Навигация
Классификация гидроусилителей
29808
знаков
0
таблиц
13
изображений
2. Классификация гидроусилителей
Применяемые в автоматизированных гидроприводах гидроусилители классифицируют по следующим признакам.
По методу управления различают гидроусилители без обратной связи и с обратной связью между управляющим элементом и ведомым звеном исполнительного механизма.
По конструкции управляющего элемента гидроусилители подразделяют на усилители с дросселирующими гидрораспределителями золотникового типа, с соплом и заслонкой, со струйной трубкой, крановые, с игольчатым дросселем.
По числу каскадов усиления гидроусилители подразделяют на одно-, двух- и многокаскадные. Многокаскадные применяют в тех случаях, когда требуется получить на выходе большую мощность и сохранить при этом высокую чувствительность гидроусилителя.
По виду сигнала управления гидроусилители подразделяют на усилители с механическим и электрическим сигналами управления.
Важными характеристиками усилителей являются коэффициенты усиления: по мощности kN, по расходу kQ, по скорости kυ и по давлению kP
:![]()
где Nвых, Nвх - мощности на ведомом звене исполнительного элемента гидроусилителя и мощность, затрачиваемая на его управление; δQ, δυ, δP - изменение расхода, скорости движения ведомого звена исполнительного элемента и давления жидкости на выходе при изменении положения управляющего элемента гидроусилителя на величину δx.
3. Типы гидроусилителей
3.1 Гидроусилитель золотникового типа
Гидроусилители золотникового типа получили наибольшее распространение. Они просты по конструкции, разгружены от аксиальных статических сил давления жидкости, легко управляемы, имеют высокий КПД и обеспечивают достижение значительных коэффициентов усиления по мощности.
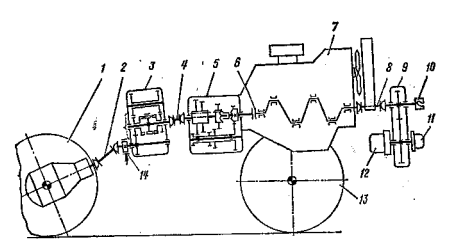
Схема следящего гидроусилителя золотникового типа с гидродвигателем прямолинейного движения и жесткой рычажной обратной связью представлена на рис.4.
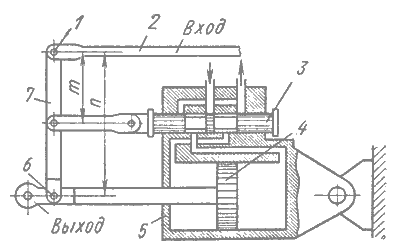
Рис.4. Схем гидроусилителя золотникового типа с обратной связью:
1 - шарнир; 2 - тяга; 3 - золотник распределителя; 4 - поршень;
5 - корпус силового цилиндра; 6 - шарнир; 7 - дифференциальный рычаг
Этот гидроусилитель состоит в основном из тех же элементов что и рассмотренный выше усилитель рулевого привода автомобиля. При перемещении тяги 2, связанной с ручкой управления, перемещается шарнир 1 дифференциального рычага 7 обратной связи, с которым вязаны штоки силового цилиндра 5 и золотника распределителя 3. Так как силы, противодействующие смещению золотника распределителя, значительно меньше соответствующих сил, действующих в системе силового поршня 4, то шарнир 6 может рассматриваться в начале движения тяги 2 как неподвижный, ввиду чего движение его вызовет через рычаг 7 смещение плунжера золотника распределителя 3. В результате при смещении золотника из нейтрального положения, жидкость поступит в соответствующую полость цилиндра 5, что вызовет перемещение поршня 4, а следовательно, и шарнира 6, связанного с "выходом". При этом выходное звено сместится пропорционально перемещению тяги 2.
