Навигация
2.4 Призмы.
Для минимального контакта между опорами в балансировочном станке целесообразно использовать призмы.
Различают опорные, грузоприемные и концевые соединительные призмы.
Призмы при помощи которых рычаги опираются на подушки или серьги, называют опорными. [3]
Призмы, воспринимающие нагрузку от платформы или других рычагов, называют грузоприемными.
Наконец, призмы передающие нагрузку, на другой рычаг или на коромысло, носят название концевых, или соединительных.
Призма, несущая в себе гиродержатель, по существу также является грузоприемной, но ее чаще называют концевой призмой коромысла или призмой гиредержателя.
Призмы изготовляют из высокоуглеродистой стали с содержанием углерода ни ниже 0,75 - 0,85 % (марка У - 8); для весов высокой точности применяется агат и ему подобные материалы.
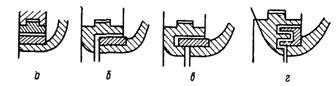
Стальные призмы бывают самых различных профилей, но наиболее распространены четыре профиля: квадратный (рис. 4);
пятиугольный (рис.5);
треугольный (рис. 6);
и грушевидный с углом при вершине 600 (рис.7) .
Призмы заделываются в рычаги либо по всему периметру - закрытые призмы, либо только на одну треть высоты - открытые призмы.
Закрыты призмы по способу крепления делятся [3] на:
консольные - заделанные с одного конца и нагруженные равномерной нагрузкой по всей длине;
двухконсольные - заделанные в середине длины и нагруженные равномерной нагрузкой с обоих концов или сосредоточенной нагрузкой по концам;
двухопорные - заделанные в середине и нагруженные сосредоточенной нагрузкой;
заделанные по концам и нагруженные равномерной нагрузкой по всей средней части;
заделанные вблизи концов и нагруженные двумя сосредоточенными силами.
Закрытые призмы следует рассчитывать на: срезывание, изгиб и контактные напряжения в рабочем ребре призмы.
При расчете на срезывание, напряжение s S определяется по формуле: для консольной призмы
s S = Q / F ; (12)
для всех остальных призм
s S = Q / 2F , (13)
где Q - расчетная нагрузка;
F - площадь сечения призм.
Расчет открытых призм на срезывание и изгиб не ведется, так как эти призмы испытывают только деформацию смятия подошвы и рабочего ребра, в котором возникают контактные напряжения.
Расчет как открытых, так и закрытых призм на контактные напряжения в рабочем ребре ведется на 1 пог. см лезвия (табл.2)
таблица 2
Контактные напряжения в вершинах.
| Тип весов | Наименование призм | Конт. напряжения в кг на 1 пог. см |
| Неравноплечие | Призмы коромысла | 100 |
| передвижные | Призмы рычагов | 400 |
| Автомобильные весы | Призмы коромысла | 100 |
| Призмы рычагов | 900 |
В весах высокой точности призмы закрепляются установочными винтами непосредственно в гнездах (рис.8), или в специальных регулируемых каретках (рис.9).
На рис.9 изображен узел крепления призмы конструкции “Эталон”. Регулируемая каретка 1 крепится на плече коромысла 2 при помощи двух штифтов 3 и винта 4. На верхней части каретки 1 в цилиндрической впадине находится седло 5 с хвостовиком, в который упираются установочные винты 6 и 7.
Винтами 6 устанавливается требуемое положение призмы в горизонтальной плоскости, а при помощи винтов 7 регулируется длина плеча.
Для установки параллельности призм служит планка 8, которая поворачивается вокруг втулки 9 и закрепляется в требуемом положении винтом 10. Эта установка производится при помощи винтов 11, проходящими через выступы 12 планки 8.
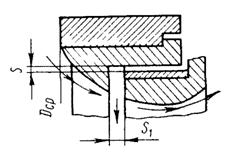
В конструкции “Госметр” узла крепления призм (рис. 10) конец плеча коромысла выполняется с выемкой, на которой устанавливается каретка 1; радиус этой выемки меньше радиуса выпуклости в каретке, вследствие чего каретка опирается на коромысло в четырех точках: двух спереди и двух сзади.
