Плотность тока в обмотке статора (окончательно) по (8.27)
Магнитное напряжение воздушного зазора по (8.103)
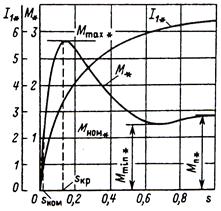
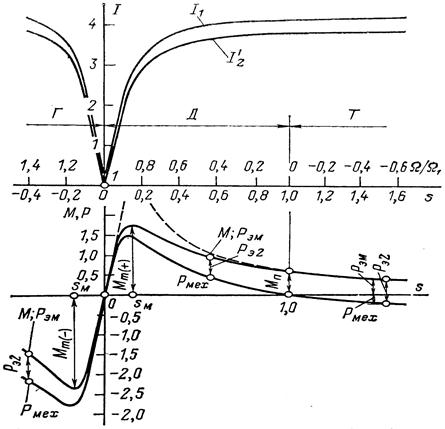
Рассчитываем рабочие характеристики для скольжений s = 0,005; 0.01; 0.015; 0.02; 0.025; 0.03; 0.035; 0.04. Результаты расчета сведены в табл. 1
Пусковые параметры по (8,277) и (8,278)
Перепад температуры в изоляции пазовой части обмотки статора по (8.331)
Навигация
Магнитное напряжение воздушного зазора по (8.103)
Асинхронный двигатель
39328
знаков
6
таблиц
31
изображение
35. Магнитное напряжение воздушного зазора по (8.103)
36. 
Магнитное напряжение зубцовой зоны статора по (8.104)
Fz1 = 2hz1Hz1 = 2·34.2·10ˉ³·2070=141.6 A,
где hz1 = hп1 = 34.2 мм (см. п. 20 расчета);
расчетная индукция в зубцах по (8.105)
![]()
(bz1 = 6.7 мм по п. 19 расчета; kс1 = 0,97 по табл. 8.11). Так как B’z1 > 1,8 Тл, необходимо учесть ответвление потока в паз и найти действительную индукцию в зубце Bz1. Коэффициент kпх по высоте hzx = 0.5hz по (4.33)
 |
по (4.32)
![]()
Принимаем Bz1 = 1,9 Тл, проверяем соотношением Bz1 и B’z1:
1.9 = 1.9 – 1.256·10ˉ³·2070·1.74 = 1.9,
где для Bz1 = 1.9 Тл по табл. П1.7 Hz1 = 2070 A/м.
37. Магнитное напряжение зубцовой зоны ротора по (8.108)
Fz2 = 2hz2Hz2 = 2·0.0325·1520 = 98.8 A
[при зубцах по рис. 8.40, б из табл. 8.18 hz2 = hп2 – 0.1b2 = 32.5 мм;
индукция в зубце по (8.109)
![]()
по табл. П1.7 для Bz2 = 1.8 Тл находим Hz2 = 1520 А/м].
38. Коэффициент насыщения зубцовой зоны по (8.115)
![]()
39. Магнитное напряжение ярма статора по (8.116)
Fa = LaHa = 0.324·750 = 243 A
[по (8.119)
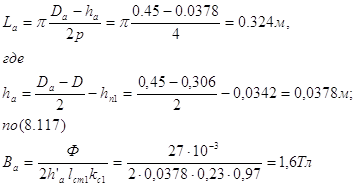
(при отсутствии радиальных вентиляционных каналов в статоре h’a = ha = 0.0378 м) для Ва=1,6 Тл по табл. П1.6 находим Ha=750 А/м].
40. Магнитное напряжение ярма ротора по (8.121)
Fj = LjHj = 0.134·164 = 22 A
[по (8.127)
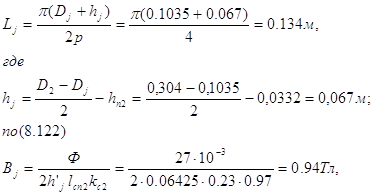 |
где по (8.124) для четырехполюсных машин при 0,75(0,5D2 – hп2) < Dj

