Навигация
Гидроусилитель со струйной трубкой
29808
знаков
0
таблиц
13
изображений
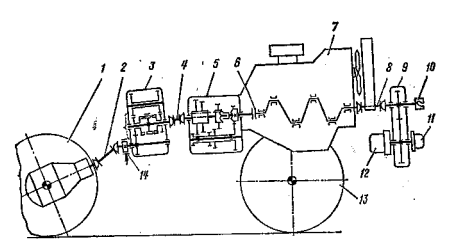
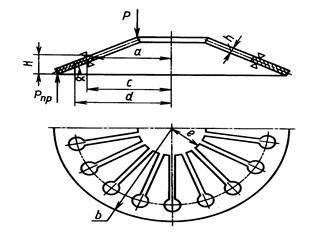
3.3 Гидроусилитель со струйной трубкой
Гидроусилитель со струйной трубкой (рис.8.) состоит из трубки 5 с коническим насадком на конце, сопловой головки 1 с двумя наклонными коническими расходящимися каналами и устройства управления. Устройство управления струйной трубкой состоит из задающего устройства 4 в виде регулируемой пружины, толкателя 6 и ограничителя 3 хода струйной трубки. Каналы сопловой головки соединены с исполнительным элементом 8 гидроусилителя. Жидкость с параметрами P0 и Q0 подается к трубке от источника питания. По трубе 2 жидкость отводится от гидроусилителя на слив.
Принцип работы гидроусилителя со струйной трубкой основан на преобразовании удельной потенциальной энергии давления в удельную кинетическую энергию струи, вытекающей из конического насадка, и последующем преобразовании этой энергии в удельную потенциальную энергию давления в каналах сопловой головки.
Гидроусилитель работает следующим образом. При отсутствии сигнала управления струйная трубка занимает нейтральное положение по отношению к отверстиям в сопловой головке. Вытекающая из насадка струя в одинаковой мере перерывает оба отверстия (рис.8., б), вследствие чего давления в каналах сопловой головки одинаковы, а выходное звено исполнительного элемента неподвижно. При подаче сигнала управления на толкатель струйная трубка смещается из нейтрального положения, равенство площадей отверстий, перекрытых струей, и равенство давлений в каналах сопловой головки нарушается. В результате выходное звено исполнительного элемента начинает перемещаться. При изменении знака сигнала управления выходное звено будет двигаться в другую сторону. Вытесняемая из исполнительного элемента жидкость попадает через канал в сопловой головке в полость 7 усилителя и далее на слив. Для того чтобы в каналы сопловой головки вместе с жидкостью не попал воздух, насадок струйной трубки делают погруженным в жидкость.
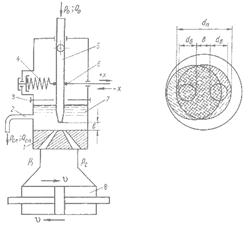
Рис.8. Гидроусилитель со струйной трубкой:
1 - сопловая головка; 2 - сливной трубопровод; 3 - ограничитель хода;
4 - задающее устройство; 5 - струйная трубка; 6 - толкатель;
7 - внутренняя полость; 8 - исполнительный элемент
3.4 Двухкаскадные усилители
Для повышения чувствительности усилителя и обеспечения одновременно увеличения мощности выходного сигнала применяют двухкаскадные устройства, первой ступенью усиления которых является обычно усилитель типа сопло- заслонка, а второй - золотник. Принципиальная схема такого устройства показана на рис.9. Междроссельная камера a этой схемы соединена с правой полостью основного распределительного золотника, плунжер 2 которого находится в равновесии под действием усилия пружины 4 и давления жидкости в этой камере. Жидкость постоянно подводится в штоковую полость b силового цилиндра, поршень которого при одновременной подаче жидкости в противоположную полость перемещается вследствие разности площадей поршня влево, и при соединении этой полости с баком - в правую сторону.
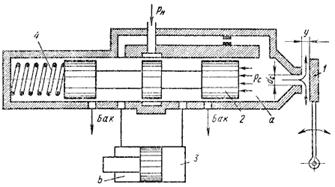
Рис.9. Двухкаскадный усилитель типа сопло-заслонка:
1 - заслонка; 2 - плунжер; 3 - силовой цилиндр; 4 - пружина
На рис.9. усилитель показана в нейтральном положении, в котором правая полость цилиндра 3 перекрыта. При смещении заслонки 1 равновесие сил, действующих на плунжер 2 золотника, нарушится, и он, смещаясь в соответствующую сторону, соединит правую полость силового цилиндра 3 либо с полостью питания (давление P Н), либо с баком. Благодаря тому, что усилие, создаваемое давлением жидкости на плунжер 2 золотника, уравновешивается пружиной 4, перемещение распределительного золотника будет пропорционально перемещению заслонки (регулируемого дросселя), в результате чего достигается приближенная пропорциональность расхода жидкости через золотник и перемещения заслонки. Следовательно, в данном случае имеет место обратная связь по давлению.