В нижнюю часть каретки ввинчен 2 с проточкой в средней части. В эту проточку упираются своими концами два установочные винта 3, ввинченные в выступы 4 коромысла.
При этом способе крепления обеспечивается надежное соединение каретки с коромыслом и требуемое положение призм в горизонтальной плоскости.
Призма 5 укреплена в каретке четырьмя винтами 6. Эти винты соприкасаются с призмой конической частью своих головок.
Винты 6 служат для установления параллельности призм. Крепление призм при помощи клинового зажима, применяется в весах для больших нагрузок.
Для обеспечения хорошей работы весов необходимо, чтобы призма была твердой и в то же время не была хрупкой.
Это свойство может быть обеспечено только при хорошем качестве стали, из которой изготовляются призмы, и при правильной термической обработке.
Подушки и щечки.
Все призмы опираются, а также воспринимают или передают нагрузку через детали, называемые подушками.
Подушки либо заделываются в стойки или серьги на тугую посадку, либо вкладываются в эти детали (самоустанавливающиеся или качающиеся).
Подушки, которые заделываются на тугую посадку, обычно изготовляются из высокоуглеродистой стали специального профиля.
В настоящее время запрессованные подушки вытесняются самоустанавливающимися подушками почти во всех видах весов.
Это происходит потому, что практически трудно запрессовать подушку так, чтобы призма соприкасалась с ней по всей длине лезвия. Обычно призма соприкасается с подушкой либо с одного, либо с другого конца, что ведет к увеличению контактных напряжений и к выкрашиванию призм.
При самоустанавливающихся подушках призма соприкасается с подушкой по всей длине лезвия и потому случаев выкрашивания бывает значительно меньше.
Самоустанавливающиеся подушки бывают двух типов: штампованные, предохраняемые от выпадения щечками, специальными прокладками и штифтами, проходящими через серьги, и фрезерованные, которые предохраняются от выпадения при помощи штифтов, проходящих через подушку.
Подушки для весов грузоподъемностью до 3 т включительно изготовляют из малоуглеродистой стали с последующей цементацией, а для весов больших нагрузок - из высокоуглеродистой стали.
В весах для небольшой нагрузки размеры подушек выбираются конструктивно, так как всегда обеспечивается большой запас прочности.
У весов с большой предельной нагрузкой следует проверить размеры подушек основных рычагов на скалывание по формуле:
s S = Р / bh < = Rs (14)
где s S - напряжение на скалывание;
Р -- приложенная нагрузка;
b – длина подушки;
h – высота подушки в опасном сечении;
Rs - допускаемое напряжение на скалывание.
Закалка, шлифование и полировка подушек и щечек производится также, как призм, но твердость их должна быть выше, так как, если призмы будут тверже, то они выработают в подушках или щечках углубление, и весы потеряют чувствительность, в связи с возросшим трением.
В этом случае, когда призмы мягче чем подушки или щечки то при работе вершины их постепенно закругляются и, хотя чувствительность весов в этом случае также снижается, но в значительно меньшей степени.
Детали, называемые щечками (рис.11), предохраняют подушку от выпадения и удерживают призму от сдвига с подушек.
В весах с предельной нагрузкой до 3 т – из малоуглеродистой стали, но стальным закаленным вкладышем в месте соприкосновения с острием призмы.
Тензорезисторы.
В настоящее время широкое распространение получают методы и средства тензометрии, позволяющие осуществлять контроль и измерение большого числа параметров [4]. Эти методы и средства используются в большинстве отраслей техники и во многих отраслях науки.
Устройства (приборы, установки, системы и т.п.), позволяющие осуществлять электротензометрирование, т.е. измерение электрическими методами деформаций твердых тел, называются электрическими тензометрами. Электрический тензометр (электротензометрическая установка) состоит из воспринимающего устройства, передающего устройства и индикатора (регистрирующего прибора).
