи на них напряжения +5 вольт (резистор R8) . При этом несколько увеличивается опорное напряжение, подаваемое на второй вход компаратора.
Непосредственное управление коэффициентом усиления проводит микроконтроллер DD1, устанавливая соответствующие коды на выводах 2, 3, 6. Эти коды поступают на выводы 15, 16 микросхем DA3 – DA5 и осуществляют изменение коэффициента усиления. Для проведения операции восстановления динамического диапазона (экспандирования) микроконтроллер DD1 7, 8, 9 формирует трехразрядный код коэффициента усиления управляемого усилителя, который поступает на центральный микроконтроллер. Значение коэффициентов передачи устанавливается сигналом с центрального процессора.
Зная максимальные значения коэффициентов передачи этих усилителей, можем оценить, каким должен быть коэффициент передачи предварительного усилителя. Известно, что минимальное значение амплитуды входного сигнала после коммутатора и разделительного конденсатора Uвхmin=5мкВ. При этом амплитуда сигнала подаваемого на АЦП: UАЦП=1В. тогда максимальный коэффициент передачи всего усилительного тракта :
 . (2.3)
. (2.3)
Вычислив, получим КОБЩ=200000. Найдём максимальный коэффициент передачи трёх управляемых усилителей с переменными коэффициентами передачи, который равен
![]() . (2.4)
. (2.4)
где К1 , К2, иК3 - коэффициенты передачи трёх усилителей соответственно. Тогда КПЕР=512. теперь можно найти коэффициент передачи предварительного усилителя![]()
 . (2.5)
. (2.5)
Вычислив, получим Кпу≃391.
Рассмотрим принцип сжатия динамического диапазона сигнала. Рассмотрим ситуацию, когда входной сигнал линейно изменяется от 10мкв до 10 мв Этот случай иллюстрируется рисунком 2.3. При подаче минимального напряжения на вход устройства процессор устанавливает на всех управляемых усилителях максимальные значения коэффициентов передачи. К1=К2=К3=8. На АЦП поступает сигнал с амплитудой приблизительно 1В. При увеличении напряжения входного сигнала увеличивается амплитуда сигнала поступающего на АЦП. Если напряжение входного сигнала превысит значение 20 мкВ, на вход АЦП будет поступать сигнал, амплитуда которого будет превышать 2 В. При этом АЦП выдаст на процессор код, во всех разрядах которого, кроме знакового, будут единицы. В этом случае процессор установит коэффициент передачи последнего управляемого усилителя равным четырём, оставив коэффициенты передачи первых двух на прежнем значении. При дальнейшем увеличении напряжения входного сигнала, процессор понизит коэффициент передачи последнего управляемого усилителя сначала до двух, затем до единицы. При этом важно, чтобы амплитуда сигнала, подаваемого на АЦП не упала ниже значения 1 В, а следовательно погрешность не превысила установленного значения. Это возможно из-за нестабильности входного сигнала и шумов. Поэтому процессор необходимо запрограммировать таким образом, чтобы при уменьшении напряжения на АЦП больше чем на какое-то значение ΔU относительно минимально допустимого, коэффициент передачи управляемого усилителя увеличивался.
При последующем увеличении напряжения входного сигнала процессор установит коэффициент передачи второго управляемого усилителя равным четырём, затем двум, затем единице. Если на вход устройства буден подан сигнал с максимальным в соответствии с техническим заданием напряжением 10 мкВ, коэффициенты передачи трёх управляемых усилителей установятся равными единице.
Перед АЦП необходимо поставить фильтр нижних частот ФНЧ, который бы ограничивал спектр сигнала подаваемого на АЦП пятой гармоникой. Тогда максимальная частота в спектре этого сигнала равна: Fmax=5F=5 кГц. В соответствии с теоремой Котельникова, найдём интервал дискретизации
![]() . (2.6)
. (2.6)
Δt=10-4 c=0.1мс. Требуемый ФНЧ может быть легко реализован на операционном усилителе.
С АЦП оцифрованный сигнал подается на центральный процессор, где осуществляется цифровая обработка. Сначала проводится цифровая узкополосная фильтрация, которая обеспечивает подавление шумов и повышает отношение сигнал-шум. На выходе цифрового фильтра имеем импульсную последовательность, огибающая которой соответствует гармоническому колебанию с частотой равной F=1 кГц. Далее при помощи дискретного преобразования Фурье (ДПФ) находится амплитуда первой гармоники, которая пропорциональна напряжению входного сигнала. Это значение запоминается. После того как с коммутатора поступает последовательность импульсов с амплитудой равной напряжению второго сигнала, и обрабатывается аналогично первому сигналу, выполняется операция деления одного числа на другое. При этом необходимо учитывать, какие коэффициенты передачи были установлены на управляемых усилителях. Результат выполнения операции деления выводится на индикатор. Для этих целей используем однострочный восьми символьный жидкостно-кристаллический индикаторный модуль GBM0801A фирмы XIAMEN.
Похожие работы
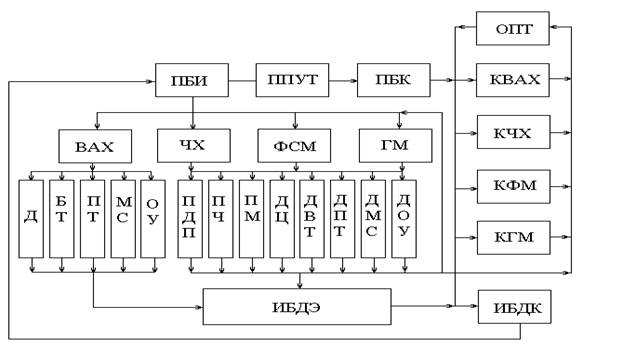
... с полезным сигналом помехам.. Итак, ЦИП наиболее полно удовлетворяют основным требованиям предъявляемым в настоящее время к измерительной аппаратуре, — высокая точность и быстродействие, автоматизация процессов измерения и обработки информации. Обобщенная структурная схема ЦИП показана на рис.25 Рис.25. Обобщенная структурная схема ЦИП В цифровом приборе измеряемая величина х ...
... может быть определена в результате решения матричного уравнения Y = 2(K - Ko ) , (16) где -1 - знак обращения матриц К и Ко. 3.4 Методика измерения двух- и четырехполюсных радиоэлементов Для случая двухполюсника n = 1 (17) имеем i = 1; j = 0. (18) Очевидно, что при условиях (17) - (18) имеем: 1) коэффициенты матриц Ко и К с ...
... , внешнее магнитное поле, частота измеряемого переменного тока. Электромагнитные приборы благодаря простоте, дешевизне и надежности широко применяют для измерения токов и напряжений в сильноточных цепях постоянного и переменного тока промышленной частоты (50 и 400 Гц). Большинство электромагнитных амерметров и вольтметров выпускают в виде щитовых приборов различных класса 1,5 и 2,5. Имеются ...
... (от передвижения источников загрязнения) 1180,48 Всего за год: 211845,25 10. Совершенствование системы электроснабжения подземных потребителей шахты Расчет схемы электроснабжения ЦПП до участка и выбор фазокомпенсирующих устройств Основными задачами эксплуатации современных систем электроснабжения горных предприятий являются правильное определение электриче ...
0 комментариев