Вимоги до характеристик вимірювача шуму
Вимоги до сучасних вимірювачів шуму
Вибір та обґрунтування технічних рішень
Розрахунок підсилювача
Можливості оператора
Розрахунок надійності
Помилки вимірювання шумових характеристик
Помилки, пов’язані з частотною характеристикою чутливості вимірювача шуму
Помилки, пов'язані з чутливістю селективного вимірювального тракту
Помилки, пов’язані з характеристикою детектора
Помилки, пов’язані з акустичними завадами
Помилки, пов’язані з акустичними завадами
Investigator TM з пакетами програмного забезпечення для
Обгрунтування системи параметрів виробу і визначення відносних показників якості
Оцінка попарного пріоритету показників
Оцінка конкурентоспроможності виробу
Калькуляція собівартості
Витрати на покупні вироби й напівфабрикати
Комерційні витрати
Нижня межа ціни
Електромагнітні та електростатичні поля ВДТПЕОМ
Навигация
Можливості оператора
Измеритель шума
128066
знаков
34
таблицы
116
изображений
2.4. Можливості оператора
Для приладу вимірювання шуму потрібен оператор, людина, що буде знімати та аналізувати отриманні данні. Утворена система з людини та приладу (машини) розглядається, як загальне ціле.
Будь-яка система людина-машина (далі СЛМ) покликана задовольняти певні потреби людини або суспільства. Для цього вона повинна мати низку властивостей, які закладаються під час її проектування і реалізуються у процесі її експлуатації. Згідно з державним стандартом ДЕСТ 2.116-71, властивість СЛМ — це об'єктивна особливість, яка виявляється в процесі експлуатації. Кількісна характеристика певної властивості системи має назву показника якості СЛМ, тобто кожна СЛМ має нескінченну множину властивостей, що визначають її якість. Під якістю розуміють сукупність властивостей, які характеризують ступінь придатності системи для використання її за призначенням, тобто її ефективність.
Нині поряд з основними показниками розробки та експлуатації технічних систем (продуктивність, надійність, економічність) різко зросло значення таких показників, як ергономічність, екологічність, естетичність, котрі забезпечують досягнення соціальної ефективності нової техніки. Використання досягнень інженерної психології при проектуванні техніки й умов її функціонування сприяє підвищенню ефективності і якості праці, зручності експлуатації та обслуговування техніки, скороченню термінів її освоєння, поліпшенню умов праці, економії витрат фізичної і нервово-психічної енергії працюючої людини, підтриманню її високої працездатності. Участь людини-оператора у функціонуванні СТЛС зумовлює наявність специфічних властивостей, які визначають інтегральні характеристики зв'язку людини і машини в конкретних умовах зовнішнього середовища. Сукупність цих специфічних властивостей, котрі забезпечують можливість динамічної взаємодії людини з технічними засобами з метою виконання системою поставлених завдань у заданих умовах експлуатації, можна назвати ергономічністю системи. Ця інтегральна характеристика забезпечується певними інженерно-психологічними властивостями - системи, зокрема швидкодією, точністю, надійністю і напруженістю діяльності оператора.
Швидкодія, характеризується, часом проходження. Інформації до, замкненому колу «людина - машина», а точніше, часом функціонування СЛМ до досягнення певної мети, тобто тривалістю циклу регулювання:

 Де
Де
t — час обробки інформації в і-й ланці СЛМ;
k - кількість ланок СЛМ, в ролі яких виступають і технічні системи, і оператори.
Наприклад: t=1с, а ланок 4, тоді маємо Tu= 14
Цикл регулювання — це проміжок часу, за який виникає відхилення у системі і відбувається його ліквідування, тобто система стає такою, як задано програмою. Розглянемо цю характеристику на прикладі простої одно-контурної схеми регулювання.
