Расчетно-технологический раздел
Определение режима водопотребления и расчетных расходов воды
Определение противопожарного расхода
Трассировка и конструирование водопроводной сети
Гидравлический расчет водоводов
Расчет напорно-регулирующих сооружений
Установка обеззараживания воды
Контроль процессов обработки воды
Мероприятия по охране окружающей среды
Расчёт затрат на электроэнергию
Расчёт затрат на оплату труда административно управленческого персонала
Расчёт общехозяйственных расходов
Навигация
Установка обеззараживания воды
Проект водоснабжения с. Бурибай Хайбуллинского района
94449
знаков
14
таблиц
12
изображений
2.8.2 Установка обеззараживания воды
Для обеззараживания воды в проекте применена ультрафиолетовая технология обработки воды. Выбор технологии обусловлен:
Во-первых, с новыми научными проработками проблемы, доказывающими, что ультрафиолетовое излучение может применяться как альтернатива окислительным методам (хлорированию, озонированию) за счёт простоты, безопасности и низких эксплуатационных затрат. К бесспорным достоинствам технологии ультрафиолетового обеззараживания относится отсутствие какого-либо воздействия на химический состав воды, что позволяет решать задачи обеззараживания без образования побочных токсичных продуктов.
Во-вторых, серийный выпуск отечественных установок, отвечающих требованиям международных стандартов и способных обеспечить приемлемые технико-эксплуатационные и экономические показатели позволяет значительно расширить область применения ультрафиолетовой обработки.
В-третьих, появилась возможность обеспечения надёжного санитарно-эпидемиологического контроля за обеззараженной водой, так как в 1998 году были утверждены Методические указания («Санитарный надзор за применением ультрафиолетового излучения в технологии подготовки питьевой воды». № 2.1.4.719-98), в которых впервые установлена доза облучения, а также определены правила эксплуатации и контроля работы ультрафиолетовых установок. Величина дозы облучения впервые утверждена в качестве косвенного показателя достижения бактерицидного эффекта.
Целью расчета установок обеззараживания воды является определение мощности излучения, объема камеры и числа ламп заданной мощности. По расходу воды q4= Qрасч/24=66,4 м3/ч в проекте приняты 1 УДВ 50/70 установок, выпускаемых НПО ПИТ,
Размеры установки 1400 х 1520 х 420 мм мощность 1,8 кВт. Время пребывания воды в камере
t=![]() (25)
(25)
где S - поперечное сечение камеры, S = 5880 см2
L - длина камеры, L= 152 см
пу- число установок, пу= 1
t=25c
t 10 с, что удовлетворяет требованиям [5]
t=![]() =48/49 c
=48/49 c
Количество ламп
n=![]() (26)
(26)
где NH - требуемая мощность, N„ = 1,8 кВт [5]
Nn - единичная паспортная мощность лампы,
Nn=0,6KBm
n=![]() =3
=3
Потери напора в бактерицидной установке
h6 = 0,000022 (g4/ny)2 0,4м (27)
h6 = 0,000022 (66,3/З)2 = 0,01м
2.9 Расчет водозаборных сооружений
Проверочный расчет скважин. Дебит скважины, м3/сут
Qскв=qуд*S*86,4 (28)
где qyd - удельный дебит, qyd = 3,47 а/с
S - понижение уровня, S = 1,5 м
Qcm=449,7 м3/сут
Потребное количество скважин
п= 1591,2/449,7 4скв.
С учетом перспектив развития с-Бурибай потребуется расширение водозабора до 5 скважин (4 рабочих и 1 резервная)
2.10 Подбор насосов
Подача насосов 18,7 м3/ч Требуемый напор, м
Нтр = ZMaKC - Z0H +h6 + hф + hв + h3H(29)
где Zмакс- отметка максимального уровня воды в баке башни, Zмакс=387,59 м
Zqh - отметка оси насосов, Z0H = 306,04 м
hб - потери напора в бактерицидной установке, h6 =0,01 м
hф - потери напора в фильтре, hф= 5,5 м [1]
hв - потери напора в водоводах от скважин до башен,hв=0,11м h3H - запас напора, h3H = 1м
Нтр = 387,59-306,04+ 0,01 +5,5 + 0,11 + 1 = 88,17 м
В скважинах установлены насосы марки 1ЭЦВ6-16-110Г, которые обеспечивают расчетные параметры.
