Навигация
13.5 рад/с;
13.5 27.3 0
Аналогично для остальных звеньев:
 (1.2.24);
(1.2.24);
ωBO2 =![]() 27.3 рад/с;
27.3 рад/с;
 (1.2.25);
(1.2.25);
ωEF![]() 0.
0.
Скорости всех звеньев сводим в таблицу.
| VA, м/с | VB,м/с | VD,м/с | VE,м/с | VO2,м/с | VAO1, м/с | VO1,м/с | VAB,м/с | VBO,м/с | VED, м/с | VS1,м/с | VS2,м/с | VS3,м/с |
| |
| 1.13 | 0.82 | 0.41 | 0.41 | 0 | 1 | 0 | 0.54 | 0.82 | 0 | 0.5 | 0.83 | 0.52 | 0 0 |
Таблица 1.2.1. –Скорости всех звеньев механизма
Угловые скорости звеньев сведем в таблицу.
| ωAB,рад/с | ωBO2, рад/с | ωDE, рад/с |
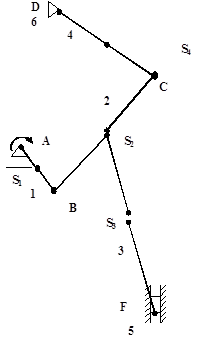
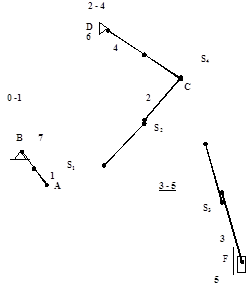
1.2.2 ПОСТРОЕНИЕ ПЛАНА УСКОРЕНИЙ.
При построении ускорений точек и звеньев механизма тоже используем метод планов.
Построение начинаем с ведущего звена, для которого ω = const. В связи с этим
![]()
 (1.2.23);
(1.2.23);
![]() 1/0.04=25 м/с2
1/0.04=25 м/с2
вектор ускорения т.A направлен вдоль звена AO1 от точки A к центру вращения.
На поле чертежа произвольно выбираем полюс. От полюса вдоль звена AO1 проводим вектор скорости т.A произвольной длины. Вычисляем масштабный коэффициент
µa=![]() (1.2.24);
(1.2.24);
µa= ![]() =0.2
=0.2 ![]()
Ускорение точки C находим из условия принадлежности этой точки двум звеньям AC и стойке, используя теорему о разложении ускорений.
По принадлежности С![]() к звену AС записываем:
к звену AС записываем:
![]() (1.2.25);
(1.2.25);
В уравнении (1.2.25) ![]() известно полностью,
известно полностью, ![]() направлено от точки C к точке A вдоль движения поршня и равно:
направлено от точки C к точке A вдоль движения поршня и равно:
 (1.2.26);
(1.2.26);
![]() (0.02*68)2/0.08=23.12 м/с2
(0.02*68)2/0.08=23.12 м/с2
Далее определяем длину этого отрезка на плане:
 (1.2.27);
(1.2.27);
nCA =23.12/0.9=26 мм.
По принадлежности точки C к звену DC составляем векторное уравнение:
![]() (1.2.28);
(1.2.28);
Значение ![]() определяем аналогично
определяем аналогично ![]()
 (1.2.29),
(1.2.29),
Далее определяем длину этого отрезка на плане:
 (1.2.30);
(1.2.30);
nCD = 42.6/0.9 = 47 мм.
 (1.2.31),
(1.2.31),
Далее определяем длину этого отрезка на плане:
 (1.2.32);
(1.2.32);
nEF = 23.18/0.9=26мм.
Для нахождения ускорения точки E на плане, воспользуемся соотношением. Т.к. точка E лежит на звене AC, то справедливо соотношение:
 (1.2.33);
(1.2.33);

где lAE– длина плеча AE по условию;
lAC – длина плеча AC по условию;
ae, ac – длина соответствующих отрезков на плане.
![]() (1.2.34);
(1.2.34);
![]()
Теперь находим ускорения центров масс звеньев
![]() (1.2.35);
(1.2.35);
![]()
![]() (1.2.36);
(1.2.36);
![]()
![]() (1.2.37);
(1.2.37);
![]()
![]() (1.2.38);
(1.2.38);
![]()
Полученные данные сведем в таблицу.
| Aa м/с2 |
|
| aC, м/с2 |
|
|
|
|
| aF, м/с2 |
| 153.8 | 23.12 | 18 | 90 | 42.6 | 85.5 | 108 | 23.18 | 18.9 | 36 |
|
|
| aS3, м/с2 | aS4, м/с2 | aS5, м/с2 |
| 85.5 | 110.7 | 45 | 98.1 | 20 |
Таблица 1.2.3 – Ускорения точек и центров масс звеньев
Определение угловых ускорений звеньев механизма.
 (1.2.39);
(1.2.39);
![]()
 (1.2.40);
(1.2.40);
![]()
 (1.2.41);
(1.2.41);
![]()
Угловые ускорения звеньев сведем в таблицу
|
|
|
|
|
| 0 | 225 | 1710 | 180 |
Таблица 1.2.4. – Угловые ускорения звеньев.
Похожие работы
... длину вектора и переведем ее обратно: = 79 мм = 2370 Н 2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Такими внешними силами являются силы инерции , моменты инерции и реакции в кинематических парах R. Под ...
... напряжений; 4) определить размеры детали и округлить их до ближайших стандартных, согласно которым будет производится подбор сечений. 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Проектный расчет на прочность будем производить для группы Ассура 2-4 данного ...
... 74 R05 24.4 0,005 G4 14,7 Fi4 7.02 R04 7.6 G5 24,5 Fi5 8.125 Fур 0,197 2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими ...
... H 14 23,4 22 R, H 14 24,2 11,8 1 22,2 2. Расчет элементов кинематических пар на прочность. 2.1. Определение внешних сил, действующих на звенья. В результате динамического анализа плоского рычажного механизма определены внешние силы, действующие на звенья и кинематические пары. Такими внешними усилиями являются силы инерции F , моменты инерции M , а также реакции ...
0 комментариев