Принцип цели ориентирует на то, что при исследовании объекта необходимо прежде всего выявить цель его функционирования
Критерий Лапласа
ОПО КТВК (ГКВВ)
СУЩНОСТЬ И ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ РАСПОЗНАВАНИЯ ОБРАЗОВ
Выбор решающего правила
ЛОГИЧЕСКИЕ МЕТОДЫ
Продукционная модель
Фреймовая модель
СТРУКТУРА И РЕЖИМЫ РАБОТЫ ЭС
Навигация
Выбор решающего правила
Автоматизированные Системы Обработки Информации
115369
знаков
7
таблиц
12
изображений
2. Выбор решающего правила.
Выбор решающего правила определяется формой представления признаковой информации, наличием зависимостей между признаками, требованиями по оперативности распознавания объектов, а также полнотой и достоверностью признаков распознаваемого объекта и эталонного описания.
При разработке систем распознавания выбираются несколько приемлемых решающих правил и оценивают их эффективность путем моделирования работы системы распознавания.
В теории распознавания известно большое количество процедур распознавания:
- вероятностные;
- детерминированные (геометрические);
- логические;
- структурные.
| Метод | Признаки и эталонное описание | Процедуры | Форма представлеления результата |
| Вероятност-ный | Закон распределения; таблицы распознавания | Критерии Байесса, минимакса др. | Вероятностность распознавания |
| Детерминиро-ванный(гео-метрический) | Количественное, качественное; объектно-характерис-тические таблицы | Евклидово расстояние и др. | Мера близости |
| Логический | «1» и «0»; булевы функции | Операции булевой алгебры | Значение результи-рующей булевой функции |
| Структурный | Элементы описания и их конкатенации | Правила грамма-тического разбора | Результаты сопоставления |
В случае параметрических решающих процедур имеется возможность их адаптации к особенностям эталонного описания, обеспечивая таки образом требуемую эффективность распознавания.
3.Разработка алгоритмов управления работой системы распознавания.
Существует несколько вариантов построения систем распознавания:
-без обучения;
-с обучением;
-с самообучением.
Системы без обучения используются тогда, когда есть полная априорная информация о признаках и классах.
Обучающиеся распознающие системы.
Цель обучения состоит в повышении достоверности распознавания объектов в условиях неопределенности, которая является следствием неполной информации об объектах (классах), отсутствие настроенного алгоритма(решающего правила). Поэтому, предметом обучения являются априорная информация (оптимизация размерности признакового описания) и алгоритм распознавания (структурная и параметрическая настройка).
Необходимыми дополнительными элементами такой системы является: алгоритм оптимизации, учитель, база решающих правил.
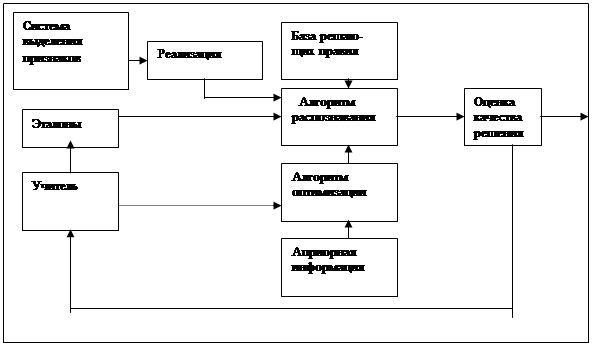
Обучение в общем виде производится в несколько этапов:
-оптимизация априорной информации;
-структурная настройка(выбор решающего правила);
-параметрическая настройка.
Настройка алгоритма распознавания производится под управлением учителя путем предъявления эталонов для распознавания и оценки качества классификации.
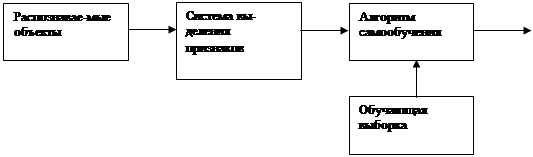
Самообучающиеся системы.
Цель самообучения – формирование обучающей выборки до и в процессе решения задачи распознавания.
Содержанием самообучения является группирование заданной совокупности реализаций в классы на основе заданных правил.
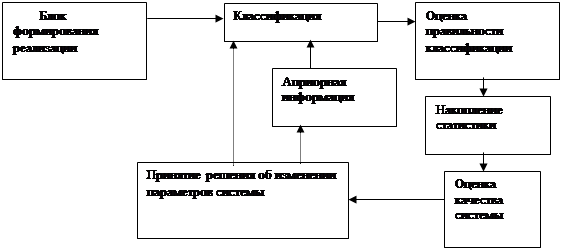
Для выбора оптимального варианта системы строится имитационная модель системы распознавания, основные компоненты которой показаны на рисунке.
