Навигация
Вычисление настроек регуляторов и исследование статических свойств системы регулирования
19599
знаков
8
таблиц
3
изображения
3 Вычисление настроек регуляторов и исследование статических свойств системы регулирования
Автоматическое устройство, обеспечивающее поддержание выходных величин объекта вблизи требуемых значений, называют автоматическим регулятором.
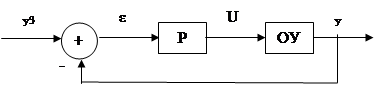
Регулятор реализует закон регулирования. Структурная схема системы регулирования представлена на рисунке 2.
 |
| |||
Рисунок 2 – Структурная схема системы регулирования
Целью регулирования является выполнение условия ε = y3 – y = 0
Основные законы регулирования:
1) релейный (р- закон)
0, если ε ≤0
U = 1, если ε>0
![]() где 1 – включено, 0 – выключено
где 1 – включено, 0 – выключено
Преимущество: простота реализации, недостаток: низкое качество регулирования.
2) пропорциональный (п-закон)
U = КП. ε
где КП – коэффициент передачи регулятора.
Преимущества: простота реализации, высокое быстродействие, недостатки: ненулевая ε, низкое качество регулирования.
3) Интегральный (И-закон)
 ,
,
где ТИ – постоянная интегрирования.
Преимущества: отсутствие ошибки в установившемся режиме, недостатки: низкое быстродействие и склонность к автоколебаниям.
4) Пропорционально-интегральный (ПИ-закон)

Обладает преимуществами П- и И- регуляторов. Недостаток: сложность.
Определим КП для П-регулятора по формуле
Для ПИ- регулятора
ТИ = 0,6 . ТОБ = 0,6 . 14 = 8,4 мин
Для определения статической ошибки системы регулирования нужно изобразить эту систему, содержащую регулятор КП и объект КОБ (рисунок 3).
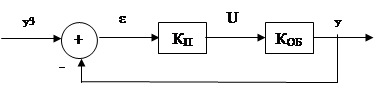
Рисунок 3 – Структурная схема замкнутой системы регулирования
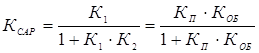
Коэффициент передачи последовательного соединения звеньев равен
К1 = КП. КОБ
Коэффициент передачи обратной связи К2 = 1
Коэффициент передачи замкнутой системы в статике
Принимая величину изменения задания yЗ = 1, находим установившееся значение
yуст = 1 . 0,51 = 0,51
Тогда статическая ошибка равна

![]()
Для уменьшения статической ошибки и сохранения других показателей качества регулирования необходимо применять другие законы регулирования (например И- или ПИ- закон).
4 Исследование устойчивости системы регулирования
Под устойчивостью понимают свойство системы самостоятельно возвращаться к равновесному состоянию после снятия возмущения, нарушевшего ее равновесие.
Устойчивость линейной системы определяется характером его свободного движения, которое описывается однородным дифференциальным уравнением
![]()
При вещественных корнях решение имеет вид
y(t)= c1. eP1t + c2. eP2t + …+ cn. ePnt ,
где cn – постоянная интегрирования
pn – корни характеристического уравнения
an. pn + an-1. pn-1 + …+a0 = 0
Для устойчивой работы системы необходимо, чтобы Pi<0
Решение характеристического уравнения сложно, поэтому разработаны другие критерии устойчивости.
Частотным критерием Найквиста определяют устойчивость замкнутой системы по поведению соответствующей ей разомкнутой системы.
Если в разомкнутом состоянии система устойчива и ее амплитудно-фазовая характеристика (АФХ) при изменении частоты W от нуля до бесконечности не охватывает на комплексной плоскости точку с координатами (-1;0), то система в замкнутом состоянии будет устойчива. АФХ охватывает точку, если точка лежит внутри контура, образованного характеристиками и отрезками действительной оси, соединяющей точки ноль и бесконечность.
Выполним исследование системы на устойчивость. Определим АФХ разомкнутой системы с П-регулятором. Для получения передаточной функции приведем рисунок 4.

Рисунок 4 – Функциональная схема разомкнутой системы регулирования
Передаточная функция разомкнутой системы будет иметь вид
WРАЗ(S) = WP (S) . WОБ (S)
Выполняя замену WР = КП, WОБ (S) = j w получим

Избавляясь от мнимости в знаменателе, получим АФХ в алгебраической форме


Подставляя в полученное выражение численные значения, получим АФХ для исследования устойчивости

Для исследования устойчивости нужно построить годограф АФХ, для чего выполним вычисление R(w) и Im(w) для различных w. Результаты вычислений сведем в таблицу 3.
Таблица 3 – Расчет АФХ разомкнутой системы
| w, мин | R(w) | Im(w) | w, мин | R(w) | Im(w) |
| 0 | 1,05 | 0 | 0,10 | 0,28 | -0,69 |
| 0,01 | 1,04 | -0,12 | 0,11 | 0,19 | -0,68 |
| 0,02 | 1,00 | -0,25 | 0,12 | 0,11 | -0,65 |
| 0,03 | 0,95 | -0,36 | 0,13 | 0,05 | -0,61 |
| 0,04 | 0,88 | -0,46 | 0,14 | -0,01 | -0,57 |
| 0,05 | 0,79 | -0,55 | 0,15 | -0,05 | -0,52 |
| 0,06 | 0,69 | -0,61 | 0,20 | -0,15 | -0,34 |
| 0,07 | 0,59 | -0,66 | 0,30 | -0,14 | -0,14 |
| 0,08 | 0,48 | -0,69 | 0,40 | -0,10 | -0,06 |
| 0,09 | 0,38 | -0,70 | 0,50 | -0,07 | -0,03 |
По результатам расчетов строим годограф (рисунок 5). Из рисунка видно, что система в замкнутом состоянии будет устойчива.
0 комментариев