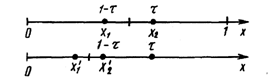
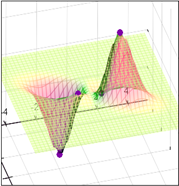
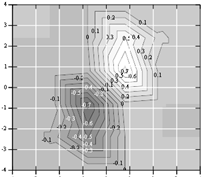
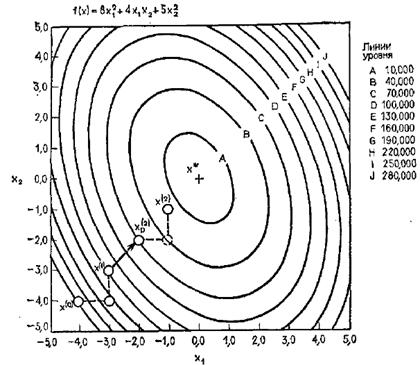
На разработку методов прямого поиска для определения минимума функций и переменных было затрачено много усилий . Методы прямого поиска являются методами, в которых используются только значения функции. Мы рассмотрим подробно лишь один из них. Практика показала, что этот метод эффективен и применим для широкого числа приложений. Рассмотрим функцию двух переменных. Ее линии постоянного уровня1 на рис. 1,
а минимум лежит в точке (x1*,x2*). Простейшим методом поиска является метод покоординатного спуска. Из точки А мы производим поиск минимума вдоль направления оси и , таким образом, находим точку В, в которой касательная к линии постоянного уровня параллельна оси . Затем, производя поиск из точки В в направлении оси , получаем точку С, производя поиск параллельно оси , получаем точку D, и т. д. Таким образом, мы приходим к оптимальной точке. Очевидным образом эту идую можно применить для функций n-переменных.
Теоретически данный метод эффективен в случае единственного минимума функции. Но на практике он оказывается слишком медленным. Поэтому были разработаны более сложные методы, использующие больше информации на основании уже полученных значений функции.
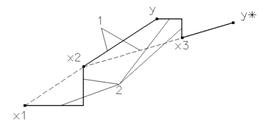
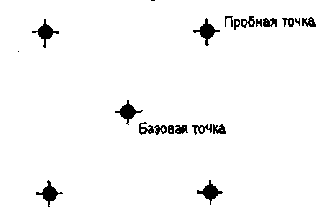
Метод Хука-ДживсаМетод Хука-Дживса был разработан в 1961 году, но до сих пор является весьма эффективным и оригинальным. Поиск состоит из последовательности шагов исследующего поиска вокруг базисной точки , за которой в случае успеха следует поиск по образцу. Он применяется для решения задачи минимизирования функции без учета ограничений .
Описание этой процедуры представлено ниже:
А. Выбрать начальную базисную точку b1 и шаг длиной h1 для каждой переменной xj, j = 1, 2,…, n. В приведенной ниже программе для каждой переменной используется шаг h, однако указанная выше модификация тоже может оказаться полезной.
Б. Вычислить f (х) в базисной точке b1 с целью получения сведений о локальном поведении функции f (x). Эти сведения будут использоваться для нахождения подходящего направления поиска по образцу, с помощью которого можно надеяться достичь большего убывания значения функции. Функция f(x) в базисной точке b1, находится следующим образом:
1. Вычисляется значение функции f (b1) в базисной точке b1.
2. Каждая переменная по очереди изменяется прибавлением длины шага. Таким образом, мы вычисляем значение функции f (b1+h1e1), где e1 – единичный вектор в направлении оси x1. Если это приводит к уменьшению значения функции, то b1 заменяется на b1+h1e1. В противном случае вычисляется значение функции f (b1-h1e1), и если ее значение уменьшилось, то b1 заменяем на b1-h1e1. Если ни один из проделанных шагов не приводит к уменьшению значения функции, то точка b1 остается неизменной и рассматриваются изменения в направлении оси х2, т. е. находится значение функции f (b1+h2e2) и т. д. Когда будут рассмотрены все n переменные, мы будем иметь новую базисную точку b2.