Главной частью воспринимающего устройства является чувствительный элемент, непосредственно воспринимающий измеряемую величину. Измерительная установка благодаря действию всех входящих в неё элементов позволяет зарегистрировать соответствующую неэлектрическую величину (в данном случае -- момент), воспринятую первичным элементом. Конструктивно оформленный чувствительный элемент носит название преобразователя, а в тензометрической аппаратуре соответственно – тензопреобразователя.
В основу работы тензопреобразователей могут быть положены различные принципы, например генераторные или параметрические. Генераторные тензопреобразователи в процессе измерения вырабатывают электродвижущую силу или заряд, а в параметрических преобразователях в процессе измерения происходит изменение параметров электрической цепи, в которую включен тензопреобразователь. Генераторные тензопреобразователи (например, пьезоэлектрические ) не нашли широкого применения в тезометрировании и используются главным образом для качественных исследований.
Параметрические тензопреобразователи получили значительное распространение. К ним относятся емкостные, индуктивные преобразователи и преобразователи сопротивления.
Наиболее широко среди параметрических преобразователей используются тензопреобразователей используются тензопреобразователи сопротивления – тензорезисторы, которые совместно с аппаратурой, предназначены для работы с ними.
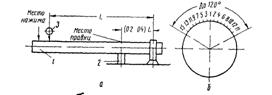
Общий вид прикрепленного к объекту проволочного тензорезистора показан на рис.12. Проволочная решетка, представляющая собой ряд петель 1, укреплена (с помощью клея или лака специального состава) к подложке 3; к концам решетки припаяны (приварены) выводы 4, с помощью которых тензорезистор подключается в измерительную схему. Тензорезистор приклеивается к объекту 2 и становится (благодаря своим малым размерам и ничтожной массе) как бы одним целым, вследствие чего деформации объекта воспринимаются проволочной решеткой, являющейся чувствительным элементом этого преобразователя.
Деформация объекта вызывает деформацию проволочной решетки тензорезистора, в результате которой изменяются геометрические размеры и физические свойства решетки.
Относительное изменение сопротивления тензорезистора определяется формулой:
D R / R = D l / l (1 + 2m ) + D r / r (15)
где R- сопротивление тензорезистора, Ом ;
l - длина проволоки, м ;
r - удельное сопротивление материала проволоки, Ом*м ;
m - коэффициент Пуассона для материала проволоки.
Основными характеристиками тензорезистора являются его активное сопротивление RД , его база L (см. рис.12) и коэффициент тензочувствительности К, в соответствии с формулой (7) равный:
К = (D R / R) / (D l / l) = (1 + 2m ) + (D r / r ) / (D l / l) (16)
Для приготовления проволочных решеток используются материалы, имеющие высокое значение коэффициента тензочувствительности и малое значение температурного коэффициента сопротивления.
Наиболее часто в качестве материала для проволочных тензорезисторов используется константан, элинвар, карм и изоэластик.
Наибольшее распространение в отечественной тензоизмерительной технике получили тензорезисторы из специальной константановой тензометрической проволоки диаметром 0,025 – 0,035 мм, разработанной Научно - исследовательским конструкторским институтом испытательных машин, приборов и средств измерения масс (НИКИМП), институтом “Гипроцветметобработка” и подольским заводом “Микропровод” .
За последние годы значительных успехов достигла техника получения различных полупроводниковых материалов, широко используемых в радиотехнической промышленности, что открыло широкие перспективы в решении проблемы разработки и изготовления полупроводниковых тензорезисторов.
Полупроводниковые тензорезисторы, сохраняя ряд преимуществ, присущих проволочным фольгированным тензорезисторам (ничтожная масса, малые размеры), имеют значительно большую тензочувствительность и высокий уровень выходного сигнала измерительных схем (в ряде случаев это позволяет упростить либо упразднить усилительную аппаратуру). Важнейшей особенностью полупроводниковых тензорезисторов является возможность изменения в широких пределах их механических и электрических свойств, что принципиально неосуществимо в проволочных и фольгированных тензорезисторах. Например, при одних и тех же геометрических размерах сопротивление полупроводникового тензорезистора может лежать в пределах от десятков ом до десятков кОм, а коэффициент тензочувствительности – от 100 до + 200 и выше.