3. Эксплуатационный раздел
3.1 Автоматизация работы насосов
Использование регулируемого электропривода насосных агрегатов в системах коммунального и промышленного водоснабжения в течение последних 5-7 лет явилось предметом пристального внимания со стороны эксплуатирующих организаций. Стало очевидно, что регулирование скорости рабочего колеса насосов позволяет существенно повысить энергетические показатели установок, получить значительную экономию электроэнергии, и сократить потери воды за счет исключения избытка давления в гидравлической сети. К настоящему времени в различных городах и регионах России накоплен значительный опыт применения регулируемого электропривода насосных агрегатов для систем холодного и горячего водоснабжения.
В большинстве случаев реализация этого технического мероприятия выполняется в порядке модернизации действующих насосных станций: в цепи питания асинхронного двигателя насоса устанавливаются преобразователи частоты, позволяющие регулировать скорость двигателя. При этом используются преобразователи иностранных компаний: Hitachi (Япония), Mitsubishi (Япония), Dan Foss (Дания) и др., а также разработки отечественных фирм: "Триол", "Приводная техника", ЧЭАЗ, МПП "Цикл" и прочих.
Существующая практика внедрения регулируемого электропривода для насосных агрегатов выявила определенные недостатки в организации и техническом содержании этих работ. Отсутствует единая техническая политика в данной области. Разрозненная поставка насосных агрегатов, коммутирующего электрооборудования, преобразователей частоты и устройств автоматики затрудняет проектирование и внедрение автоматизированных насосных станций. А несогласованность отдельных элементов может снизить эффективность использования регулируемого электропривода насосных агрегатов.
Эффективное использование возможностей регулируемого электропривода и систем автоматики может быть в полной мере реализовано, если это станет делом насосостроительных предприятий. Такая тенденция ярко проявляется в деятельности передовых зарубежных фирм. Указанный тезис может быть обоснован научно-техническими, конструкторскими, проектными, организационными, маркетинговыми и эксплуатационными соображениями.
Насосный агрегат для экономичной эксплуатации должен иметь возможность адаптироваться к условиям и режимам работы конкретного потребителя. Для этого необходимы:
• согласование характеристик насоса с характеристиками гидравлической сети, на которую он работает;
• согласование характеристик параллельно работающих насосов;
• обеспечение переменного режима работы, связанного с регулированием подачи воды в соответствии с нуждами потребителя.
Сегодня избыток давления (напора) большинства насосных станций и гидравлических сетей до 40% превосходит объективно требуемый уровень, что вынуждает гасить избыток напора гидравлическими средствами. Это связано с тем, что при проектировании насосных станций насосы выбираются из стандартного ряда с большим запасом по напору и рассчитываются на максимальный режим расхода. Рабочая зона реального режима работы не всегда совпадает с зоной оптимального КПД насосов.
Если насос работает с постоянной стандартной скоростью вращения, то необходимая адаптация осуществляется внешними гидравлическими средствами, что связано со значительными потерями энергии. Также следует отметить, что при конструировании насоса его характеристики оптимизируются для узкой рабочей области одного номинального режима, которая практически не используется. На практике высокий уровень КПД наших насосов остается невостребованным.
Одним из главных преимуществ использования регулируемого электропривода насосных агрегатов является возможность адаптации его характеристик к характеристикам гидравлической сети посредством выбора рациональной номинальной скорости вращения рабочего колеса, отвечающей основному режиму работы установки. При этом номинальная скорость может быть как выше, так и ниже стандартного значения.
Большинство насосов и насосных станций работает или объективно должны работать с переменной производительностью. Гидравлические способы не экономичны и не дают возможности автоматизированного регулирования.
Второе принципиальное преимущество регулируемого электропривода состоит в том, что если насосный агрегат должен работать с переменной производительностью, то с энергетической точки зрения это наиболее рационально осуществлять путем регулирования скорости рабочего колеса насоса. На основании вышеизложенного можно предложить установочную систему СТЭП.