3. Если b2=b1, т. е. уменьшение функции не было достигнуто, то исследование повторяется вокруг той же базисной точки b1, но с уменьшенной длиной шага. На практике удовлетворительным является уменьшение шага (шагов) в десять раз от начальной длины.
4. Если b2![]() b1, то производится поиск по образцу.
b1, то производится поиск по образцу.
В. При поиске по образцу используется информация, полученная в процессе исследования, и минимизация функции завершается поиском в направлении, заданном образцом. Эта процедура производится следующим образом:
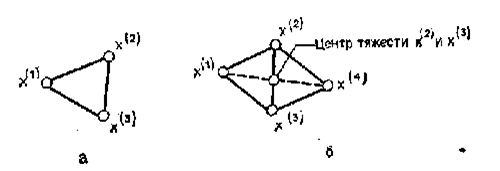
1. Разумно двигаться из базисной точки b2 в направлении b2-b1, поскольку поиск в этом направлении уже привел к уменьшению значения функции. Поэтому вычислим функцию в точке образцаP1=b1+2(b2-b1) .
В общем случае
Pi=bi+2(bi+1-bi) .
2. Затем исследование следует продолжать вокруг точки Р1 (Рi) .
3. Если наименьшее значение на шаге В, 2 меньше значения в базисной точке b2 (в общем случае bi+1), то получают новую базисную точку b3 (bi+2), после чего следует повторить шаг В, 1. В противном случае не производить поиск по образцу из точки b2 (bi+1), а продолжить исследования в точке b2 (bi+1).
Г. Завершить этот процесс, когда длина шага (длины шагов) будет уменьшена до заданного малого значения.
Модифицированный метод Хука-ДживсаЭтот метод нетрудно модифицировать и для учета ограничений .Было выдвинуто предложение , что для этого будет вполне достаточно при решении задачи минимизации присвоить целевой функции очень большое значение там,где ограничения нарушаются .К тому же такую идею просто реализовать с помощью програмирования .
Нужно проверить ,каждая ли точка ,полученная в процессе поиска , принадлежит области ограничений .Если каждая , то целевая функция вычисляется обычным путем . Если нет , то целевой функции присваивается очень большое значение . Таким образом , поиск будет осуществляться снова в допустимой области в направлении к минимальной точке внутри этой области.
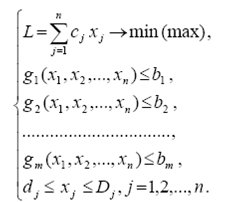
В тексте прогаммы модифицированного метода прямого поиска Хука-Дживса сделана попытка реализовать такую процедуру. Рассматриваемая задача формулируется следующим образом :
минимизировать f (x1,x2) = 3x12+4x1x2+5x22 ,
при ограничениях x1![]() x2
x2![]() x1+x2
x1+x2![]() .
.