для Bj = 0.94 Тл по табл. П1.6 находим Hj = 164 А/м].
41. Магнитное напряжение на пару полюсов по (8.128)
Fц = Fδ + Fz1 + Fz2 + Fa + Fj = 1602.4 A.
42. Коэффициент насыщения магнитной цепи по (8.129)
kμ = Fц/Fδ = 1.46.
43. Намагничивающий ток по (8.130)

Относительное значение по (8.131)
Iμ* = Iμ/Iном = 20/93,3 = 0,22.
Параметры рабочего режима.
44. Активное сопротивление обмотки статора по (8.132)

(для класса нагревостойкости изоляции F расчетная температура vрасч = 115 ˚С, для медных проводников ρ115 = 10ˉ³/41 Ом·м).
Длина проводников фазы обмотки по (8.134)
L1 = lср1w1 = 1.202·65 = 78.13 м;
по (8.135) lср1 = 2(lп1 + lл1) = 2(0,23 + 0,371) = 1,202 м; lп1 = l1 =0,23 м; по (8.136) lл1 = Кл·bкт +2В = 1,3·0,27 + 2·0,01 = 0,371 м, где В = 0,01 м; по табл. 8.21 Кл = 1,3;
по (8.138)
![]()
Длина вылета лобовой части катушки по (8.140)
lвыл = kвыл·bкт + В = 0,4·0,27 + 0,01 = 0,118 м,
где по табл. 8.21 Квыл = 0,4.
Относительное значение
![]()
45. Активное сопротивление фазы обмотки ротора по (8.168)
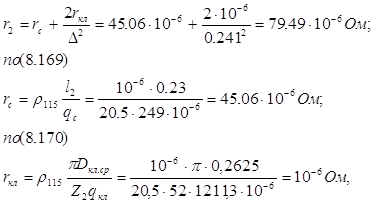
где для литой алюминиевой обмотки ротора ρ115 = 10ˉ³/20,5 Ом·м.
 |
Приводим r2 к числу витков обмотки статора по (8.172), (8.173):
Относительное значение
46. ![]()
Индуктивное сопротивление фазы обмотки статора по (8.152)

где по табл. 8.24 (см. рис. 8.50, е)

где h2 = hп.к – 2bиз = 30,2 - 2·0,4 = 29,4 мм; b1 = 9,7 мм; hк = 0,5(b1 – bш) = 0,5(9,7 – 3,7) = 3 мм; h1 = 0 (проводники закреплены пазовой крышкой); kβ = k’β = 1; l’δ = lδ = 0.23 м по (8.154);
по (8.159)
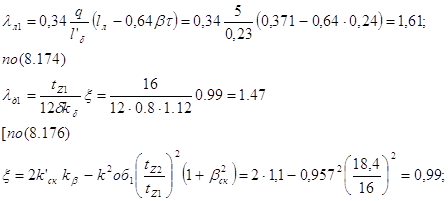
для βск = 0 и tz2/tz1 = 1.15 по рис. 8.51, д k’ск = 1,1].
Относительное значение
47. ![]()
Индуктивное сопротивление фазы обмотки ротора по (8.177)

где по табл. 8.25 (см. рис. 8.52, а, ж)

где (см. рис. 8.52, а, ж)
h0 = h1 + 0.4b2 = 26.68 мм; b1 = 9.6 мм; bш = 1,5 мм; hш = 0,7 мм; h’ш = 0,3 мм; qс = 249 мм²;
по (8.178)
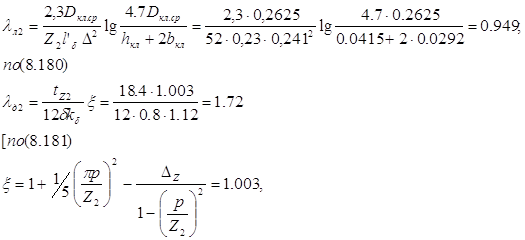
так как при закрытых пазах Δz ≈ 0].
Приводим x2 к числу витков статора по (8.172) и (8.183):

Относительное значение
![]()
Расчет потерь.
48. Потери в стали основные по (8.187)