Припустимо, що оператор повинен витримувати технічні параметри системи в заданих межах. Один із цих технічних параметрів, незалежно від дій оператора, почав відхилятися від заданого значення n1, до значення n0 котре розглядається як порушення в роботі системи. Інформація про це порушення з'явиться на приладах за час t1, який зумовлений інертністю системи вимірювання. Для її знаходження, сприйняття, обробки і прийняття рішення операторові необхідний певний, час tг Крім цього, для виконання певних керуючих дій теж потрібен певний час —t3, а для їхнього тривання в системі, з метою приведення цього параметра в норму, також необхідний певний час — t4. Таким чином, проходження
інформації по контуру управління визначається сумарним часом затримки інформації в окремих складових системи «людина — машина». Час проходження інформації; технічних частинах СЛМ (![]() і
і ![]() ) зумовлений технічними характеристиками системи. Час, необхідний на сприйняття інформації, прийняття рішень і виконання керуючих дій (
) зумовлений технічними характеристиками системи. Час, необхідний на сприйняття інформації, прийняття рішень і виконання керуючих дій (![]() і
і ![]() ), залежить від самого оператора, цілей та умов його діяльності:
), залежить від самого оператора, цілей та умов його діяльності:
![]()
Наприклад ![]() =
=![]() =0,5с, t3=2с, t2=2,5с
=0,5с, t3=2с, t2=2,5с ![]() =0,5+0,5+2+2,5=5,5с
=0,5+0,5+2+2,5=5,5с
Таким чином, оператор керує системою і регулює її ро-відповідно до певної програми, яка має часові характеристики. Виконання цієї програми залежить від технічних характеристик системи, які зумовлюють зовнішні,  технічні, часові обмеження. Крім цього, людині-оператору притаманні свої
внутрішні, психофізіологічні властивості, які теж зумовлюють певні часові обмеження. При цьому ці внутрішні обмеження можуть змінюватися залежно від функціонального стану оператора. Ось чому досягнення однієї і тієї ж мети відбувається по-різному не тільки у різних операторів, але і в одного й того ж.
технічні, часові обмеження. Крім цього, людині-оператору притаманні свої
внутрішні, психофізіологічні властивості, які теж зумовлюють певні часові обмеження. При цьому ці внутрішні обмеження можуть змінюватися залежно від функціонального стану оператора. Ось чому досягнення однієї і тієї ж мети відбувається по-різному не тільки у різних операторів, але і в одного й того ж.
Та в конкретних умовах діяльності певний оператор може не відчуваючи напруження, витратити мінімальний час на знаходження, сприйняття, переробку інформації і прийняття рішень (![]() ), а також на введення цього рішення у систему через керуючі дії (
), а також на введення цього рішення у систему через керуючі дії (![]() ). За таких умов час циклу регулювання буде мінімальним:
). За таких умов час циклу регулювання буде мінімальним:
![]()
Ящо витрачати на ![]() та на
та на ![]() хоча б по 5 сек, то
хоча б по 5 сек, то ![]() буде дорівнювати 11 секунд. Ця характеристика є показником внутрішніх обмежень оператора, його швидкісних можливостей, які залежать від швидкості перебігу нервових процесів.
буде дорівнювати 11 секунд. Ця характеристика є показником внутрішніх обмежень оператора, його швидкісних можливостей, які залежать від швидкості перебігу нервових процесів.
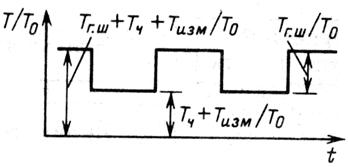
Тепер звернемо увагу на зовнішні обмеження, які необхідно враховувати в діяльності оператора. Розглянемо той самий приклад, але припустимо, що оператор, сприйнявши відхилення параметра п за час ![]() , не реагував на нього, і воно (відхилення параметра п) наростало й надалі. Характер відхилення параметра п наведений на рис. 2.4. Характер залежності циклу регулювання (
, не реагував на нього, і воно (відхилення параметра п) наростало й надалі. Характер відхилення параметра п наведений на рис. 2.4. Характер залежності циклу регулювання (![]() ) від параметра n
) від параметра n


Рис. 2.8
Гранично допустиме відхилення даного параметра в системі —![]() , збільшення якого призводить до відмови системи, як бачимо з рис. 2. Останній момент, коли ще оператор може втрутитися у функціонування системи, є час
, збільшення якого призводить до відмови системи, як бачимо з рис. 2. Останній момент, коли ще оператор може втрутитися у функціонування системи, є час ![]() , за умови, що командні дії оператор введе за час
, за умови, що командні дії оператор введе за час ![]() , і вони пройдуть у системі за час
, і вони пройдуть у системі за час ![]() . Виходячи з цього, оператор у наведеному прикладі має певний вільний час понад мінімальний, який був названий резервним:
. Виходячи з цього, оператор у наведеному прикладі має певний вільний час понад мінімальний, який був названий резервним:
![]()
Слід зауважити, що поняття резервного часу введене умовно, оскільки в реальній діяльності виникають даткові затримки інформації, які збільшують час її обробки і реагування на неї. До того ж резервний час, так би мовити, вміщує або враховує індивідуальні психофізіологічні розбіжності між операторами. Для оцінки рівня технічних обмежень у часі використовують поняття ліміту і дефіциту часу. Говорячи про «ліміт», мають на увазі певні зовнішні обмеження у часі. Термін «дефіцит» уживається тоді, коли відведений оператору час менший за мінімально необхідний для вирішення задачі. Але за рахунок саморегуляції деякі оператори можуть підвищити свої швидкісні можливості і укластися у відведений час. Правда, тут постає питання: якою «ціною» це їм вдається?