После того как движение тяги 2 будет прекращено, продолжающийся выдвигаться поршень 4 сообщит через рычаг 7 обратной связи плунжеру золотника распределителя 3 перемещение, противоположное тому, которое он получал до этого при смещении тяги 2 управления. Так как при этом расходные окна золотника будут в результате обратного движения плунжера постепенно прикрываться, количество жидкости, поступающей в цилиндр 5, уменьшится, вследствие чего скорость его поршня будет уменьшаться до тех пор, пока плунжер золотника не придет в положение, в котором окна полностью перекроются, при этом скорость станет равной нулю.
При перемещении плунжера золотника в противоположную строну движение всех элементов регулирующего устройства будет происходить в обратном направлении.
В действительности отдельных этапов движения "входа" и "выхода" рассматриваемого следящего привода с жесткой обратной связью не существует, и оба движения протекают практически одновременно, т.е. имеет место не ступенчатое, а непрерывное "слежение" исполнительным механизмом за перемещением "входа".
3.2 Гидроусилитель с соплом и заслонкой
. 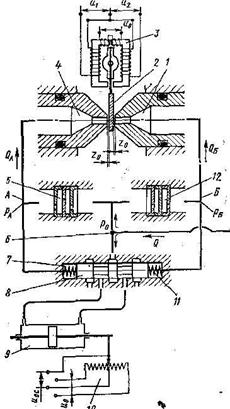
Рис.5. Схема гидроусилителя типа сопло-заслонка
Гидроусилитель типа сопло-заслонка показан схематически на рис. 5. состоит из сопел 1 и 4, которые вместе с подвижной заслонкой 2 образуют два регулируемых щелевых дросселя, и нерегулируемых дросселей 5 и 12, установленных на пути подвода жидкости из точки 6, куда она подается от насоса. Работа такой дроссельной системы, являющейся первым каскадом гидроусилителя. Исполнительным механизмом гидроусилителя служит гидроцилиндр 9.
Первый каскад управляет смещением золотника 8, который является вторым каскадом гидроусилителя и непосредственно управляет гидроцилиндром.
Вся система нужна для того, чтобы на входе мог быть использован маломощный электрический командный сигнал от задающей электронной аппаратуры. Этот сигнал подается на подается обмотки миниатюрного электромеханического преобразователя 3 (поворотного электродвигателя) в виде разности напряжений ![]() и
и ![]() в результате чего происходит отклонение заслонки 2, до ее отклонения обе дросселирующие ветви А и Б имели одинаковые сопротивления и пропускали одинаковые расходы
в результате чего происходит отклонение заслонки 2, до ее отклонения обе дросселирующие ветви А и Б имели одинаковые сопротивления и пропускали одинаковые расходы ![]() и
и ![]() . После отклонения сопротивление сопла, к которому приблизилась заслонка, увеличивается и расход через него уменьшается. Расход в другой ветви возрастает. При этом возникает неравенство давлений
. После отклонения сопротивление сопла, к которому приблизилась заслонка, увеличивается и расход через него уменьшается. Расход в другой ветви возрастает. При этом возникает неравенство давлений ![]() и
и ![]() в узловых точках ветвей. Эта разница давлений вызывает смещение золотника 8 центрируемого пружинами 7 в 11, что в конечном итоге приводит в действие гидроцилиндр.
в узловых точках ветвей. Эта разница давлений вызывает смещение золотника 8 центрируемого пружинами 7 в 11, что в конечном итоге приводит в действие гидроцилиндр.
Если в такой системе па выходе исполнительного механизма, предусмотрен датчик обратной связи 10, сигнализирующий об исполнении подавной команды напряжением, ослабляющим сигнал на входе, то она будет представлять электрогидравлическую следящую систему.
Главным преимуществом такого гидроусилителя является применение простейших квадратичных дросселей, но чувствительных к засорениям и к изменению вязкости жидкости. Такие дроссели, имея нелинейные характеристики, позволяют при взаимодействии получить характеристики со взаимосвязью входных и выходных параметров близкой к линейной. В рассматриваемой системе, входной параметр — отклонение заслонки 3 ,а выходной — различие давлений ![]() и
и ![]() , смещающее золотник 8. Линейность таких взаимосвязей всегда желательна, так как упрощает применение гидроусилителя в качестве составной части сложных автоматических систем.
