Навигация
Составление структурной схемы системы
14197
знаков
2
таблицы
6
изображений
2. Составление структурной схемы системы
Для составления структурной схемы получим передаточные функции всех элементов системы.
Уравнение объекта управления:
![]()
Изображение Лапласа этого уравнения:
![]()
Передаточная функция по управляющему воздействию:
![]()
![]()
По возмущающему воздействию:
![]()
Датчик частоты вращения (тахогенератор):
![]()
![]()
3. Задатчик:
![]()
![]()
Дифференциальный усилитель:
![]()
![]()
![]()
Двухфазный АД с амплитудным управлением:
![]()
![]()
![]()
Редуктор:
![]()
![]()
Устройство обратной связи:
![]()
![]()
Регулируемый жидкостной реостат:
![]()
![]()
Структурная схема системы показана на Рис. 3
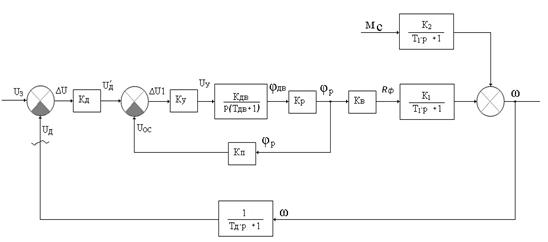
Рис. 3 Структурная схема САР частоты вращения приводного электродвигателя стенда для обкатки ДВС.
Так как задатчик является безинерционным его коэффициент передачи ![]() должен быть равен коэффициенту передачи
должен быть равен коэффициенту передачи ![]() датчика, поскольку заданное UЗ и действительное U напряжения должны вычитаться в одном масштабе. Поэтому для наглядности исследования эти коэффициенты
датчика, поскольку заданное UЗ и действительное U напряжения должны вычитаться в одном масштабе. Поэтому для наглядности исследования эти коэффициенты ![]() можно перенести за СУ и считать, что из заданного напряжения UЗ непосредственно вычитается измеренное датчиком и формируется сигнал ошибки
можно перенести за СУ и считать, что из заданного напряжения UЗ непосредственно вычитается измеренное датчиком и формируется сигнал ошибки ![]() .
.
3. Определение закона регулирования системы
Определяем закон регулирования рассматриваемой САР частоты вращения приводного электродвигателя стенда для обкатки ДВС. Для этого найдём передаточную функцию, определяющую взаимосвязь управляющего воздействия RФ на объект и ошибку ![]() :
:
![]()
Предварительно заменим звенья, охваченные местной обратной связью (УОС) с коэффициентом передачи Kп, одним эквивалентным звеном.
Передаточная функция цепи охваченной местной обратной связью, определяется по формуле:


Подставим в найденное выражение численные значения параметров и получим:
![]()
При последовательном соединении звеньев их передаточные функции перемножаются, поэтому:
![]()
Окончательно для безинерционного регулятора получаем:
![]()
Зависимость управляющего воздействия RФ от ошибки е показывает, что в рассматриваемой системе применен П-закон регулирования.
4. Определение передаточных функций системы по управляющему и возмущающему воздействиям и для ошибок по этим воздействиям
Передаточная функция САР по управляющему воздействию:
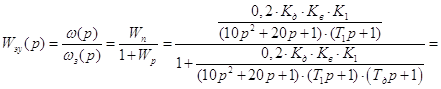

= ![]()
Передаточная функция САР по возмущающему воздействию:
 =
=

Передаточная функция САР для ошибки по управляющему воздействию:
![]()


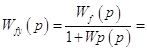
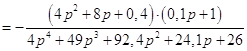
Передаточная функция САР для ошибки по возмущающему воздействию:

![]()
0 комментариев