МЕТОДЫ РАСПОЗНАВАНИЯ ОБРАЗОВ
1. ГЕОМЕТРИЧЕСКИЕ МЕТОДЫ.
В основе геометрических методов лежит понятие меры близости объектов в n-мерном признаковом пространстве описаний. Центральной задачей при создании систем распознавания является выбор типа меры близости.
Меру близости необходимо выбирать таким образом, чтобы она, с одной стороны, отвечала представлению разработчика о близости объектов рассматриваемых классов, а с другой - позволяла бы упростить процедуры синтеза оптимальных частных алгоритмов.
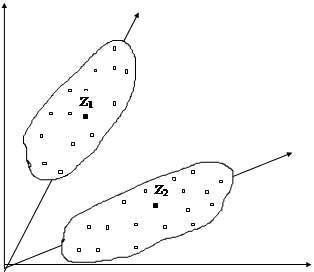
Сущность меры близости применительно к рассматриваемому классу задач покажем на примере двух классов в 2-х мерном пространстве описаний.
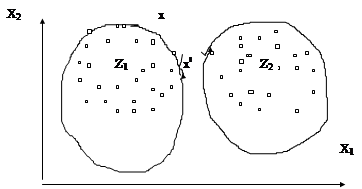
Интерпретация рисунка приводит к естественному выводу о предпочтительности отнесения объекта Х к первому классу. В то же время классификация объекта Хi вызывает затруднения и необходимы расчеты.
Очевидно, что классификация образов с помощью функции расстояния эффективен только в тех случаях, когда классы образов обнаруживают тенденцию к кластеризации (группированию).
Поскольку близость классифицируемого образа к образам класса будет использоваться в качестве критерия для его классификации, назовем такой подход классификацией образов по критерию минимума расстояния.
Классы могут быть представлены путем перечисления членов класса (как на рисунку: точки в кластерах) или с помощью эталонных образов (например, центральными объектами z1 и z2).
Заметим также, что в рассматриваемом классе задач описания объектов являются векторными.
Рассмотрим М классов. Пусть эти классы допускают их представление с помощью эталонных образов Z1,Z2, . . .,Zm. Евклидово расстояние между произвольным вектором образа Х и i-м эталоном определяется следующим выражением:
_____________
Di = || X - Zi || = √(X - Zi)/ (X - Zi) (1)
где || Х || - Евклидова норма;
![]()
![]() х1
х1
х2
Х = х3 - вектор образа распознаваемого объекта;
:
хn
![]()
![]() z1
z1
Z = : - вектор образа эталона класса;
zn
n 1
|| Х || = [Σ Xj2 ]2
j=1
X / = ( x1 ,x2 , . . .,xn) - транспонированный вектор;
X / Z - скалярное произведение;
n
X/ Z = Σ Xj/ Zj
j = 1
Классификатор, построенный по принципу минимума расстояния, вычисляет расстояние, отделяющее классифицируемый образ Х от эталона каждого класса, и зачисляет этот образ в класс,, оказавшийся ближайшим к нему. Другими словами, образ Х приписывается к классу Wi, если условие Di < Djдля всех j ¹ i .
Путем несложных преобразований исходно формуле (1) можно придать более удобный для вычислений вид.
di(X) = X/ Zi- 1/2 Zi/ Zi, i = 1,2,...,M,
где образ Х относится к классу Wi, если условие di (X) > dj (X) справедливо для всех j ¹ i.
Пример:
z1 . . . z5
z1/ = ( 1 2 6 3 1 ) z2/ = ( 6 4 3 2 1 )
x/ = ( 1 3 5 2 1 )
d1(x) = ( 1 3 5 2 1 ) -1/2 ( 1 2 6 3 1 ) = ( 1+6+30+6+1 ) - 1/2 ( 1+4+36+9+1 ) =
= 44 - 1/2 51 = 18.5;
d2(x) = (6+12+15+4+1) - 1/2 (36+16+9+4+1) = 38 - 1/2 66 =5
d1(x) > d2(x) , поэтому образ х принадлежит первому классу.
Меры сходства не исчерпываются расстояниями. В качестве примера можно привести не метрическую функцию сходства
z x/
s(x,z) = -----------,
|| x || || z ||
представляющую собой косинус угла, образованного векторами X и Z. Этой мерой целесообразно пользоваться, когда кластеры располагаются вдоль главных осей или растянуты вдоль лучей, направленных от начала координат.
