Блок автоматического управления
Микропроцессорная система управления и диагностики (МСУД) электровозом ЭП1
Объект модернизации
Шунтирующие устройства ШУ-001, ШУ-003
Ячейка МК3.1
Ячейка аналого-цифрового преобразователя АЦ2
Ячейка входных формирователей ВФЗ
Устройство блока БИ1.6 ТЯБК.469136.113-04
Чтобы загрузить БИ1
Четырехступенчатый конвейер команд
Система прерываний
Генерация системного такта
Периферия микроконтроллера 80С166
Аналого-цифровой преобразователь (АЦП)
Навигация
Аналого-цифровой преобразователь (АЦП)
Мехатронная система обеспечения заданной скорости электровоза на различных участках пути
82531
знак
7
таблиц
17
изображений
3.7 Аналого-цифровой преобразователь (АЦП)
Ряд микроконтроллеров семейства C166 имеет встроенный АЦП, построенный по принципу аппроксимации со схемой выборки - хранения на кристалле. Схема мультиплексирования позволяет организовать до 16 и более входных каналов. Для компенсации ошибок преобразования служит автоматическая самокалибровка. Полное время преобразования АЦП составляет 9,7 мкс при частоте процессора 20 МГц.
| C161RI | C164 | C166 | C167 | C167CS | |
| Количество каналов | 4 | 8 | 10 | 16 | 16 + 8 |
| Разрядность | 8 | 10 | 10 | 10 | 10 |
| Время преобразования, мкс | 7,5 | 9,7 | 9,7 | 9,7 | 9,7 |
Модуль АЦП имеет гибкие режимы преобразования:
§ одноканальное однократное
§ одноканальное при периодическом опросе датчика
§ многоканальное однократное
§ многоканальное при периодическом опросе датчика
§ по выбранному каналу во время непрерывного преобразования
При периодическом опросе датчика следующее преобразование производится автоматически по окончании предыдущего. Времена выборки и преобразования устанавливаются в регистре управления АЦП. После окончания преобразования регистр результата содержит 10-разрядный результат, и номер канала, а в регистре управления устанавливается флаг прерывания. Если результат преобразования не считывается до начала следующего преобразования, устанавливается флаг ошибки, и вырабатывается прерывание. Для сохранения результата внеочередного преобразования по выбранному каналу во время непрерывного преобразования предусмотрен специальный регистр. Ниже на рисунке 3.7 приведена упрощенная блок-схема АЦП.
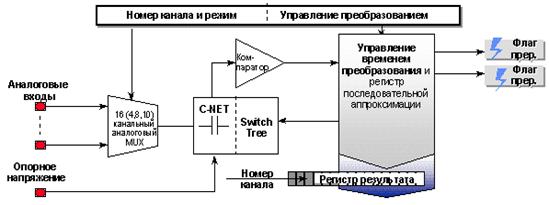
Рисунок 3.7 – Упрощенная блок схема АЦП
ЗАКЛЮЧЕНИЕ
Проведя анализ существующих микропроцессорных устройств управления становится ясно, что они не соответствуют современным требованиям и морально устарели. На сегодняшний день существуют технологии применение которых способно снизить затраты на производство, эксплуатацию и ремонт устройств управления. Одной из них является современный микроконтроллер, включающий в себя все необходимые для выполнения той или иной задачи периферийные модули.
В данной курсовой работе было решено использовать микроконтроллеры фирмы Siemens Semiconductors. Из этого семейства был выбран микроконтроллер 80C166. Эффективное программирование МК 80С166 достигается благодаря мощной системе команд, поддерживающей вычисления над 8-, 16- и 32-разрядными операндами, операции умножения и деления (MUL, DIV), контроль границ стека, управление периферией через регистры специальных функций Special Function Register (SFR). Следует также отметить высокую пропускную способность, мощную систему адресации и поддержку программирования на языке высокого уровня. При тактовой частоте процессора 16, 20 и 25 МГц цикл выполнения команды составляет 125,100 и 80нс соответственно, встроенная память, промышленные температурные диапазоны и др. Кроме того он содержит необходимые для устройств управления встроенные периферийные модули: 10-разрядный АЦП и таймеры.
В результате была усовершенствованна микропроцессорная система управления и диагностики МСУД.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Стрельцова В.А. Электровоз ЭП1. Руководство по эксплуатации: Техническое описание. – Ростов-на-Дону: ВЭлНИИ – К7, 1997г.
2. Ноженко Н.Я. Аппаратура МСУД. Руководство по эксплуатации: Альбом иллюстраций. – Ростов-на-Дону: ПКП «ИРИС», 2005г.
3. Кулинич Ю.М. Электронное оборудование электровозов переменного тока с плавным регулированием напряжения: Учебное пособие.– Хабаровск: ДВГУПС, 1998. – 96 с.
0 комментариев