Полупроводниковым тензорезисторам, технологии их изготовления, опыту эксплуатации, конструированию на их базе различного типа преобразователей, перспективам их использования и другим вопросам посвящена обширная периодичная и патентная литература.
Наибольшее распространение у нас в стране и за рубежом получили кремниевые и германиевые тензорезисторы p- и n- типов.
В Новосибирском электротехническом институте (НЭТИ) под руководство проф. А.Ф. Городецкого были разработаны кремниевые тензорезисторы типа “нэтистор” из кремния p- и n- типов с выводами из золота. На базе этих разработок освоены первые промышленные образцы полупроводниковых тензорезисторов.
В настоящее время тензорезисторы применяются не только для измерения линейных деформаций (напряжений), но и других величин: сил, ускорений, давлений, вибраций и др. В этом случае тензорезистор выполняет лишь роль первичного (чувствительного) элемента, а сами преобразователи физических или механических величин, как правило, дополняются упругими элементами. Преобразование измеряемой неэлектрической величины в электрический параметр при последовательном многоступенчатом преобразовании в общем виде описывается сложной функцией:
y = f1 (e ) = f1 [f2 (x)], (17)
где у - электрический параметр (сопротивление тензорезистора);
х - измеряемая неэлектрическая величина;
e - линейная деформация вспомогательного упругого элемента.
Законы преобразования линейной деформации в изменение сопротивления тензорезисторов [e = f2 (х)] изучены . Менее изучены свойства и характеристики упругих элементов, осуществляющих первичное преобразование физических величин в линейную деформацию, воспринимаемую далее проволочными, фольговыми или полупроводниковыми тензорезисторами. Вид упругого элемента преобразователя: балка, мембрана, пружина различной жесткости и др. – определяет назначение преобразователя в целом, а деформируясь и частотные свойства упругого элемента – чувствительность преобразователя и применимость его для исследования динамических процессов.
При подборе или конструировании преобразователей для измерения физических или механических величин необходимо удовлетворять двум требованиям:
а) получать наибольшую, достаточную для работы тензометрической аппаратуры чувствительность;
б) обеспечить высокую собственную частоту упругих элементов, исключающую появление частотных погрешностей.
Эти требования выполняются противоречивыми конструктивными мерами, и увеличение чувствительности большинства упругих элементов пропорционально уменьшает их собственную частоту.
Обычно в зависимости от задач измерения выбирается преобразователь (разрешающая способность) которого вполне достаточна для измерения и регистрации исследуемого процесса с погрешностью, не превышающей заданной. Это условие, например, при использовании тензорезисторов записывается следующим образом :
e ср. > e min доп, (18)
где e ср. – деформация, воспринимаемая размещенным на упругом элементе тензорезистором и средняя его длине (базе);
e min доп, - минимальная деформация, достаточная для регистрации данным тензоизмерительным трактом с погрешностью не выше допустимой
Искомая деформация e ср. для некоторых типовых упругих элементов – балок и мембран – может быть определена на основе зависимостей, проводимых в соответствующих курсах или справочниках.
Отсутствие частотных погрешностей определяется решением дифференциального уравнения вынужденных колебаний упругих элементов
Анализ уравнений движения, показывает, что коэффициент динамичности несущественно отличается от единицы (с ошибкой менее 1%) при выполнении следующего неравенства:
w 0 > (8 ¸ 10) w (19)
где w 0 – собственная частота упругой системы;
w -- частота исследуемого процесса (высшая учитываемая гармоническая составляющая).
Для упругих систем, отличающихся значительным затуханием (наличием трения, демпфирование, материал с большим внутренним трением), превышение собственной частоты над частотой исследуемого процесса может быть уменьшено до 3 – 4. В этом случае удается практически исключить инерционные погрешности и при собственной частоте упругого элемента расширить частотные пределы измерений.
Как отмечено было выше, широкое применение получили измерения разнообразных физических величин с помощью преобразователей, использующих тензорезисторы в качестве первичных (чувствительных) элементов. И если совсем недавно измерения с помощью тензорезисторов сопротивления считались достаточно грубыми, то с настоящее время электротензометрирование используется и при точных измерениях, вплоть до прецизионных. Так например, тензометрические преобразователи применяются при весо- и силоизмерениях.
