Пневматические исполнительные механизмы
Позиционеры
Сборка мембранных исполнительных устройств
Устанавливают мембранный исполнительный механизм на регулирующий орган и закрепляют его специальной гайкой 11 (рис.3)
Ремонт седел и затвора
Испытание регулирующих органов на герметичность в седлах и прокладках
Навигация
Исполнительные механизмы
Исполнительные механизмы
58315
знаков
1
таблица
6
изображений
Общие сведения
Совершенствование любого промышленного предприятия, повышение производительности его оборудования, улучшение технологии производственных процессов и качества продукции невозможно без хорошо налаженного метрологического обеспечения.
Научной основой является метрология – наука об измерениях, методах и средствах установления их единства, способах достижения требуемой точности измерений, а технической основой – система обязательной государственной и ведомственной поверки и планово-предупредительного ремонта средств измерений, обеспечивающая их единообразие при эксплуатации.
Государственная система промышленных приборов и средств автоматизации (ГСП) представляет собой комплекс унифицированных взаимозаменяемых приборов и устройств, предназначенных для использования в промышленности в качестве технических средств автоматических и автоматизированных систем контроля, измерения, регулирования и управления технологическими процессами.
Внедрение ГСП обеспечивает создание приборов и устройств систем автоматизации на принципах унификации, агрегатирования, совместимости. Унификация позволяет сократить номенклатуру выпускаемых промышленных приборов и устройств при полном удовлетворении потребностей промышленности, удешевить их стоимость, уменьшить эксплутационные затраты. Агрегатирование позволяет компоновать различные приборы, регуляторы, преобразователи из типовых унифицированных деталей, узлов, модулей и агрегатов, обладающих функциональной и геометрической взаимозаменяемостью, т.е. улучшает качество изделий, сокращает затраты на изготовление и повышает надёжность их работы.
Совместимость на основе унификации сигналов связи, конструктивных присоединительных размеров, параметров питания, метрологических характеристик, эксплутационных требований позволяет скомпоновать приборы и устройства различного назначения в автоматические системы контроля, регулирования и управления технологическими процессами, а также осуществить их взаимную заменяемость.
По функциональному признаку приборы и устройства ГСП подразделяются на следующие группы: получения информации о состоянии процесса; ввода и вывода информации; преобразования и хранения информации; использования информации; вспомогательные. Отдельные изделия ГСП могут сочетать в себе несколько вышеперечисленных функций.
Контрольно-измерительные приборы используются для измерения и записи различных технологических параметров (давления, температуры, уровня, расхода, состава и др.), в них могут быть встроены дополнительные устройства для осуществления сигнализации предельно допустимых значений параметра, преобразования и передачи сигнала к другим измерительным системам и регуляторам суммирования и др.
Информационный сигнал об измеряемом параметре передаётся от первичного ко вторичному преобразователю по линиям связи (электрические провода, пневмотрубки и т.д.).
В зависимости от вида энергии носителя сигналов в канале связи, применяемого для приёма, выдачи и обмена информации, изделия ГСП подразделяются: на электрические; пневматические; гидравлические; использующие другие виды энергии носителя сигналов; комбинированные; работающие без использования вспомогательной энергии.
Системные принципы, положенные в основу построения ГСП, позволили экономически и технически рационально решить проблему обеспечения техническими средствами АСУТП.
Широкое внедрение автоматизации производственных процессов является не только одним из важнейших факторов повышения производительности труда, но и важнейшим средством повышения качества продукции, уменьшения отходов при производственных процессах, что значительно уменьшает себестоимость продукции.
Высококачественный ремонт приборов и автоматических регуляторов – важнейшая часть метрологического обеспечения предприятий отрасли.
1. ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
1.1 Устройство и принцип работы исполнительных механизмов
Исполнительный механизм (ИМ) представляет собой приводную часть исполнительного устройства.
Исполнительный механизм (ИМ) предназначен для перемещения регулирующего органа под воздействием сигнала от управляющего устройства.
