Навигация
КИНИМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
16711
знаков
10
таблиц
2
изображения
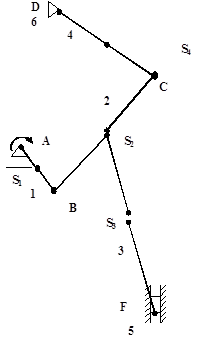
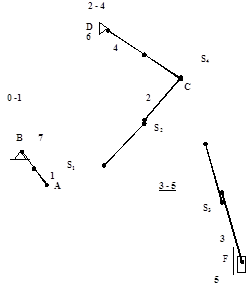
1.2 КИНИМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
1.2.1 ПОСТРОЕНИЕ ПЛАНА СКОРОСТЕЙ
Определение скоростей начинаем с ведущего звена, для которого известна ω и LАО1.
VA=ωАВ*LАО1; (1.2.1),
Где, ωАО1 –угловая скорость звена АВ, c-1;
ωАО1 =π*nАО1/30; (1.2.2),
ωАО1 =![]() рад/с.
рад/с.
VA=28.26 * 0.04 = 1.13м/с.
где, nАО1 – частота вращения звена АО1, об/мин.
В произвольной точке плоскости чертежа выбираем полюс плана скоростей. Из полюса в направлении вращения звена АО1 проводим вектор произвольной длины, соответствующий скорости точки A. Определяем масштаб плана скоростей по формуле
μv=VA/Pva,((м/с)/мм); (1.2.3),
μv=![]()
![]()
![]() =0,01
=0,01 ![]()
По принадлежности точки В звену АВ составляем векторное уравнение:
VВ=VА+VВА , (1.2.4);
По принадлежности точки В к опоре О2 составляем векторное уравнение:
VВ=VO2+VВO2 (1.2.5).
В уравнении (1.2.9) VА – полностью определено, а о втором слагаемом известно лишь то, что линия действия этого вектора перпендикулярна AВ.
В уравнении (1.2.10) VO2 равно нулю, а о втором слагаемом известно лишь то, что линия действия этого вектора перпендикулярна ВО2 . Точкой пересечения этих двух линий будет точка В.
VВ = Pvв*µv , (1.2.6);
VВ =0.01 *82=0.82м/с (1.2.7),
Для нахождения скорости точки S2 на плане, воспользуемся соотношением; т.к. точка S2 лежит на звене AB, содержащим точку S2, то справедливо соотношение:
 , (1.2.8);
, (1.2.8);
где lAB – длина плеча AB по условию;
lAS2 – длина плеча AS2 по условию;
ab, as2 – длина соответствующих отрезков на плане.
![]() , as2 =
, as2 = ![]() =40.5мм.
=40.5мм.
VS2=Pvs2*µv , (1.2.9);
VS2 = 83 * 0,01 = 0.83м/с.
Звено ВО2 выполняет вращятельное движение вокруг точки О2. Точка Е пренодлежит этому звену и лежит на середине зтого звена .Скорость точки Е можна найти так:
VЕ=Pvе*µv(1.2.10);
VЕ=41*0.01=0.41м/с.
Для нахождения скорости точки S3 на плане, воспользуемся соотношением; т.к. точка S3 лежит на звене BО2, содержащим точку S3, то справедливо соотношение:
 , (1.2.11);
, (1.2.11);
где lО2B – длина плеча О2B по условию;
lО2S2 – длина плеча О2S2 по условию;
Факт принадлежности точки D звену ED дает векторное уравнение:
VD=VE+VDE(1.2.12);
В уравнении (1.2.9) VE – полностью определено, а о втором слагаемом известно лишь то, что линия действия этого вектора перпендикулярна DE.
Факт принадлежности точки D ползуну О3 дает векторное уравнение:
VD=VО3+VDО3 (1.2.13);
В уравнении (1.2.10) VO3 равно нулю, а о втором слагаемом известно лишь то, что линия действия этого вектора перпендикулярна ED . Точкой пересечения этих двух линий будет точка D.
VD= Pvd*µv , (1.2.14);
VD =41*0.01=0.41м/с
Далее находим скорости всех звеньев:
VBA=ba*µv , (1.2.15);
VBA=54*0,01 = 0.54 м/с ;
VAO1=ao1*µv , (1.2.16);
VAO1 = 100*0,01 = 1 м/с ;
VBO2=bo2*µv , (1.2.17);
VBO2=82*0,01 = 0.82м/с;
VDE=0. (1.2.18);
и скорости центров масс звеньев:
VS1=pvs1*µv, (1.2.19);
VS1=50*0.01=0.5м/с ;
VS2=pvs2*µv , (1.2.20);
VS2=83*0.01= 0.83 м/с;
VS3=pvs3*µv , (1.2.21);
VS3=52*0.01 = 0.52 м/с ;
VS4=0. (1.2.22);
Определяем угловые скорости звеньев механизма.
При помощи плана скоростей можно определить угловые скорости звеньев механизма.
Угловая скорость звена AB:
 (1.2.23);
(1.2.23);
где VAB скорость движения точки B относительно точки A:
ωAB= ![]()
Похожие работы
... длину вектора и переведем ее обратно: = 79 мм = 2370 Н 2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Такими внешними силами являются силы инерции , моменты инерции и реакции в кинематических парах R. Под ...
... напряжений; 4) определить размеры детали и округлить их до ближайших стандартных, согласно которым будет производится подбор сечений. 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Проектный расчет на прочность будем производить для группы Ассура 2-4 данного ...
... 74 R05 24.4 0,005 G4 14,7 Fi4 7.02 R04 7.6 G5 24,5 Fi5 8.125 Fур 0,197 2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими ...
... H 14 23,4 22 R, H 14 24,2 11,8 1 22,2 2. Расчет элементов кинематических пар на прочность. 2.1. Определение внешних сил, действующих на звенья. В результате динамического анализа плоского рычажного механизма определены внешние силы, действующие на звенья и кинематические пары. Такими внешними усилиями являются силы инерции F , моменты инерции M , а также реакции ...
0 комментариев