При весоизмерениях используются как наклеиваемые тензорезисторы, так и тензорезисторы с проволокой на свободных подвесах.
В НИКИМП разработан ряд тензопреобразователей с нагрузками от 100 кгс до 1000 тс, использующих специальные типы наклеиваемых тензорезисторов, в Институте автоматики – силоизмерительные тензопреобразователи с номинальными усилиями от 1 до 250 тс, использующие бесклеевые тензорезисторы. За рубежом сило- и весоизмерительные тензопреобразователи выпускаются фирмами “Hotinger”, “Philips”, “Simens” и др.
Серийный выпуск электротензометрических весов, сило- и весоизмерительных тензопреобразователей налажен на Киевском заводе порционных автоматов им. Ф.Э. Дзержинского (силоизмерительные бесклеевые тензопреобразователи типов ДСТБ-С, ДСТВ-С и др.) на Одесском заводе им. Старостина (тензометрические весы: крановые, бункерные и т.п., разработанные в ОПИ под руководством А.С. Радчика) и на Краснодарском заводе тензометрических приборов (силоизмерительные тензопреобразователи типа ТДС с чувствительным элементом в виде наклеенных полупроводниковых тензорезисторов)
Фирма “Simens” выпускает тензометрические силоизмерители высокой точности с упругими элементами в виде двух параллельных балок, используемые в торговых весах (предельные нагрузки от 13 до 600 кгс).
В статье [5] приводится описание силоизмерительного тензопреобразователя из монокристалла кремния, в котором используется интегральная микросхема. Также рассмотрен силоизмерительный преобразователь с чувствительным элементом из стеклоткани, на которую наклеены проволочные тензорезисторы. Эти преобразователи применяются для измерения малых нагрузок.
Современные сило- и весоизмерительные тензопреобразователи позволяют выполнять измерения с погрешностью, не превышающие 0,5%. Имеются сведения о тензопреобразователях, позволяющих выполнять и более точные измерения (с погрешностью 0,1 – 0,2%).
Для измерения давлений широко используются тензопреобразователи с проволочными, фольговыми и полупроводниковыми тензорезисторами, причем благодаря высокому верхнему частотному пределу полупроводниковые тензорезисторы в последнее время стали все чаще применяться в преобразователях для измерения давлений (в первую очередь динамических давлений).
Для измерения давлений используются в основном два вида упругих преобразователей: мембраны и цилиндрические оболочки . Некоторое применение для измерения статических давлений находят преобразователи, построенные на базе обычного манометра с трубкой Бурдона.
Мембранные преобразователи давлений в качестве упругого элемента имеют мембрану – тонкую пластинку, нагруженную с одной стороны измеряемым давлением р . Упругая пластинка закрепляется по контуру, и на поверхности, противоположной той, на которую действует давление, располагается тензочувствительный элемент. Обычно применяются круглые пластинки, причем их жесткость и геометрические размеры выбираются такими, что влиянием цепных напряжений можно пренебречь.
Если из-за больших нагрузок или недостаточной жесткости мембрана получает большие прогибы, то на изгибные напряжения накладывают цепные напряжения и линейность зависимости между давлением р и относительной деформацией e Д на поверхности нарушается.
Большое влияние на качество работы мембранного преобразователя давлений, линейность его функции преобразования и чувствительность оказывает степень заделки мембраны по контуру. Обычно следует стремиться к жесткой заделке, ибо при этом создаются оптимальные условия расположения на мембране тензочувствительного элемента и обеспечивается более высокая собственная частота самой мембраны.
Тензочувствительные элементы могут быть выполнены в виде проволочных, фольговых или полупроводниковых тензорезисторов.
Расчет чувствительности мембранного преобразователя давления производится в следующем порядке:
а) определяются изгибающие моменты в тангенциальном и радиальных сечениях;
б) находятся деформации по направлению радиуса по нормали к радиусу;
в) определяются средние интегральные деформации тензочувствительных элементов при действии расчетного давления.