 З іншого боку, критерієм швидкодії є час вирішення задачі, тобто час від моменту реагування оператора на надходження інформації до моменту закінчення керуючих дій оператора. Звичайно, цей час прямо пропорційний кількості інформації, що переробляється оператором:
З іншого боку, критерієм швидкодії є час вирішення задачі, тобто час від моменту реагування оператора на надходження інформації до моменту закінчення керуючих дій оператора. Звичайно, цей час прямо пропорційний кількості інформації, що переробляється оператором:
![]()
де а і b — константи, що мають певний фізичний зміст: а — прихований час реакції, який залежить від модальності сигналу і приблизно дорівнює 0,2с; b — величина, яка зворотна швидкості переробки інформації оператором і дорівнює 0,15/0,35 с/біт; H — кількість інформації в бітах.
У разі надходження декількох сигналів оператор приступає до обробки певного сигналу через деякий час, тобто сигнал чекає своєї обробки, на що витрачається певний час — tчек. У цьому випадку швидкодія переробки інформації оператором характеризується двома складовими:

![]()
а тривалість циклу регулювання становить:
 ,
,
Де ![]() - час затримки інформації у i-й ланці машини, а n - кількість ланок машини..
- час затримки інформації у i-й ланці машини, а n - кількість ланок машини..
При заданому Тп і відомих ![]() (паспортні дані технічних пристроїв) від оператора вимагається така швидкодія:
(паспортні дані технічних пристроїв) від оператора вимагається така швидкодія:
З іншого боку ![]() можна визначити як суму часу кожного з етапів переробки інформації, прийняття рішень і здійснення керуючих дій — t2 і t3.
можна визначити як суму часу кожного з етапів переробки інформації, прийняття рішень і здійснення керуючих дій — t2 і t3.
Таким чином, часові характеристики діяльності оператора в інженерній психології можуть застосовуватись як:
показник часових обмежень;
показник швидкості перебігу нервових процесів;
характеристика процесу навчання;
характеристика узгодженості складових СЛМ.
Точність роботи оператора — це відповідність його дій заданій програмі. Програма роботи може задаватися у вигляді послідовності дій і у вигляді результату, якого потрібно досягти. Але в процесі діяльності операторові доводиться враховувати численні зміни, які доповнюють і уточнюють програму, потребують нових критеріїв оцінок. Завдяки цьому в оператора складається досить конкретна система уявлень про показники діяльності системи, яка формує певний образ-еталон, згідно з яким він організовує свою діяльність і підтримує необхідну точність у процесі реалізації прогрими.
У реальному процесі управління, хоч би як ідеально він був організований, результати дій оператора, а також показники роботи техніки неодмінно мають деякі відхилення від заданих програмних значень, які називають похибками. Поки похибка перебуває в допустимих межах, визначених правилами, інструкціями, програмами тощо, це нормальне явище, і воно принципово не впливає на функціонування системи в цілому. Коли ж похибка перевищує встановлені значення, то це вже порушує нормальну роботу системи, і її кваліфікують як помилку.
У випадках, коли похибка в роботі оператора досягає значення, за якого неможлива подальша, робота оператора або. показники .його діяльності не-можуть забезпечити досягнення поставленої мети, її кваліфікують-як  відмову людини-оператора. Точність системи прийнято; характеризувати величиною, зворотною до її найбільш допустимої похибки.
відмову людини-оператора. Точність системи прийнято; характеризувати величиною, зворотною до її найбільш допустимої похибки.