Однако использование данной меры связано с определенными ограничениями: достаточное отстояние кластеров друг от друга и от начала координат.
Для двоичных признаков (признаки принимают значения либо `` 0`` либо ``1``) может использоваться мера Танимото
z x/
s(x,z) = ------------------- .
x/ x + z/ z - x/ z
Перечисленные меры близости не учитывают корреляционные связи между признаками. Устранить этот недостаток позволяет критерий известный по названием расстояние Махаланобиса, определяемое для образов x и m как
d = ( x - m ) / с -1 ( x - m ),
где c - ковариационная матрица совокупности образов, m - вектор средних значений, а х - представляет образ с переменными характеристиками(классифицируемый образ).
Похожие работы
... , выполнение работ, предоставление услуг). Система предназначена для применения на складах или для лиц, занимающихся реализации продукции. Раздел 1. Описание объекта для разработки и создания автоматизированной системы обработки информации. Проблема учета отгрузки и реализации готовой продукции на предприятии – одна из важнейших проблем на любом предприятии. Система учета отгрузки и реализации ...
... рисунков в формате А0-А1 со скоростью 10-30 мм/с. Фотонаборный аппарат Фотонаборный аппарат можно увидеть только в солидной полиграфической фирме. Он отличается своим высоким разрешением. Для обработки информации фотонаборный аппарат оборудуется процессором растрового изображения RIP, который функционирует как интерпретатор PostScript в растровое изображение. В отличие от лазерного принтера в ...
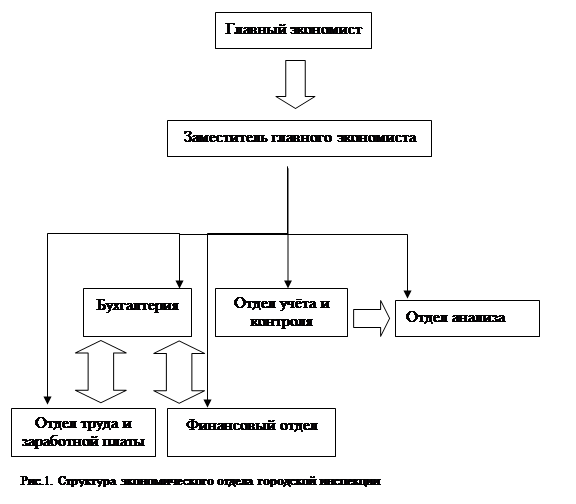
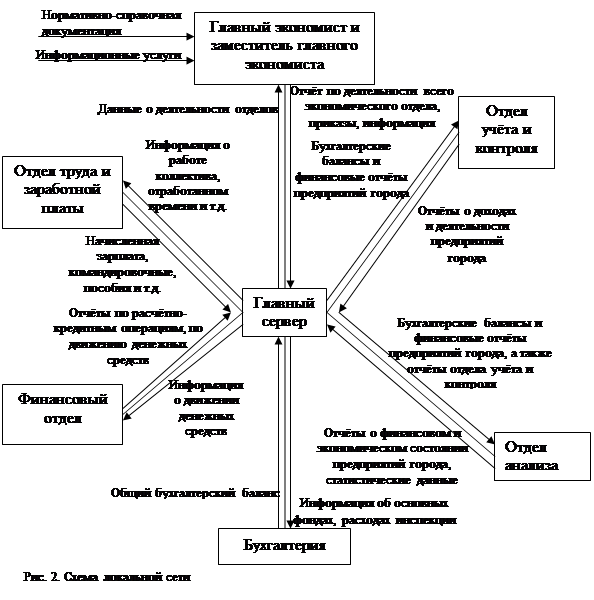

... необходимостью экономить трудовые, материальные и финансовые ресурсы. Отсюда вытекают и специальные требования, предъявляемые автоматизированным системам обработки информации. Прежде всего, система должна отвечать основным функциональным требованиям, в качестве которых выступают операции экономического отдела городской налоговой инспекции. Кроме того, к АСОЭИ предъявляются и основные системные ...
... Конфигурациями Задачами управления Конфигурациями являются контроль изменяющейся ИТ – инфраструктуры (стандартизация, верификация и регистрация), сбор и управления Документацией по Ит – инфраструктуре, а также предоставления информации об ИТ-инфраструктуре для всех других процессов. 14. Управления Изменениями Управление Изменениями направлено на контроль проведения изменений в ИТ- ...
0 комментариев