Для жестко заделанной по контуру мембраны изгибающие моменты в радиальном и тангенциальном сечениях будут:
Мr = p/16 [R2 (1+m ) - r2 (3+m )]; ü (20)
Mt = p/16 [R2 (1+m ) - r2 (3+3m )]; þ
где р – распределенное давление на мембрану;
m --коэффициент Пуассона для материала мембраны;
R – радиус мембраны;
r – радиус точки мембраны, для которой вычисляются Мr и Mt.
Соответствующие напряжения s r и s t и деформации e r и e t на поверхности мембраны в точке с радиусом r находятся из зависимостей:
s r = 6Mr / t2 = 3p / 8t2 [R2 (1+m ) - r2 (3+m )]; ü (21)
s r = 6Mr / t2 = 3p / 8t2 [R2 (1+m ) - r2 (3+3m )]; þ
e r = 1 / E (s r - m s t); (22)
e t = 1 / E (s n - m s t), (23)
где Е – модуль нормальной упругости для материала мембраны;
t – толщина мембраны.
ONT FACE="Times New Roman">Подставляя в последние уравнения значения s r и s t , окончательно можно записать:
e r = (3p / 8t2) (1 - m 2 / E) (R2 - 3r2); ü (24)
e t = (3p / 8t2) (1 - m 2 / E) (R2 - r2). þ
Для мембраны, свободно опертой по контуру, деформации в точке с радиусом r можно найти по формулам:
e r = (3p / 8Et2) [R2 (3 - 2m 2) - r2 (3 - 3m 2)] ü (25)
e t = (3p / 8Et2) [R2 (3 - 2m 2) - r2 (1 - m 2)] þ
Дальнейшее решение сводится к определению абсолютной D lд и относительной (средней) e ср = D lд / lд деформации участка мембраны на длине тензочувствительного элемента lд . Исходными данными для этого решения являются приведенные выше зависимости для e r и e t и геометрическая форма решетки.
Для центрального профиля:
D lд = 2 r0ò 0 e r dr = (3p / 4Et2 ) [r0 (1- m 2) (r02 - R2) / Е ] ü (26)
e ср = (D lд / lд )= (3p / 8Et2 ) [ (1- m 2) / Е (R2 - r02)] þ
Собственная частота в герцах (основной тон) жестко заделанной мембраны определяется по зависимости, полученной Ю.А. Шиманским:
f0 = 1,57 Ö Eh3 / 12R4 m0 (1 - h 2) (27)
где через m0 обозначена масса единицы площади мембраны.
Собственная частота мембраны, свободно опертой по кромкам,
f0 = 0,94 Ö Eh3 / 12R4 m0 (1 - h 2) (28)
В некоторых случаях и кинематическую схему преобразователя давления вводится еще один упругий элемент, например вторая мембрана или консольная балка, на котором располагается тензочувствительный элемент.
Подобное конструктивное решение является рациональным при быстропеременных нагревах мембраны, когда не удается обеспечить хорошую термокомпенсацию при расположении рабочего и компенсационного тензорезисторов на самой мембране.
Для определения чувствительности такого преобразователя находится сила F , передаваемая от наружной мембраны к внутреннему упругому элементу. Эта сила может быть найдена из условия равенства прогибов мембраны и дополнительного упругого элемента.
Если в качестве дополнительного упругого элемента используется также мембрана, то выражение для деформаций в радиальном и тангенциальном сечениях этой мембраны в точке с радиусом r имеют вид:
e r = (3F / 2p t2 ) [(1-m 2) (ln R/r - 1) / E ] ü (29)
e r = (3F / 2p t2 ) [(1-m 2) (ln R/r) / E ] þ
Если в качестве дополнительного упругого элемента используется призматическая консольная балка, то средняя деформация тензоэлемента, расположенного вдоль балки будет :
e ср. = 6F (l - xД ) / E bh2 (30)
где l, d, h – длина, ширина и толщина балки;
хД – расстояние от середины тензоэлемента до заделки, обычно равное половины базы тензорезистора.