Коли мова йде про систему «людина — машина» то окрема оцінка точності оператора і техніки без урахування їхнього взаємозв'язку буде неповною. Оператор під час керування системою впливає на весь комплекс її параметрів, які, своєю чергою, теж пов'язані між собою, і тому вплив на один із параметрів системи може відобразитися на точності регулювання інших. До того ж похибка в регулюванні різних систем, вимірюється різними одиницями. Ось чому загальна похибка системи має враховувати питому вагу кожної з її складових. Такий підхід дає змогу оцінювати вплив окремих систем на загальну точність її регулювання, прогнозувати процес накопичення в окремих складових системи, що сприяє розробці цілеспрямованих заходів з підвищення точності функціонування СЛМ.
Усі похибки операторів і приладів поділяють на систематичні та випадкові.
Систематичні похибки виникають у разі впливу постійно і однаково діючих факторів, які за значної кількості вимірювань багаторазово повторюються. В оператора вони з'являються через такі причини:
невиконання правил вимірювання;
невиконання правил оцінки результатів;
індивідуальні недоліки, пов'язані з професійними і особистісними якостями.
Систематичні похибки оператора можна зменшити або зовсім ліквідувати шляхом його навчання, створення спеціальних таблиць поправок або внесення певних змін у конструкцію самих приладів.
Випадкові похибки спричинені впливом факторів нестабільної дії, появу яких складно передбачити. Для операторів це, як правило, — довкілля або їх фізичний чи психічний стан. Випадкові похибки людини і техніки ліквідувати неможливо, втім, їх можна зменшити; забезпечивши належну  підготовку оператора, сприятливі умови його діяльності, технічне вдосконалення приладів.
підготовку оператора, сприятливі умови його діяльності, технічне вдосконалення приладів.
Усі похибки вимірювання в оператора або технічних приладів; незалежно від природи їхнього виникнення, поділяють на абсолютні, відносні і приведені,
Абсолютна похибка — це різниця між виміряною і реальною величинами:
Δa = ах - а.
Вона виражається у тих самих одиницях, що і вимірювана величина, і не характеризує точність самого вимірювання.
Відносна похибка — це відношення абсолютної похибки до дійсного значення параметра, виражене у відсотках:
![]()
Похожие работы


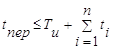
... должен быть снижен на 3…5 дБ против допустимого по нормам: ,дБ (2.5.13) где Д – необходимая величина звукоизоляции, дБ LА – уровень от источника, дБ; Lg – допустимый уровень шума по нормам, дБ. Рис. 2.5.3. Параметры звукоизоляции Теперь, применив формулу (2.5.13), знаем на сколько дБ необходимо понизить звуковое давление. Исходя из полученного ...
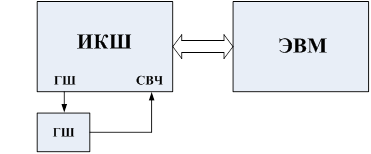
... – 3 0,1; 0,2; 0,4; 1; 2; 4 N8974A 0,01 – 6.7 0,1; 0,2; 0,4; 1; 2; 4 N8975A 0,01 – 26.5 0,1; 0,2; 0,4; 1; 2; 4 Таблица 4.3 - Технические особенности ИКШ серии NFА Структурная схема измерителя коэффициента шума N8973A представлена на рисунке 4.4. Рисунок 4.4 - Структурная схема ИКШ N8973A В преобразователе частот (блок радиоприемного тракта) спектр входного сигнала сначала ...
... Аорта 30-60 Большие артерии 20-40 Вены 10-20 Малые артерии, артериолы 1-10 Венулы, малые вены 0.1-1 Капилляры 0.05-0.07 Ограничения, налагаемые на частотный диапазон существующих допплеровских измерителей скорости кровотока, обусловлены, в основном, двумя причинами: сложностью получения приемлемых параметров УЗ преобразователя, выполненного на основе пьезокерамики, для работы на ...

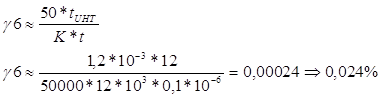
... возможную реализацию точностных характеристик измерительного блока во времени. Функции М ( t ) и s ( t ) можно представить в виде: М ( t ) = А х t ; s ( t ), = sо + В х t, где sо - дисперсия погрешности измерения отношения сигнал/шум в момент начала эксплуатации. Выбираем: sо = 0,5 Коэффициенты А и В выбираем по интенсивности внезапных отказов l å из соотношений ...
0 комментариев