Станция управления типа СТЭП предназначена для автоматического, дистанционного и ручного управления технологическими электроприводами, насосными агрегатами и вентиляторами с асинхронными электродвигателями с короткозамкнутым ротором, в том числе работающих в системах холодного и горячего водоснабжения, системах отопления и вентиляции. Станция СТЭП может работать как составная часть системы электрооборудования центральных и индивидуальных тепловых пунктов, насосных, котельных, промышленных установок и технологических комплексов.
Станция управления автоматизированным технологическим электроприводом типа СТЭП соответствует ГОСТ Р 51321.1-2000 (МЭК 60439-1-92), ТУ3431-001-78539533-2005 и имеет сертификат соответствия №РОСС RU.ME79.B00915

Станция управления состоит из:
• преобразователя частоты со встроенным ПИД-регулятором, обеспечивающим плавный пуск и останов, а также управление любым электродвигателем станции в функции выбранной технологической переменной (для станций с преобразователем частоты СТЭП-Х-Х-Х-Ч-Х-Х);
• плавного пускателя (софт-стартера), обеспечивающего плавный пуск и останов, ограничение пусковых токов электродвигателей, отсутствие гидравлических и механических;
• блока сопряжения с системой дистанционного управления, осуществляющей выдачу управляющих воздействий на преобразователь частоты (плавный пускатель) и электродвигатели;
• блока автоматики, осуществляющего получение и обработку информации, и выдачу управляющих воздействий на преобразователь частоты (плавный пускатель) и электродвигатели;
• панели управления и сигнализации, позволяющей осуществлять выбор режима управления преобразователем частоты (плавным пускателем) и насосными агрегатами, визуальный контроль за режимами работы преобразователя частоты (плавного пускателя) и каждого агрегата, а также оперативно изменять значение регулируемого параметра непосредственно с панели управления;
• пускозащитной аппаратуры, осуществляющей подключение выбранного агрегата к выходу преобразователя частоты (плавного пускателя) или сети, и защиту от коротких замыканий и перегрузок по току.

Основные функции станций управления
• поддержание заданного значения технологического параметра. Например, давления на выходе группы насосных агрегатов;
• режим работы электродвигателей рабочий резервный или рабочий дополнительный;
• автоматическая смена работающих электродвигателей через заданные интервалы времени для обеспечения равномерной загрузки (для станций управления типа СТЭП1;
• контроль над работой агрегатов и переключение на резервный при аварии рабочего (для станций управления типа СТЭП1;
• обеспечение оперативного управления режимами работы станции непосредственно с панели управления;
• возможность запуска и останова каждого агрегата в режиме ручного управления прямым пуском от сети;
• выдача на диспетчерский пульт сигналов о режимах работы станции ;
• защита электродвигателей от перегрузки и действия токов короткого замыкания.
Характерным направлением в развитии автоматизированного электропривода является создание комплектных устройств, управления, которые особенно целесообразны для таких механизмов, как насосы, вентиляторы и компрессоры, вследствие относительной простоты. В качестве примера на рисунке приведен один из упрощенных вариантов схемы управления электроприводом погружной насосной установки, которая используется для подачи воды из скважин в баки; водонапорных башен или в другие резервуары. Все электрооборудование схемы управления поставляется промышленностью в комплектном виде. Большая его часть выполняется на логических элементах и предназначается для установок, работающих в сырых помещениях при наличии брызг и агрессивной среды.
В приведённом примере асинхронный короткозамкнутый двигатель АД, конструктивно выполненный совместно с насосом, устанавливается в скважине и питается по кабельной линии от силовой сети переменного тока через автоматический выключатель АВ и контактор Л. Схемой управления предусмотрены три режима работы двигателя: с местным, автоматическим и дистанционным управлением.
