Навигация
3 Выбор системы прототипа
Начиная с 1970-х гг., было разработано множество прикладных пакетов моделирования, автоматизирующих прежде всего этап представления математической модели для компьютера. Среди них лидирующее положение для исследования динамических систем занимают пакеты MATLAB и Simulink фирмы Math Work.
Первая версия пакета MATLAB была разработана уже более 20 лет тому назад. Развитие и совершенствование этого пакета происходило одновременно с развитием средств вычислительной техники. Название пакета MATLAB происходит от словосочетания Matrix Laboratory, он ориентирован в первую очередь на обработку массивов данных (матриц и векторов). Именно поэтому, несмотря на достаточно высокую скорость смены поколений вычислительной техники, MATLAB успевал впитывать все наиболее ценное от каждого из этих поколений.
В результате к настоящему времени MATLAB представляет собой богатейшую библиотеку функций, единственной проблемой работы с которыми заключается в умении быстро отыскать те из них, которые нужны для решения поставленной задачи.
Для облегчения работы с пакетом специалистам различных областей науки и техники вся библиотека функций разбита на разделы. Те из них, которые носят общий характер, входят в состав ядра MATLAB. Те же функции, которые являются специфическими для конкретной области, включены в состав пакетов расширения (Toolboxes, Blocksets).
В настоящее время появилась новая, существенно расширенная, версия R2006a, Simulink-6. Этой версии ниже уделено основное внимание. Однако необходимо отметить, что библиотеки старых версий с их интерфейсом сохранены.
Пакет Simulink является приложением к пакету MATLAB. При моделировании с использованием Simulink реализуется принцип визуального программирования, в соответствии с которым пользователь на экране из библиотек стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от классических способов моделирования, пользователю не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний, требующихся при работе на компьютере и естественно, знаний той предметной области, в которой он работает[5].
Simulink является достаточно самостоятельным инструментом MATLAB и при работе с ним совсем не требуется знать сам MATLAB и остальные его приложения. С другой стороны, доступ к функциям MATLAB и другим его инструментам остается открытым и их можно использовать в Simulink. Часть входящих в состав пакетов имеет инструменты, встраиваемые в Simulink (например, LTT-Viewer приложения Control System Toolbox — пакета для разработки систем управления). Имеются также дополнительные библиотеки блоков для разных областей применения (например, Sim Power System — моделирование электротехнических устройств, Digital Signal Processing Blockset — набор блоков для разработки цифровых устройств и т. д.).
При работе с Simulink пользователь имеет возможность модернизировать библиотечные блоки, создавать свои собственные, а также составлять новые библиотеки блоков.
При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящей в системе.
Развитие и совершенствование среды MATLAB – Simulink происходит достаточно быстро. С момента выхода MATLAB 6.0 для моделирования полупроводниковых систем, прошло около пяти лет. За это время разработано семь новых версий пакета, причем начиная с версии MATLAB 7.0 существенной переработки подвергся пакет расширения Sim Power System. Именно этот пакет расширения является основным при модельном исследовании и проектировании электромеханических систем.
Данная монография представляет собой учебник по моделированию электромеханических систем в среде MATLAB-Simulink и содержит всю необходимую информацию по всем разделам последней версии среды (R 2006 а), которые необходимы для изучения.
Целью разработки пакета является изучение физических основ функционирования отдельных элементов электромеханических системы и проектирования этих систем в среде MATLAB-Simulink.
Эта цель достигается последовательным изложением следующих вопросов:
1 Модельным исследованием общих задач анализа и синтеза динамики электромеханических систем в среде Matlab-Simulink.
2 Модельным исследованием устройств силовой электроники в пакете Sim Power System.
3 Модельным проектированием электромеханических систем постоянного тока.
4 Модельным проектированием асинхронных электромеханических систем.
5 Модельным проектированием синхронных электромеханических систем.
Рассмотрим пример установки - (прямого пуска асинхронного двигателя) с помощью пакета MATLAB и Simulink фирмы Math Work основано на замене исходного объекта объектом обладающим аналогичным поведением.
Пример
Виртуальная модель для исследования прямого пуска АКЗ на холостом ходу с последующим приложением номинального момента показана на рисунке 1- (файл AKZ_Virt).
Модель содержит трехфазную асинхронную машину (Asynchronous Machine SI Units), запитанную. от трехфазного источника (Three-Phase Source), блок для измерения скорости и момента машины (Machines Measurement Demux), блок момента нагрузки (Step) и блоки измерения (Scope, To Workspace).
При запуске модели осуществляется прямой пуск АКЗ, по истечению некоторого времени прикладывается момент нагрузки. Результаты моделирования машины тип двигателя 20HP , мощность -15 kw, напряжение 400V, частота 50Hz 1460 RPM, представлены на рисунке 1.
