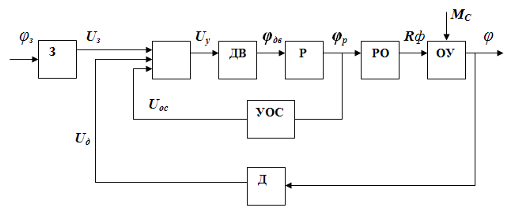
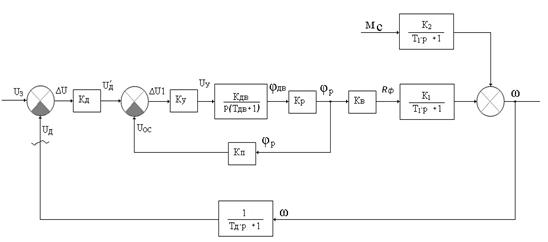
Составление структурной схемы системы автоматического регулирования температуры в животноводческом помещении
Определение передаточных функций системы по управляющему и возмущающему воздействию и для ошибок по этим воздействиям
Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
Навигация
Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
Анализ системы автоматического регулирования температуры воздуха в животноводческом помещении
19360
знаков
2
таблицы
9
изображений
6. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
При выполнении такого анализа используют передаточную функцию системы для ошибки по управляющему воздействию.
![]()
В статике (при р=0) обращается в ноль, поэтому статическая ошибка по управляющему воздействию отсутствует.
![]()
где к – коэффициент передачи разомкнутой системы.
![]()
После подстановки численного значения к получаем: ![]()
Рассматриваемая система имеет статическую ошибку, пропорциональную изменению управляющего воздействия на систему. Из выражения для статической ошибки следует, что величина статической ошибки тем меньше, чем больше коэффициент передачи разомкнутой системы.
7. Совместный анализ изменения управляемой величины объекта управления и системы от возмущающего воздействия в статике. Определение статической ошибки системы по возмущающему воздействию
Для проведения такого анализа пользуются передаточными функциями объекта управления и системы по возмущающему воздействию, а также передаточной функцией системы для ошибки по возмущающему воздействию.


Так как в статике (при р=0) обращается в ноль.
Получим:
![]()
Для системы
![]()
После подстановки численных значений получаем зависимость изменения температуры на объекте при изменении наружной температуры:
![]() – для объекта без регулятора;
– для объекта без регулятора;
![]() – для объекта с регулятором (САР).
– для объекта с регулятором (САР).
Передаточная функция системы для ошибки по возмущающему воздействию:
![]()
Поэтому ест=![]()
Таким образом температура воздуха в животноводческом помещении не оборудованного регулятором изменяется также, как изменяется наружная температура. В животноводческом помещении с регулятором изменение температуры уменьшилось по сравнению с изменением температуры в К+1 раз. В нашем случае температура внутри составляет около 11% от изменения наружной температуры. Это свидетельствует о том, что эксплуатационные качества животноводческого помещения с точки зрения постоянства поддержания требуемой температуры существенно улучшилось.
8. Оценка качества управления по переходным функциям
Качество переходных процессов в линейных системах обычно оценивают по переходным функциям.
Переходной функцией h(t) называется график изменения во времени управляемой (регулируемой) величины системы при подаче на систему единичного управляющего или возмущающего воздействий.
Показатели качества управления, определяемые непосредственно по переходным функциям, называют прямыми показателями качества управления.
Рассмотрим оценку прямых показателей качества управления для нашей системы.
Отклонение регулируемой величины от своего установившегося значения характеризуется следующими показателями.
Для переходной функции по управляющему воздействию определяется перерегулирование:
![]() ,
,
где ![]() - максимальное значение регулируемой величины в переходном процессе;
- максимальное значение регулируемой величины в переходном процессе;
![]() - установившееся значение регулируемой величины.
- установившееся значение регулируемой величины.
В нашем случае
![]()
Перерегулирование характеризует запас устойчивости системы. В нашем случае система полностью устойчива. Для переходных функций по возмущающему воздействию определяется максимальное отклонение регулируемой величины от установившегося значения, приходящейся на единицу возмущающего воздействия F(t):
![]() .
.
В нашем случае
![]()
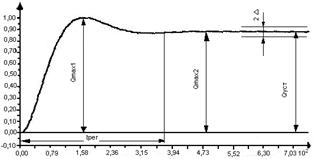
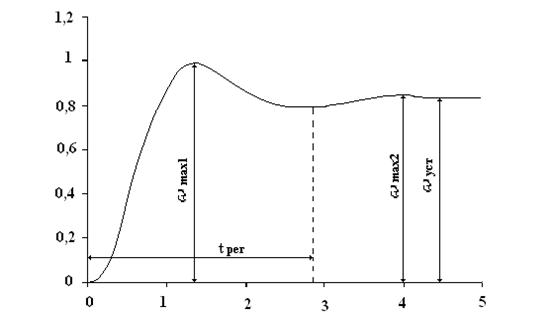
Рис.6 Переходная функция по управляющему воздействию САР температуры в животноводческом помещении.
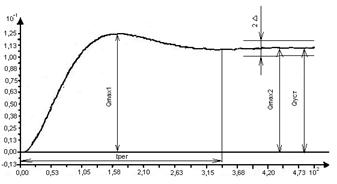
Рис.7 Переходная функция по возмущающему воздействию САР температуры в животноводческом помещении.
Быстродействие системы оценивается временем регулирования. Время регулирования ![]() определяется как интервал времени от начала переходной функции до момента, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины ∆:
определяется как интервал времени от начала переходной функции до момента, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины ∆:
![]() .
