Навигация
Анализ САР регулирования частоты вращения приводного электродвигателя стенда для обкатки ДВС
14197
знаков
2
таблицы
6
изображений
Министерство сельского хозяйства и продовольствия РБ
Белорусский государственный аграрный технический университет
Кафедра автоматизированных систем управления производством.
КУРСОВАЯ РАБОТА
ТЕМА: “Анализ САР регулирования частоты вращения приводного электродвигателя стенда для обкатки ДВС”
Выполнил: студент 3 курса
11 ЭПТ группы
Давыденков М. А.
Проверил: Дудников И.Л.
Минск 2008 г.
Введение
Цель работы: закрепление базовых знаний по курсу «Основы автоматики» на примере проведения анализа системы автоматического регулирования.
Задание:
Дать краткую характеристику объекта управления, описать устройство и работу системы, составить её функциональную схему. Сделать вывод о принципе автоматического управления, использованном в системе, и виде системы.
Составить структурную схему системы.
Определение закона регулирования системы.
Определить передаточные функции системы по управляющему (задающему), возмущающему воздействиям и для ошибок по этим воздействиям.
Выполнить анализ устойчивости системы по критериям Гурвица и Найквиста. Определить запасы устойчивости.
Проанализировать зависимость статической ошибки системы от изменения управляющего (задающего) воздействия на систему. Сделать вывод о характере этой системы.
Провести совместный анализ измерения управляемой (регулируемой) величины объекта управления и системы от возмущающего воздействия в статике. Дать их сравнительную оценку. Определить статическую ошибку системы по возмущающему воздействию.
Оценить качество управления по переходным функциям.
Сделать общие выводы по работе.
Данные согласно варианту задания сводим в табл. 1.
Таблица 1. Исходные данные.
| вариант | схема | К1 | К2 | Т1,с | Кд | Тд, с | Ку | Кдв | Кр | Кв | Кп | Тдв, с |
| 13 | 20 | 50 | 0,4 | 4 | 0,1 | 0,1 | 50 | 0,002 | 0,1 | 5 | 5 | 0,5 |
| |
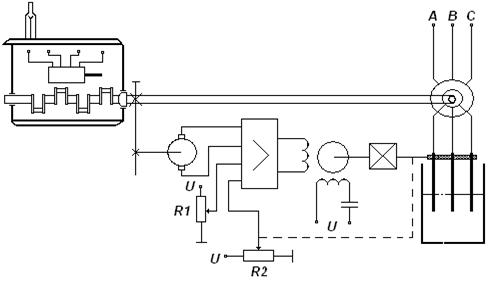
Рис.1 САР частоты вращения приводного электродвигателя стенда для обкатки ДВС.
1. Характеристика объекта управления, описание устройства и работы САР, составление её функциональной схемы. Принцип автоматического управления и вид системы
САР частоты вращения приводного электродвигателя стенда для обкатки ДВС состоит из объекта управления и регулятора.
Объектом управления (ОУ) рассматриваемой САР является асинхронный электродвигатель с фазным ротором. Регулируемой величиной является частота вращения вала двигателя ω. Целью управления является поддержание частоты вращения ω на заданном уровне путем изменения сопротивления в цепи ротора асинхронного электродвигателя. Управляющим воздействием на ОУ является угол поворота вала, присоединенного к реостату, φр. Основное возмущающее воздействие изменение момента сопротивления Мс на валу двигателя.
1. Датчиком (Д) является тахогенератор постоянного тока Uд. Входной сигнал для тахогенератора – частота вращения вала двигателя, выходной сигнал – напряжение Uд датчика.
Задатчиком системы является сопротивление R1. Задающий сигнал – это величина напряжения U3, которое в определенном масштабе соответствует заданному значению частоты вращения вала ω.
2. Дифференциальный усилитель (ДУ) 2 выполняет так же и функции сравнивающего устройства (СУ), сравнения (вычитания) входных сигналов и усиления их разности. На вход усилителя поступают напряжения задатчика UЗ , напряжение с тахогенератора UД и Uос устройства обратной связи. Выходной сигнал усилителя - напряжение Uу, подаваемое на электродвигатель 3.
3. Исполнительное устройство представляет собой исполнительный механизм, который состоит из электродвигателя (Дв) 3 и редуктора (Р) 4. Входной сигнал для электродвигателя – напряжение Uу, выходной сигнал – угол поворота φдв вала электродвигателя. Входной сигнал для редуктора - φдв, выходной сигнал - угол поворота вала φр редуктора.
4. Устройство местной обратной связи (УОС) выполнено в виде потенциометрического датчика (6). Входной сигнал УОС – угол поворота φр, выходной сигнал – напряжение Uос.
5. Регулирующим органом (РО) является жидкостной реостат 5 который изменяет сопротивление в роторе электродвигателя 7. Входной сигнал – угол поворота φр, выходной сигнал – сопротивление Rф.
На основании вышеизложенного составлена функциональная схема системы, которая приведена на Рис.2.
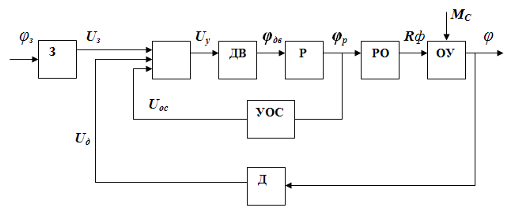
Рис.2 Функциональная схема САР частоты вращения приводного электродвигателя стенда для обкатки ДВС.
Система работает следующим образом:
В установившемся режиме при равенстве частоты вращения ω ротора двигателя заданной ω з , напряжения Uз ,Uос ,Uд взаимно компенсируются и выходное напряжение UУ на ДУ равно 0. При отклонении частоты вращения от заданной, например, из-за изменения момента на валу ДВС Мс, напряжение на выходе датчика Uд изменяется, появится разность напряжений в результате чего на выходе ДУ появится напряжение UУ отличное от нуля. Напряжение UУ подается на электродвигатель. Двигатель через редуктор изменяет положение жидкостного сопротивления, тем самым, увеличивая или уменьшая частоту вращения вала ротора, возвращая её к заданному значению. Одновременно выходной вал редуктора перемещает подвижный контакт потенциометрического датчика местной обратной связи. Выходное напряжение Uос которого подается на ДУ . За счет местной обратной связи обеспечивается пропорциональная зависимость между напряжением Uд и углом поворота вала редуктора.
В результате рассмотрения устройства и работы системы можно сделать следующие выводы:
В системе реализован принцип управления по отклонению (ошибке).
Система является стабилизирующей.
0 комментариев