, смещающее золотник 8. Линейность таких взаимосвязей всегда желательна, так как упрощает применение гидроусилителя в качестве составной части сложных автоматических систем.
Уравнения пропускной способности ветвей А и В гидроусилителя, в которых нерегулируемый дроссель и регулируемое сопло пропускают одинаковый расход, имеют вид


где ![]() коэффициент расхода дросселя;
коэффициент расхода дросселя; ![]() — коэффициент расхода сопла.
— коэффициент расхода сопла.
Значения коэффициентов ![]() и
и ![]() для этих элементов в ветвях А и Б, вообще говоря, могут быть различны из-за различия расходов
для этих элементов в ветвях А и Б, вообще говоря, могут быть различны из-за различия расходов ![]() и смещений
и смещений ![]() , ведущего к различию в
, ведущего к различию в ![]() .
.
Смещения ![]() заслонки по отношению к двум соплам взаимосвязаны:
заслонки по отношению к двум соплам взаимосвязаны:
![]()
![]()
![]()
Максимальное смещение ![]() не может превышать для упрощении
не может превышать для упрощении ![]() . Для упрощения записи введем понятия
. Для упрощения записи введем понятия ![]() проводимости элементов: для нерегулируемых дросселей
проводимости элементов: для нерегулируемых дросселей  - близкая к постоянной величина, изменяющаяся только с изменением
- близкая к постоянной величина, изменяющаяся только с изменением ![]() ; для регулируемых дросселей сопел -
; для регулируемых дросселей сопел -  -переменная величина из-за переменности
-переменная величина из-за переменности ![]() и
и![]() .
.
Примем выработанные практикой рекомендации для соотношений размеров и проводимостей таких гидроусилителей:
![]()
![]()
Решая совместно уравнения для ![]() и
и ![]() с применением принятых обозначении и предпосылок, получаем уравнения статической характеристики гидроусилителя (предположено, что заслонка приближается к соплу 4 и открывает сопло1):
с применением принятых обозначении и предпосылок, получаем уравнения статической характеристики гидроусилителя (предположено, что заслонка приближается к соплу 4 и открывает сопло1):
![]()
![]()
![]()
Характеристики, построенные по этим уравнениям показаны на рис. 6.
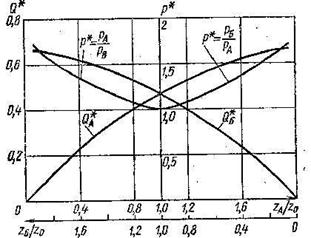
Рис.6. Характеристика гидроусилителя типа сопло заслонка
График ![]() относительного различия давлений симметричен относительно оси, соответствующей среднему положению заслонки
относительного различия давлений симметричен относительно оси, соответствующей среднему положению заслонки ![]() . При любом соотношении взаимосвязанных смещений
. При любом соотношении взаимосвязанных смещений ![]() и
и ![]() по графику
по графику ![]() можно найти полный расход
можно найти полный расход ![]() через ветви гидроусилителя. При среднем положении заслонки это расход максимален.
через ветви гидроусилителя. При среднем положении заслонки это расход максимален.
Рис. 6. показывает, что при соблюдении приведенных выше рекомендаций о размерах и проводимостях элементов дроссельной системы, гидроусилитель способен обеспечить взаимосвязь между смещением заслонки ![]() и величиной
и величиной ![]() относительного различия давлений, близкую к линейной.
относительного различия давлений, близкую к линейной.
Двустороннее воздействие струй на заслонку позволяет использовать для ее отклонения поворотные электродвигатели, расходующие весьма малую электрическую мощность.