Текст программы
program HuDjMody;
(*** Модифицированный метод Хука-Дживса ***)
(*** (при наличии ограничений) ***)
uses crt;
label 0,1,2,3,4,5,6,7;
var k,h,z,ps,bs,fb,fi :real;
i,j,n,fe :integer;
x,y,b,p :array[1..10] of real;
(*** Процедура,вычисляющая функцию ***)
procedure calculate;
begin
z:=3*sqr(x[1])+(4*x[1]*x[2])+(5*sqr(x[2]));
if (x[1]<0) or (x[2]<0) or ((x[1]+x[2])<4) then
z:=1.7e+38;
fe:=fe+1; (*** Счетчик ***)
end;
begin
clrscr;
gotoxy(20,2);
writeln('Модифицированный метод Хука-Дживса');
gotoxy(23,3);
writeln('( при наличии ограничений )');
writeln;
writeln('Введите число переменных:');
readln(n);
writeln;
writeln('Введите начальную точку x1,x2,…,xN');
for i:=1 to n do
readln(x[i]);
writeln;
writeln('Введите длину шага');
readln(h);
writeln;
k:=h;
fe:=0;
for i:=1 to n do
begin
y[i]:=x[i];
p[i]:=x[i];
b[i]:=x[i];
end;
calculate;
fi:=z;
writeln('Начальное значение функции', z:2:3);
for i:=1 to n do
writeln(x[i]:2:3);
ps:=0;
bs:=1;
(*** Исследование вокруг базисной точки ***)
j:=1;
fb:=fi;
0: x[j]:=y[j]+k;
calculate;
if z<fi then goto 1;
x[j]:=y[j]-k;
calculate;
if z<fi then goto 1;
x[j]:=y[j];
goto 2;
1: y[j]:=x[j];
2: calculate;
fi:=z;
writeln('Пробный шаг',' ', z:2:3);
for i:=1 to n do
writeln(x[i]:2:3);
if j=n then goto 3;
j:=j+1;
goto 0;
3: if fi<fb-1e-08 then goto 6;
(*** После оператора 3,если функция не уменьшилась, ***)
(*** произвести поиск по образцу ***)
if (ps=1) and (bs=0) then
goto 4;
(*** Но если исследование производилось вокруг точки ***)
(*** шаблона PT,и уменьшение функции не было достигнуто,***)
(*** то изменить базисную точку в операторе 4: ***)
(*** в противном случае уменьшить длину шага в операторе***)
(*** 5: ***)
goto 5;
4: for i:=1 to n do
begin
p[i]:=b[i];
y[i]:=b[i];
x[i]:=b[i];
end;
calculate;
bs:=1;
ps:=0;
fi:=z;
fb:=z;
writeln('Замена базисной точки',' ',z:2:3);
for i:=1 to n do
writeln(x[i]:1:3);
(*** (следует за последним комментарием) ***)
(*** и провести исследование вокруг новой базисной точки ***)
j:=1;
goto 0;
5: k:=k/10;
writeln('Уменьшить длину шага');
if k<1e-08 then goto 7;
(*** Если поиск незакончен,то произвести новое ***)
(*** исследование вокруг новой базисной точки ***)
j:=1;
goto 0;
(*** Поиск по образцу ***)
6: for i:=1 to n do
begin
p[i]:=2*y[i]-b[i];
b[i]:=y[i];
x[i]:=p[i];
y[i]:=x[i];
end;
calculate;
fb:=fi;
ps:=1;
bs:=0;
fi:=z;
writeln('Поиск по образцу',' ',z:2:3);
for i:=1 to n do
writeln(x[i]:2:3);
(*** После этого произвести исследование вокруг ***)
(*** последней точки образца ***)
j:=1;
goto 0;
7: writeln('Минимум найден');
for i:=1 to n do
writeln('x(',i,')=',p[i]:2:3);
writeln;
writeln('Минимум функции равен',' ',fb:2:3);
writeln('Количество вычислений функции равно',' ',fe);
repeat until keypressed;
end.
Приведенная выше программа реализует описанную процедуру. Одной или двух точек бывает недостаточно для определения начальной точки. Первая точка всегда должна выбираться осмотрительно. ЭВМ работает только с ограниченной точностью, и ошибки могут накапливаться в процессе сложных вычислений, особенно если шаг имеет “неудобную” длину. (Обычно мы будем избегать “неудобной” длины, но программа должна быть работоспособна и в таких ситуациях.) Поэтому в строке , где выясняется вопрос об изменении базисной точки, мы избегаем уменьшения длины шага из-за накапливания ошибки введением длины шага, равной ![]() . Мы отслеживаем, где производится исследование – в базисной точке (В5 = 1, Р5 = 0) или в точке образца (В5 = 0, Р5 = 1). Как можно убедиться на практике, если не принимаются такие меры предосторожности даже программа с удовлетворительной логикой будет неработоспособна.