Рис.10. Двухступенчатая следящая система с обратной связью по давлению:
1 - пружина; 2 - плунжер; 3 - дроссель; 4 - клапан; 5 - заслонка
Схема применения этого распределительного устройства в следящей системе приведена на рис.10. Плунжер золотника 2 в этой схеме находится в равновесии под действием усилия пружины 1 и давления жидкости в камере a, которая соединена с линией питания через дроссель 3 и со сливом - через сверление b в штоке плунжера. Сопротивление последнего канала, а следовательно, и давление в камере a можно изменять смещением заслонки 5; при этом вследствие нарушения равновесия сил натяжения пружины и давления жидкости плунжер золотника будет следовать за заслонкой. Для повышения чувствительности давление в камере a обычно понижается с помощью клапана 4 или путем питания этой камеры от отдельного источника и, в частности, от сливной магистрали.
4. Чувствительность, точность и устойчивость гидроусилителей
Гидроусилители следящего типа должны воспроизводить с минимальной ошибкой перемещение выходного звена в соответствии с заданным перемещением входного.
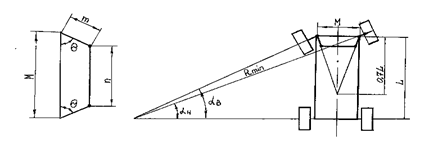
Ошибка слежения определяется в первую очередь передаточным числом кинематической цепи обратной связи, равным для схемы, изображенной на рис. З.1,
![]()
где ![]() - длина плеча рычага 7 между точками крепления золотника и тяги управления;
- длина плеча рычага 7 между точками крепления золотника и тяги управления; ![]() -длина между точками крепления штока и тяги управлении.
-длина между точками крепления штока и тяги управлении.
Важный показатель качества следящих гидроусилителей – устойчивость, под которой понимается способность системы возвращаться в состояние установившегося равновесия после прекращения действия источника нарушившего его.
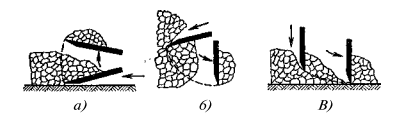
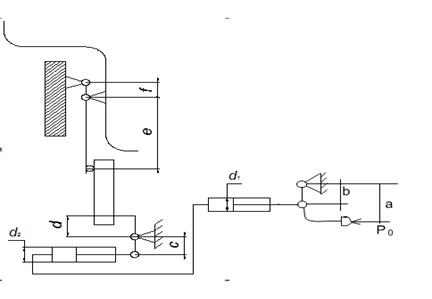
Одно из условий обеспечения устойчивости гидравлической следящей системы — жесткость с механических и гидравлических элементов. При недостаточной жесткости, в особенности при сочетании ее с высокой чувствительностыо распределительного устройства устойчивость системы неизбежно нарушается. Последнее можно видеть на (рис.11.), а, на котором показана схема упругого крепления цилиндра гидроусилителя снабженного чувствительным (с малым перекрытием) золотником. При каком-либо импульсе вызывающее смещение выходного звона гидроусилителя, при неподвижном входе цилиндр из-за наличия упругого звена (упругостью ![]() ) сместится в сторону действия импульса и повернет относительно точки b рычаг а обратной связи, сместив при этом золотник. Очевидно, при определенных значениях упругости
) сместится в сторону действия импульса и повернет относительно точки b рычаг а обратной связи, сместив при этом золотник. Очевидно, при определенных значениях упругости ![]() и интенсивности импульса золотник сможет сместиться настолько, что рабочая жидкость поступит в соответствующего полость гидродвигателя и приведет в движение его поршень, в результате чего направление движения рычага, а изменится. При этом потенциальная энергия упругого звена будет способствовать переходу золотника через равновесное положение, в результате цилиндр переместится в обратном направлении и далее процесс колебаний автоматизируется.
и интенсивности импульса золотник сможет сместиться настолько, что рабочая жидкость поступит в соответствующего полость гидродвигателя и приведет в движение его поршень, в результате чего направление движения рычага, а изменится. При этом потенциальная энергия упругого звена будет способствовать переходу золотника через равновесное положение, в результате цилиндр переместится в обратном направлении и далее процесс колебаний автоматизируется.