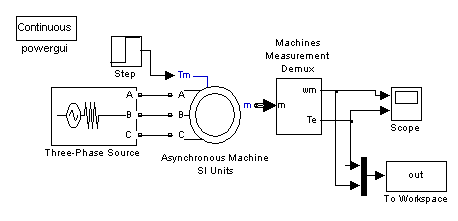
Рисунок 1 Модель асинхронного короткозамкнутого двигателя составлена из библиотеки пакета Sim Power System
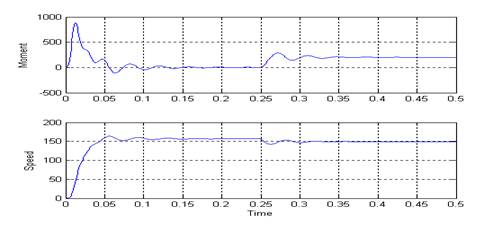
Рисунок 2- модель с блоками: To File и Form File динамическая характеристика машины 20HP
Из результатов моделирования видно, что при прямом пуске на холостом ходу и при приложении нагрузки наблюдаются значительные колебания момента и скорости.
Виртуальная установка для исследованиея механических, электромагнитных и энергетических характеристик асинхронной машины во всем диапазоне изменения скольжения.
Сложность построения модели для проведения исследования заключается в том, механическая характеристика асинхронных машин имеет только одну устойчивую область работы в диапазоне изменения скольжения.
Остальные области механических характеристик являются областями неустойчивой работы.
Задача построения модели с последующим исследованием механических, электромагнитных и энергетических характеристик АМ во всем диапазоне изменения скольжения может быть решена при использовании подхода, описанного ниже.
Этот подход базируется на формировании нагрузочного момента в точности совпадающего с моментом исследуемого АКЗ и одновременным управлением скоростью двигателя. Модель такой виртуальной установки показана на риснке 3 - (файл AKZ_stat).
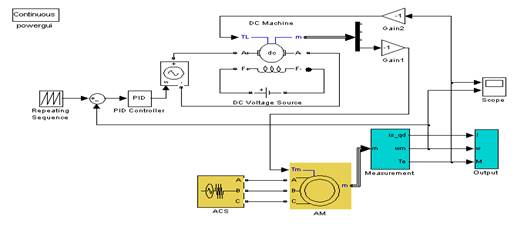
Рисунок 3 – Модель виртуальной установки для снятия статических характеристик асинхронной машины
Модель содержит две электрические машины одну асинхронную машину (АМ) со своим источником питания (ASC). Вторую машину постоянного тока (DCM) с источником питания обмотки возбуждения (DCS) и регулируемым источником в якорной цепи (CVS). Электромагнитный момент асинхронной машины является нагрузкой на валу машины постоянного тока, а электромагнитный момент машины постоянного тока служит нагрузкой на валу асинхронной машины.
При таком построении моменты обеих машин будут всегда (в установившемся режиме) равны и противоположны по знаку. Для задания скорости вращения исследуемой асинхронной машины машина постоянного тока управляется от регулятора, на вход которого поступает сигнал задания и сигнал обратной связи - скорость асинхронной машины. Блок (Measurement) является библиотечным блоком для измерения переменных состояния асинхронной машины.
Блок (Output) служит для передачи в рабочее пространство переменных для вычисления механических, электромагнитных и энергетических характеристик асинхронной машины. Модель этого блока представлена на рис.6.14. Здесь вычисляется скольжение, амплитуда тока статора и коэффициент мощности. Блок (To Workspace) служит для передачи данных в рабочее пространство Matlab.
Программа для расчета статических характеристик представлена в файле (AKZ_ Char), а сами характеристики показаны на рисунке 4.
Каждый из перечисленных разделов содержит теоретическую часть, подкрепленную практическими моделями. При этом пользователю рекомендуется самому реализовать модель согласно описанию. В том, что это описание далеко не всегда даст исчерпывающие ответы на массу вопросов, возникающих при разработке модели.
Пакет программ MATLAB-Simulink может быть полезен для следующих категорий пользователей: инженерам-проектировщикам электромеханических систем и желающим повысить уровень компьютерной грамотности.
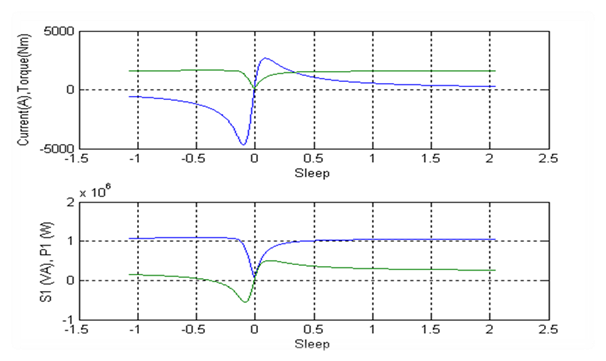
Рисунок 4 - статические характеристики асинхронной машины
0 комментариев