По виду потребляемой энергии ИМ подразделяются:
- электрические;
- пневматические;
- гидравлические.
Наиболее часто применяются электрические и пневматические ИМ.
Электрические ИМ по принципу действия подразделяются на электромагнитные и электродвигательные.
Электромагнитные ИМ используют электромагниты серии ЭВ. Электромагниты типа ЭВ-1, ЭВ-2 (тянущий тип) и электромагнитный ЭВ-4 (толкающий тип) применяются в ИМ, рассчитанных на длительное обтекание их катушек электрическим током.
Возможные отказы в работе электромагнитных ИМ связаны с изменением сопротивления изоляции электрических цепей и катушек, нарушением регулировки блокировочных контактов, неисправностью выпрямителя, изменением напряжения (тока) срабатывания и отпускания электромагнитов, неисправностью механической части, что приводит к увеличению тока срабатывания и выходу из строя катушек.
Исправность механической части определяют при внешнем осмотре, при котором обращают внимание на мягкость хода, отсутствие заеданий и перекосов в подвижной системе, плотность прилегания якоря к ярму, отсутствие грязи на шлифованных поверхностях.
Электродвигательные ИМ, начиная с 1986 г., выпускаются промышленностью как однооборотные типа МЭО, применяемые для приводов заслонок, кранов, и многооборотные типа МЭМ, применяемые для управления запорными регулирующими органами (вентилями, задвижками).
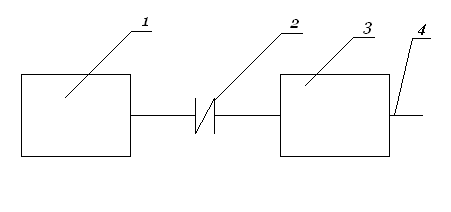
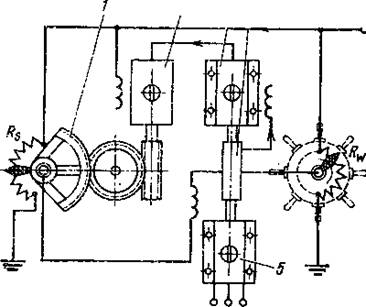
Исполнительные механизмы однооборотные контактные типа МЭОК и бесконтактные типа МЭОБ состоят из электрических серводвигателей (трёхфазные асинхронные двигатели) с электромагнитным тормозом (МЭОБ) и блоком серводвигателей (БС). Блоки БС выпускаются в трёх исполнениях (рис1).
БС-1 содержит концевые и путевые выключатели (2 пары) и реостатный датчик для дистанционного указателя положения;
БС-2 содержит концевые и путевые выключатели (2 пары), реостатный датчик для дистанционного указателя положения и дифференциально-трансформаторный датчик обратной связи;
БС-3 – то же, что и БС-2, но устройство настройки дифференциально-трансформаторного датчика обратной связи допускает возможность установки «Люфта» хода его плунжера в пределах 20 – 100 % угла поворота выходного вала.
Реостатный датчик предназначен для работы с индикатором положения ИПУ для дистанционной передачи угла поворота выходного вала в процентах полного рабочего поворота.
Дифференциально-трансформаторный датчик служит для получения сигнала переменного тока, пропорционального перемещению выходного вала ИМ.
При предмонтажной проверке выполняют такие операции:
- проверяют электрические цепи омметром между клеммами 4 – 5; 6 – 7; 8 – 9 и 10 – 11. Цепи должны быть замкнуты при включённых выключателях В1 – В4 соответственно и разомкнуты при выключенных (рис.1);
- устанавливают блок серводвигателя на серводвигатель, закрепляют поводок на выходном валу так, чтобы его отверстие для соединения с выключающей тягой блока серводвигателя и ось выходного вала находились в одной горизонтальной плоскости;
- устанавливают движок реостатного датчика в среднее положение относительно верхнего и нижнего хомутиков датчика. Регулируя длину выключающей тяги, сочленяют её с рычагом и поводком сервомотора, затем к клеммам 1-2-3 блока подключают индикатор положения типа ИПУ и подают напряжение. Полностью вводят потенциометр чувствительности «Ч»
Корректором «К» ИПУ устанавливают стрелку на середину его шкалы.