Приведенные выше зависимости для чувствительности и собственные частоты упругих элементов иллюстрируют общее очень важное в практическом применении правило : наибольшей чувствительности преобразователя независимо от его типа при сохранении достаточно высокой собственной частоты можно достигнуть выбором материала с низким модулем упругости. Для любых упругих элементов при заданных нагрузках деформация на поверхности в месте установки тензорезистора обратно пропорциональна модулю нормальной упругости. Что касается собственной частоты, то при неизменных геометрических размерах упругого элемента она падает, но пропорционально отношению модулей упругости в степени 1 / 2 . Это уменьшение частоты легко компенсируется изменением геометрических размеров упругого элемента (например, увеличением толщины). В целом при заданной собственной частоте преобразователя его чувствительность при использовании материалов с низким модулем упругости возрастает.
В качестве основного чувствительного элемента возможно использование серийных тензопреобразователей. Преобразователь состоит из измерительного блока и электронного устройства. Преобразователи различных параметров имеют унифицированное электронное устройство и отличаются лишь конструкцией измерительного блока.
Измеряемый параметр подается в камеру измерительного блока и линейно преобразуется в деформацию чувствительного элемента и изменение электрического сопротивления тензорезисторов тензопреобразователя, размещенного в измерительном блоке.
Электронное устройство преобразователя преобразует это изменение сопротивления в токовый выходной сигнал.
Чувствительным элементом тензопреобразователя является пластина из монокристаллического сапфира с кремниевыми пленочными тензорезисторами (структура КНС), прочно соединенная с металлической мембраной тензопреобразователя.
Схема преобразователя Сапфир 22ДА представлена на рис.14.
Тензопреобразователь 4 мембранно-рычажного типа размещен внутри основания 9 и отделен от измеряемой среды металлической гофрированной мембраной 8.
Мембраны 8 и 14 по наружному контуру приварены к основанию 9 и соединены между собой центральным штоком 6, который связан с концом рычага тензопреобразователя 5 с помощью тяги 13. Измеряемое давление подается в камеру 7; полость 12 вакуумирована и герметизирована.
Фланец 10 уплотнен с помощью прокладки 3.
Воздействие измеряемого давления вызывает прогиб мембраны 8, изгиб мембраны тензопреобразователя 4 и изменение сопротивления тензорезисторов. Электрический сигнал от тензопреобразователя передается из измерительного блока в электронное устройство 1 по проводам через гермовывод 2.
3.ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ.
Похожие работы
... -автомат с тепловым реле шт. 3 50,00 150,00 итого: 1450,00 Суммарные затраты 1769,58 При эксплуатации установки потребляется 5 кВтЧч электроэнергии, что составит 98 рублей. Установка для статической балансировки является исключительно лабораторным стендом и использоваться в качестве промышленной установки не может. Норма расходов на содержание ...
... может быть снято и термообработкой. Процесс ремонта повреждения посадочных поверхностей металлизацией аналогичен описанному выше способу ремонта электронаплавкой металла. Искривление и поломка валов чаще всего происходят у реверсивных машин и электродвигателей с короткозамкнутым ротором. Это объясняется большими нагрузками, воспринимаемыми валом « момент резкого изменения направления вращения ...
... и необходимый объем восстановительных работ. На основании ведомости дефектов составляют спецификацию необходимых для капитального ремонта материалов и смету стоимости ремонтных работ. 2. Ремонт и монтаж центробежных насосов 2.1 Виды ремонтов Плановый осмотр (ревизию) проводят через каждые 200—250 ч работы агрегата. Объем работ, выполняемых при этом, зависит от типа насосов. Обычно при ...
... Рабочие колеса не должны иметь износа лопаток и дисков от коррозии и эрозии более 25% от их номинальной толщины. Изгиб лопаток не допускается. 4.2.2 Ведомость дефектов на ремонт центробежного насоса Таблица 4.3 - Ведомость дефектов на ремонт насоса Наименование узлов и деталей подлежащих ремонту Характер неисправности Метод устранения Необходимые материалы Наименование Кол-во Ед. ...
0 комментариев