[p1.0/50 = 2.5 Вт/кг для стали 2013 по табл. 8.26;
по (8.188)
ma = π(Da – ha)halст1kс1υc = π(0.45 - 0.0378)0.0378·0.23·0.97·7.8·10³ = 85.2 кг;
по (8.189)
mz1 = hz1bz1срZ1lст1kс1υc = 0,0342·0,0067·60·0,23·0,97·7,8·10³ = 23,92 кг;
kда = 1,6; kдz = 1.8 (см. §8.10)].
49. Поверхностные потери в роторе по (8.194)
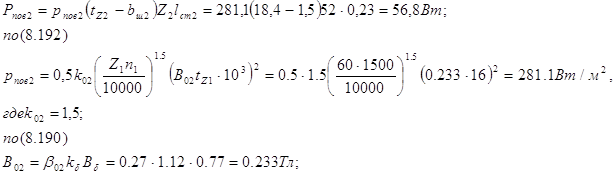
для bш/δ = 3,7/0,8 = 4,625 по рис. 8.53 β02 = 0,27.
50. Пульсационные потери в зубцах ротора по (8.200)
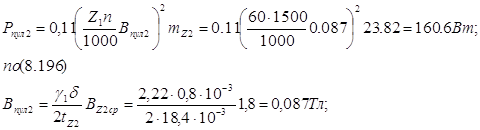
Bz2ср = 1,8 Тл из п. 37 расчета; γ1 = 2,22 из п. 35 расчета;
по (8.201)
mz2 = Z2hz2bz2срlст2kc2γc = 52·0.0325·0.0081·0.23·0.97·7800 = 23.82 кг;
hz2 = 32,5 мм из п. 37 расчета; bz2 = 8,1 мм из п. 32 расчета.
51. Сумма добавочных потерь в стали по (8.202)
Рст.доб = Рпов1 + Рпул1 + Рпов2 + Рпул2 = 56,8 + 160,6 = 217,4 Вт.
52. Полные потери в стали по (8.203)
Рст = Рст.осн + Рст.доб = 1261 + 217,4 = 1487,4 Вт.
53. Механические потери по (8.210)
Рмех = Кт(n/10)²D¹a = 0.715(1500/10)²0.45¹ = 660 Вт
(для двигателей с 2р = 4 коэффициент Кт = 1,3(1 – Dа) = 0,715).
54. Холостой ход двигателя:
по (8.217)

Расчет рабочих характеристик.
55. Параметры:
по (8.184)
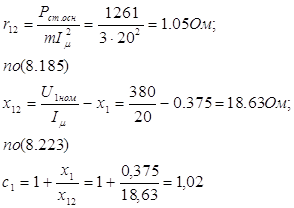
[используем приближенную формулу, так как |γ| < 1˚:
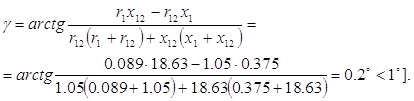
Активная составляющая тока синхронного холостого хода:
по (8.226)
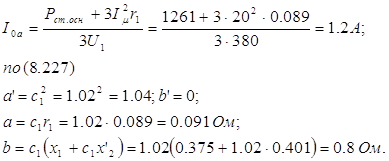
Потери, не изменяющиеся при изменении скольжения,
Рст + Рмех = 1478,4 + 660 = 2138,4 Вт.
Похожие работы
... из строя эл. двигателя. вспомо- гатель-ная. Защитные крышки, кожухи, эмали, лаки. Конструк- ционные материалы, краски, лаки, эмали. Таблица 7.1. СФА АД Система асинхронного двигателя для структурно-функционального анализа представлена на рис. 7.2. Рис. 7.2. Схема для СФА Матрица механической связи основных элементов структуры асинхронного электродвигателя приведена ниже в ...
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
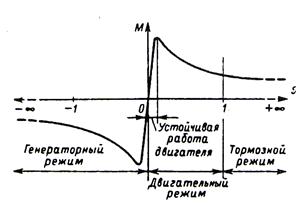
... , потребляемой из сети, также возрастает с ростом мощности и частоты вращения двигателей; при мощности более 1 кВт он составляет 0,7—0,9; в микродвигателях 0,3—0,7. Общие сведения о режимах работы асинхронного двигателя. В двигательном режиме разница частот вращения ротора и поля статора в большинстве случаев невелика и составляет лишь несколько процентов. Поэтому частоту вращения ротора ...
0 комментариев