. Мы отслеживаем, где производится исследование – в базисной точке (В5 = 1, Р5 = 0) или в точке образца (В5 = 0, Р5 = 1). Как можно убедиться на практике, если не принимаются такие меры предосторожности даже программа с удовлетворительной логикой будет неработоспособна.
В приведенной программе минимальная длина шага равна ![]() , но она может быть изменена . Для контроля за выполнением процедуры в программу введена печать промежуточных результатов. Для увеличения скорости счета могут быть удалены строки вывода подсказок и пояснений.
, но она может быть изменена . Для контроля за выполнением процедуры в программу введена печать промежуточных результатов. Для увеличения скорости счета могут быть удалены строки вывода подсказок и пояснений.
Процедура calculate вычисляет значение минимизируемой функции ,в нашем случае : f (x1,x2) = 3x12+4x1x2+5x22 ,
при ограничениях x1![]() x2
x2![]() x1+x2
x1+x2![]() .
.
Минимум, равный 44, достигается в точке (3;1) при ограничении x1+x2=4.
Для начальной точки (4;3) и при длине шага , равной единице , программой успешно решена задача минимизации .
Ниже приведена распечатка результата работы программы :
Модифицированный метод Хука-Дживса
(при наличииограничений)
Введите число переменных
2
Введите начальную точку х1,х2,…,хN
4
3
Введите длину шага
1
Начальное значение функции 141.000
4.000
3.000
Пробный шаг 108.000
3.000
3.000
Пробный шаг 71.000
3.000
2.000
Поиск по образцу 1.70000000000001566Е+0038
2.000
1.000
Пробный шаг 44.000
3.000
1.000
Пробный шаг 44.000
3.000
1.000
Поиск по образцу 1.70000000000001566Е+0038
3.000
0.000
Пробный шаг 48.000
4.000
0.000
Пробный шаг 48.000
4.000
0.000
Замена базисной точки 44.000
3.000
1.000
Пробный шаг 44.000
3.000
1.000
Пробный шаг 44.000
3.000
1.000
Уменьшить длину шага
Пробный шаг 44.000
3.000
1.000
Пробный шаг 44.000
3.000
1.000
Уменьшить длину шага
Пробный шаг 44.000
3.000
1.000
Пробный шаг 44.000
3.000
1.000
Уменьшить длину шага
Пробный шаг 44.000
3.000
1.000
Пробный шаг 44.000
3.000
1.000
Уменьшить длину шага
Пробный шаг 44.000
3.000
1.000
Пробный шаг 44.000
3.000
1.000
Уменьшить длину шага
Пробный шаг 44.000
3.000
1.000
Пробный шаг 44.000
3.000
1.000
Уменьшить длину шага
Пробный шаг 44.000
3.000
1.000
Пробный шаг 44.000
3.000
1.000
Уменьшить длину шага
Пробный шаг 44.000
3.000
1.000
Пробный шаг 44.000
3.000
1.000
Уменьшить длину шага
Минимум найден
х(1) = 3.000
х(2) = 1.000
Минимум функции равен 44.000
Количество вычислений равно 74
Для начальной точки (3;4) и длины шага , равной единице , программой также успешно решена задача минимизации .
Для начальной точки (5;6) и длины шага , равной единице , задача не решена , т.к. программа остановилась в точке (1;3) , т.е. на активном ограничении , и выдала неверный результат .