Автоматическое управление насосом осуществляется в зависимости от уровня воды в баке водонапорной башни или резервуаре. В этом режиме работы замкнуты контакты выключателя В1. При отсутствии воды в баке контакты датчиков нижнего и верхнего уровней КНУ и КВУ разомкнуты. Поэтому на входе элемента Э6 напряжение U отсутствует (сигнал 0), а на его выходе имеется сигнал 1. Этот сигнал подается на усилитель мощности Э7, который включает реле Р. Последнее замыкает свой контакт в цепи катушки контактора Л, контактами которого включается двигатель АД насоса, и вода поступает в водонапорную башню. При достижении нижнего уровня замыкается контакт датчика КНУ, однако он не производит никаких переключении в схеме, так, как в это время разомкнут последовательно включенный с ним контакт реле Р. При достижении верхнего уровня замыкается контакт КВУ и на вход элемента Э6 от источника напряжения U поступает сигнал 1, который отключает реле Р и контактор Л. Двигатель останавливает поступление воды в бак прекращается. При снижении уровня воды контакт КВУ снова размыкается, однако на входе элемента 36 по-прежнему остается сигнал 1, который подается от источника напряжения U через замкнутые контакты КНУ и Р. Поэтому двигатель насоса не включается. Двигатель включится лишь тогда, когда уровень воды станет ниже места установки датчика КНУ. При этом контакт КНУ разомкнётся, на вход элемента Э6 поступит сигнал 0, и цикл работы насоса повторится.
Дистанционное управление позволяет диспетчеру, находящемуся на значительном удалении от скважины, включать и отключать насос вне зависимости от его работы в автоматическом режиме управления. Оно осуществляется при подаче команд от устройств телемеханики на исполнительные реле включения РИВ и отключения РИО. Если диспетчеру необходимо отключить работающий насос, то по команде телемеханического устройства включается реле РИО, контакт которого подает сигнал 1 на вход элемента 36. 1 Включение насоса осуществляется при подаче диспетчером команды, включающей реле РИВ. Размыкающий контакт последнего подает на вход элемента 36 сигнал 0.
Для осуществления местного управления насосом необходимо разомкнуть контакты выключателя В1. При этом на входе элемента 36 будет постоянно присутствовать сигнал 0, а на его выходе — сигнал 1. Поэтому на выходе усилителя 37 постоянно имеется напряжение, которое включает либо отключает катушку реле Р в зависимости от положения контактов выключателя местного управления В2.
Схема управления предусматривает отключение двигателя насоса при перегрузке, при работе двигателя на двух фазах, при симметричных и несимметричных токах короткого замыкания. Во всех перечисленных случаях увеличивается ток в фазах статора двигателя, что приводит к увеличению постоянного напряжения на выходе выпрямителя, подключенного к выходным обмоткам трансформатора тока 77"? - ТТ3. Это напряжение подается на релейный элемент. 31, который преобразует непрерывный сигнал в дискретный, необходимый для управления схемой логики. Сигнал с выхода элемента 31 поступает на вход В элемента временной задержки 32. Последний имеет характеристику с обратной зависимостью выдержки времени от тока в цепи статора двигателя. Непрерывный сигнал, пропорциональный току статора подается на вход Л элемента 32. При превышении тока уставки, которая регулируется резистором R, срабатывает релейный элемент, и сигнал 1 с вы держкой времени, обратно пропорциональной току, подается на вход элемента 33. Элементы 33 и 34 образуют элемент «Память», поэтому сигнал о срабатывании защиты запоминается и подается с выхода 34 на входы элементов 35 и 36. Первый из них включает сигнальную лампу ПС, а второй отключает реле Р и соответственно двигатель насоса.
Для стирания «Памяти» перед пуском двигателя необходимо нажать кнопку К, через замкнутые контакты которой подается сигнал 1 на вход элемента Э4.
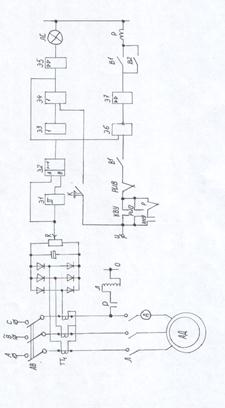
Рисунок 4 – Схема управления асинхронным двигателем погружного насоса
0 комментариев