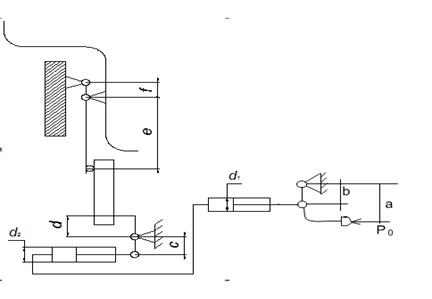
Гидроусилитель с соплом и заслонкой (рис.7) состоит из управляющего элемента в виде нерегулируемого дросселя 1, междроссельной камеры 2, регулируемого дросселя, выполненного в виде сопла 3, заслонки 4 и задающего устройства 6, а также из исполнительного элемента 5.
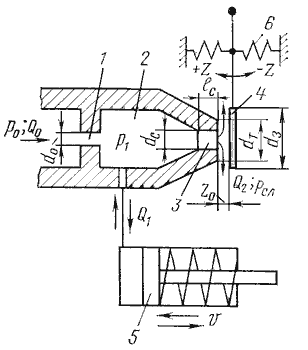
Рис.7. Гидроусилитель с соплом и заслонкой:
1 - нерегулируемый дроссель; 2 - междроссельная камера; 3 - сопло;
4 - заслонка; 5 - исполнительный элемент; 6 - задающее устройство
Жидкость подается к гидроусилителю со стороны нерегулируемого дросселя. Из междроссельной камеры одна часть жидкости Q2 вытекает через щель, образованную торцом сопла и заслонкой, а другая Q1 поступает к исполнительному элементу. При изменении положения заслонки изменяются давление в междроссельной камере и расход через сопло. Одновременно изменяются усилие на исполнительный элемент, расход Q1 и скорость υ движения выходного звена. Нерегулируемый дроссель может быть выполнен в виде пакета тонких шайб с круглыми отверстиями.
Сопло гидроусилителя выполняется в виде цилиндрического насадка или в виде капиллярного канала. Увеличение диаметра сопла приводит к увеличению расхода и быстродействия системы. Заслонка имеет плоскую форму и перемещается от воздействия на нее сигнала управления.
Гидроусилитель типа сопло-заслонка отличается простотой конструкции, надежностью в работе и быстродействием. К нему можно подводить жидкость с большим давлением питания P0. В устройстве сопло-заслонка отсутствуют трущиеся пары, что обеспечивает его высокую чувствительность. Недостатком является непроизводительный расход жидкости через сопло, низкий КПД и невысокий коэффициент усиления по мощности.
Похожие работы
... , выносными цилиндрами, разрывными муфтами, шлангам для соединения гидросистемы трактора с гидросистемой машин. 1.Назначение и общая характеристика рулевого управления автомобиля КамАЗ – 5320 и колесного трактора МТЗ – 80 с гидроусилителем Рулевое управление служит для изменения и сохранения выбранного направления движения автомобиля. Основным способом изменения направления движения является ...
... изменения направления или пуска и остановки потока рабочей жидкости в гидравлических системах станков, прессов и других стационарных машин. Гидрораспределители служат для изменения распределения потока жидкости к силовым элементам гидропривода в направлении от насосной станции, а также от силовых элементов к сливной магистрали. Такими силовыми элементами гидрораспределителей служат гидростойки, ...

... . По направлению разгрузчики ковша относительно стороны разрабатываемого штабеля погрузчики бывают с передней (фронтальные погрузчики), боковой (полуповоротные погрузчики) и задней (перекидные) разгрузчики. По виду применяемого оборудования погрузчики разделяют на универсальные и специализированные; в первом случае кроме ковша применяют сменное оборудование других видов; во втором случае вместо ...
... =0,2м После подстановки данных в формулу (2.7) получим: 2.3 Прочностной расчет рулевого механизма и рулевого привода Прочностной расчет рулевого механизма. В автомобиле Москвич 2140 в качестве рулевого механизма применяют глобоидную пару «червяк-ролик». Осевое усилие на винте определяется по формуле: ;(2.8) где: - начальный радиус винтовой линии червяка по наименьшему сечению; ...
0 комментариев