Распечатка результата работы программы приведена ниже :
Модифицированный метод Хука-Дживса
(при наличииограничений)
Введите число переменных
2
Введите начальную точку х1,х2,…,хN
5
6
Введите длину шага
1
Начальное значение функции 375.000
5.000
6.000
Пробный шаг 324.000
4.000
6.000
Пробный шаг 253.000
4.000
5.000
Поиск по образцу 155.000
3.000
4.000
Пробный шаг 124.000
2.000
4.000
Пробный шаг 81.000
2.000
3.000
Поиск по образцу 1.70000000000001566Е+0038
0.000
1.000
Пробный шаг 1.70000000000001566Е+0038
0.000
1.000
Пробный шаг 1.70000000000001566Е+0038
0.000
1.000
Замена базисной точки 81.000
2.000
3.000
Пробный шаг 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Поиск по образцу 1.70000000000001566Е+0038
0.000
3.000
Пробный шаг 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Замена базисной точки 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Уменьшить длину шага
Пробный шаг 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Уменьшить длину шага
Пробный шаг 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Уменьшить длину шага
Пробный шаг 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Уменьшить длину шага
Пробный шаг 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Уменьшить длину шага
Пробный шаг 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Уменьшить длину шага
Пробный шаг 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Уменьшить длину шага
Пробный шаг 60.000
1.000
3.000
Пробный шаг 60.000
1.000
3.000
Уменьшить длину шага
Минимум найден
х(1) = 1.000
х(2) = 3.000
Минимум функции равен 60.000
Количество вычислений равно 89
Аналогичные неутешительные результаты были получены для начальной точки (5;6) и длины шага , равной 0.5 .Неверное решение было найдено в точке (1.5;2.5) . Для начальной точки (4;3) и длины шага , равной 0.5 ,программа работала нормально , но было получено неверное решение в точке (2.5;1.5) .
Проблема понятна . С помощью данного метода невозможно двигаться вдоль границы области ограничений и сходимость достигается в первой же точке границы , где и находится решение . Общая задача оптимизации при наличии ограничений очень сложна и для получения практического метода решения требуются более изощренные процедуры , чем приведенная выше .
Литература: Б.Банди “Методы оптимизации” Р.Хук , Т.А.Дживс “ Прямой поиск решения для числовых и статических проблем ”, 212-219 с., 1961 .Похожие работы
... Метод преобразования целевой функции, метод штрафных функций, табличный симплекс – метод. Список используемой литературы 1. А.Г.Трифонов. Постановка задачи оптимизации и численные методы ее решения; 2. Б. Банди. Методы оптимизации. Вводный курс., 1988; 3. Мендикенов К.К. Лекции Приложение А using System; using System.Collections.Generic; using System.ComponentModel; using System. ...
... , Флетчера-Ривса). Методы второго порядка, использующие, кроме того, и информацию о вторых производных функции f (x) (метод Ньютона и его модификации). Метод конфигураций (Хука - Дживса) Следует выделить два этапа метода конфигураций: 1) исследование с циклическим изменением переменных и 2) ускорение поиска по образцам. Исследующий поиск начинается в точке х0, называемой старым базисом. ...
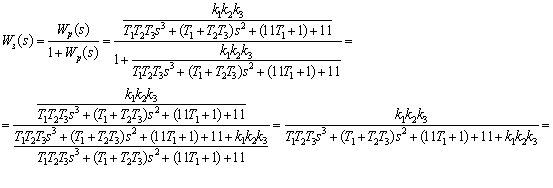
... ____________________________ подпись " ______ " ________________ 2007 г. Студент ____________________________ Подпись " ____ " _________________ 2007 г. Содержание 1. Постановка задачи АНАЛИЗ Численные методы интегрирования (Исследование устойчивости САУ) Для заданной системы требуется определить: Передаточную функцию замкнутой системы, для случая ; Корни характеристического ...
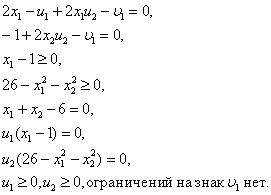
... нахождение точки Куна—Таккера обеспечивает получение оптимального решения задачи нелинейного программирования. Теорему 2 можно также использовать для доказательства оптимальности данного решения задачи нелинейного программирования. В качестве иллюстрации опять рассмотрим пример: Минимизировать при ограничениях С помощью теоремы 2 докажем, что решение является оптимальным. Имеем Так ...
0 комментариев