.
Примем ![]()
В нашем случае для переходной функции по возмущающему воздействию:
![]() ;
; ![]() с (рисунок. 6).
с (рисунок. 6).
Для переходной функции по управляющему воздействию:
![]() ;
; ![]() с (рисунок. 7).
с (рисунок. 7).
Колебательность переходного процесса определяется числом N перерегулирований для переходной функции по управляющему воздействию или числом колебаний N для переходной функции по возмущающему воздействию за время переходного процесса. В нашем случае N=1.
Перерегулирование и максимальное отклонение регулируемой величины от установившегося значения также служат оценкой колебательности.
Для переходного процесса по управляющему воздействию (рисунок. 6):
![]()
![]()
Для переходного процесса по возмущающему воздействию (рисунок. 7):
![]()
Статическая ошибка системы:
![]()
что приблизительно совпадает с результатом, полученным в разделе 6 при ![]() .
.
Статическая ошибка по возмущающему воздействию:
![]()
По результатам выполнения этого раздела для САР температуры воздуха в птичнике в летний период, следует сделать следующие выводы:
Для рассмотренной системы перерегулирование составляет 13,6%, число перерегулирований и колебаний системы за время переходного процесса N=1. Качество системы по этим показателям следует считать удовлетворительным.
Время регулирования составляет около ![]() с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет
с, максимальное отклонение регулируемой величины от ее установившегося значения, приходящееся на единицу ступенчатого возмущающего воздействия, составляет ![]() , колебательность системы около 0,05, изменение статической ошибки системы при изменении задающего воздействия и возмущающего воздействия составляет 11% от изменения этих воздействий.
, колебательность системы около 0,05, изменение статической ошибки системы при изменении задающего воздействия и возмущающего воздействия составляет 11% от изменения этих воздействий.
Общие выводы по работе
Объектом управления САР температуры воздуха в животноводческом помещении, является помещение с электрокалорифером.
Управляющим воздействием на объект является степень смешивания холодного и регулирующего воздуха. Основное возмущающее воздействие –изменения температуры наружного воздуха. Закон регулирования системы пропорциональный. Система устойчива. Система является астатической.
Прямые оценки показателей качества управления следующие: перерегулирование ![]() , число пререгулирований N=1, что удовлетворяет требованиям и свидетельствует о достаточном запасе устойчивости.
, число пререгулирований N=1, что удовлетворяет требованиям и свидетельствует о достаточном запасе устойчивости.
Время регулирования ![]() с, максимальное отклонение регулируемой величины от её установившегося режима приходящееся на единицу ступенчатого возмущения равно
с, максимальное отклонение регулируемой величины от её установившегося режима приходящееся на единицу ступенчатого возмущения равно ![]() , колебательность системы равна 0,083. Качество системы следует считать удовлетворительным.
, колебательность системы равна 0,083. Качество системы следует считать удовлетворительным.
Литература
1. Юревич Е. Н. Теория автоматического управления. – Л.: Энергия, 1975.—416с
2. Бородин И. Ф., Кирилин Н. И. Основы автоматики и автоматизации производственных процессов. – М.: Колос, 1977. – 328с.
3. Теория автоматического управления. Ч.1./ Н. А. Бабанов, А. А. Воронов и др. – М.: Высш шк., 1986. – 367с.
4. Солодовников В. В., Плотников В. Н., Яковлев А. В. Основы теории и элементы систем автоматического регулирования. – М.: Машиностроение, 1985. – 536с.
5. Средства автоматики и телемеханики./Н.И. Бохан, И. Ф. Бородин, Ю. В. Дробышев, С. Н. Фурсенко, А. А. Герасенков. – М.: Агропромиздат, 1992. –351с.
6. Бородин И. Ф. Технические средства автоматики. – М.: Колос, 1982. – 303с.
7. Бохан Н. И., Фурунжиев Р. И. Основы автоматики и микропроцессорной техники. – Мн.: Ураджай, 1987. - 376с.
Похожие работы
... всех категорий работников. Опыт отечественного птицеводства показывает, что высокая организация технологического процесса – решающий фактор увеличения объема, улучшения качества продукции и повышения экономической эффективности ее производства. 1.3 Состояние отрасли мясного птицеводства на Кубани Положение кубанских птицеводческих предприятий, как и предприятий других отраслей АПК, по ...
... непосредственно вычитается измеренное датчиком и формируется сигнал ошибки . 3. Определение закона регулирования системы Определяем закон регулирования рассматриваемой САР частоты вращения приводного электродвигателя стенда для обкатки ДВС. Для этого найдём передаточную функцию, определяющую взаимосвязь управляющего воздействия RФ на объект и ошибку : Предварительно заменим звенья, ...
... электробезопасности должны знать прежде всего электромонтеры, механизаторы, разнорабочие, а также представители других профессий, связанные с электричеством непосредственно или косвенно. Животноводческая ферма крупно рогатого скота запитана от трансформаторной подстанции с глухозаземленной нейтралью. Сеть выполнена четырехпроводой. Нулевой провод повторно заземляется в конце линии при вводе в ...
... наружного воздуха не известны. Необходимо подчеркнуть, что для животноводческих помещений температура переходного периода составляет -5….-10 ºС, и существенно отличается от принятой для расчетов вентиляции гражданских и промышленных зданий. Определяем в первом приближении начальную температуру переходного периода по формуле: где ∑F/R0 – суммарный поток теплоты, теряемый сквозь ...
0 комментариев