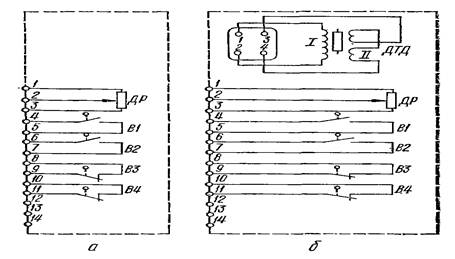
Рис. 1. Электрические схемы блоков сервомоторов типа БС:
а – БС-1; б – БС-2 и БС-3; ДТД дифференциально-транспортный датчик; ДП – датчик реостатный; В1 – В4 концевые и путевые выключатели.
Поворачивают выходной вал сервомотора при помощи штурвала ручного управления на 45о от среднего положения против часовой стрелки (смотреть со стороны выходного вала). При этом стрелка индикатора ИПУ должна переместиться в сторону «0» его шкалы. В противном случае необходимо поменять местами концы на клеммах 1-3 блока БС либо 6-7 ИПУ. С помощью потенциометра «Ч» ИПУ устанавливают стрелку на «0». При этом должен разомкнуться контакт выключателя. Размыкание выключателя регулируют регулировочным винтом; устанавливают вал ИМ и стрелку индикатора ИПУ в среднее положение.
Аналогичным образом регулируют положение потенциометра «Ч» при установке стрелки индикатора на 100 % и размыкание выключателя при повороте выходного вала на 45о против часовой стрелки.
Указанные операции повторяют до тех пор, пока при крайних положениях выходного вала МЭО стрелка ИПУ не будет устанавливаться точно на крайних делениях. Стрелка должна перемещаться плавно, без скачков. В противном случае зачищают обмотку реостат по линии касания движка.
После сочленения МЭО с регулирующим органом иногда проводят дополнительную регулировку. Уточняют действительный поворот выходного вала, обеспечивающий перемещение штока регулирующего органа из одного крайнего положения в другое, корректируют положение механических упоров. Конечные выключатели устанавливают так, чтобы они срабатывали при подходе кривошипа к упору на угол, равный 3о.
Похожие работы
... на его поверхности в каждый момент времени и передавать данные об этом последовательный порт компьютера. 1. Анализ поставленной задачи Темой курсового проекта является «Устройство контроля позиционирования исполнительного механизма». Данное устройство предназначено для наблюдения за работой исполнительного механизма, задания скорости его вращения, контроля позиционирования (т. е. сравнения ...
тью, малыми потерями на трение, технологичность. 1 ТЕХНИЧЕСКОЕ ПРЕДЛОЖЕНИЕ 1.1 Анализ задания Требуется разработать исполнительный механизм с заданным выходным моментом, частотой вращения, и точностью передачи. Двигатель на входе редуктора создает входной момент с частотой вращения двигателя. При помощи редуктора преобразуются требуемые выходные параметры проектируемого механизма на ...
щего органа Выполнил: студент группы АТП-05 Проверил: Баев А.В. Иркутск 2008-07-15 1. Определение диаметра трубопровода по заданному максимальному расходу среды и допустимым скоростям потока. Приняв скорость движения жидкости в трубопроводе 2м/с, вычислим Округляем диаметр D до ближайшего стандартного значения Dт. Уточненяем скорость ...
... машины широко используют в качестве гидродвигателей. Гидродвигатели используются в гидроприводах палубных механизмов. 6. Элементы объёмного гидропривода: рабочие жидкости; гидроаппаратура, гидролинии и гидроёмкости, кондиционеры рабочей жидкости Объемным гидроприводом наз совокупность объем гидромашин, гидроаппаратуры и вспомогательных устройств соед. с помощью гидролиний. Предназначена для ...
0 комментариев