В реальных условиях на устойчивость гидроусилителя влияют и другие факторы, к которым относятся упругость жидкости в плоскостях системы и трубопроводов присутствие в жидкости нерастворенного воздуха, люфты в механических сочленениях, колебания гидродинамических сил золотниковом распределителе.
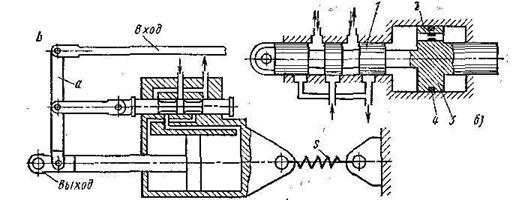
Рис.11. Схемы:
а – гидроусилитель с упругим звеном;
б - гидравлического демпфера.
Наиболее простым способом повышения устойчивости системы является увеличение перекрытия окон и уменьшение передаточного числа i. Однако этот способ снижает точность работы гидроусилителя.
Надежным способом гашения колебаний служит гидравлическое демпфирование, с помощью которого кинетическая энергия колебаний рассеивается в виде тепла. Конструктивно демпфер представляет собой цилиндр, поршень З которого (рис. 11., 6) связан с золотником 1 распределителя. В поршне выполнено дроссельное отверстие 2. При перемещениях поршня жидкость вытесняется через отверстие и радиальную щель между поршнем и цилиндром из одной полости цилиндра в другую. Сечение дроссельного отверстия 2 выбирают таким, чтобы ого сопротивление не увеличивало чрезмерно усилий при рабочих перемещениях золотника, в режиме управления, но чтобы при высокочастотных вибрационных перемещениях золотника создавалось сопротивление, способное поглотить энергию, возбуждающую колебания.
Список литературы
1. Андреев А.Ф., Барташевич Л.В., Боглан Н.В. и др. Гидропневмоавтоматика и гидропривод мобильных машин. Объемные гидро и пневмомашины и передачи. - Минск: Высшая школа, 1987. 310 с.
2. Анурьев В.И. Справочник конструктора-машиностроителя. В 3-х Т. - 5-е изд., перераб. и доп. Том 3 - М.: Машиностроение, 1980 г. - 559 с.
3. Башта Т.М., Руднев С.С., Некрасов Б.Б. и др. Гидравлика, гидромашины и гидроприводы: Учебник. 2-е изд., перераб. - М.: Машиностроение, 1982.
4. Васильченко В.А. Гидравлическое оборудование мобильных машин: Справочник. - М.: Машиностроение, 1983. - 301 с., ил.
5. Кононов А.А., Ермашонок С.М. Гидравлика. Гидравлические машины и гидроприводы СДМ: Методические указания к выполнению курсовой работы. - Братск: ГОУ ВПО "БрГТУ", 2003. - 61 с.
Похожие работы
... , выносными цилиндрами, разрывными муфтами, шлангам для соединения гидросистемы трактора с гидросистемой машин. 1.Назначение и общая характеристика рулевого управления автомобиля КамАЗ – 5320 и колесного трактора МТЗ – 80 с гидроусилителем Рулевое управление служит для изменения и сохранения выбранного направления движения автомобиля. Основным способом изменения направления движения является ...
... изменения направления или пуска и остановки потока рабочей жидкости в гидравлических системах станков, прессов и других стационарных машин. Гидрораспределители служат для изменения распределения потока жидкости к силовым элементам гидропривода в направлении от насосной станции, а также от силовых элементов к сливной магистрали. Такими силовыми элементами гидрораспределителей служат гидростойки, ...

... . По направлению разгрузчики ковша относительно стороны разрабатываемого штабеля погрузчики бывают с передней (фронтальные погрузчики), боковой (полуповоротные погрузчики) и задней (перекидные) разгрузчики. По виду применяемого оборудования погрузчики разделяют на универсальные и специализированные; в первом случае кроме ковша применяют сменное оборудование других видов; во втором случае вместо ...
... =0,2м После подстановки данных в формулу (2.7) получим: 2.3 Прочностной расчет рулевого механизма и рулевого привода Прочностной расчет рулевого механизма. В автомобиле Москвич 2140 в качестве рулевого механизма применяют глобоидную пару «червяк-ролик». Осевое усилие на винте определяется по формуле: ;(2.8) где: - начальный радиус винтовой линии червяка по наименьшему сечению; ...
0 комментариев