Навигация
Конкретизация технического задания
26826
знаков
1
таблица
5
изображений
1. Конкретизация технического задания
Задано, что разрабатываемым цифровым устройством является цифровой спидометр для органов государственной автомобильной инспекции (радиолокационный прибор с цифровой индикацией скорости). Контролируемая скорость должна быть не менее 200 км/ч, для измерения скорости можно использовать эффект Доплера. Проектируемое устройство должно измерять скорость автомобиля, индицировать его в км/ч очевидно на трёх семисегментных индикаторах, осуществлять контроль за превышением скорости и осуществлять фотосъёмку автомашины, превысившей максимально допустимую скорость. Допустимую скорость можно задавать на программных переключателях.
Применение здесь микроконтроллера полностью оправдано, т. к. скорость автомобиля математически выражается через доплеровский сдвиг частоты .
В передвижном варианте радара особых требований к рабочему температурному режиму не предъявляется, т. к. микропроцессорная часть проектируемого устройства размещается внутри салона автомобиля, снабжённого отопительной установкой. В стационарном варианте необходимо обеспечить температурный режим, не нарушающий работоспособность микропроцессорной системы.
Предполагаемое конструктивное исполнение проектируемого устройство - отдельное изделие.
2. Разработка функциональной схемы устройства
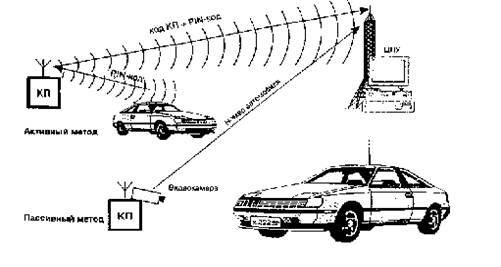
3.1 Радиолокационная установка (РЛУ)
Радиолокационные приборы излучатель и приёмник могут быть устроены по супергетеродинной схеме, основанной на двухканальном, амплитудно-импульсном методе, так, как показано на рисунке 3.1. На этом рисунке приведён пример доплеровской радиолокационной установки с непрерывным излучением.
Эхо сигнал от движущейся цели принимается приемниками канала 1 и канала 2. После преобразования в первом канале первичная частота:
fпч = fпр ± Fd1, соответственно во втором канале fпч = fпр ± Fd2, где Fd1 и Fd2 – доплеровские добавки, а fпр – первоначальная частота, задающаяся гетеродинами 1 и 2 каналов.
 |
Сигналы с выходов каналов складываются в сумматоре, где выделяется частота биения Fб = Fдоп = Fd1 – Fd2. Следовательно:
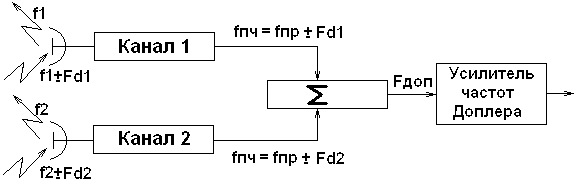 |
Рисунок 3.1 - Функциональная схема радиолокационной установки
, где с – скорость света.
Рассмотрим подробную работу схемы РЛУ.
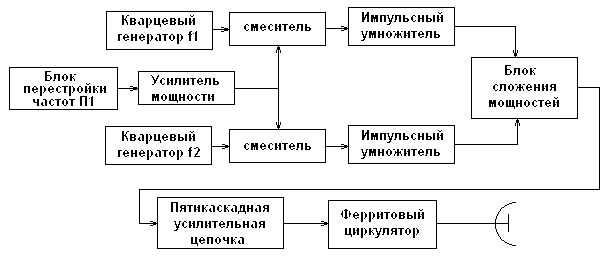
Рисунок 3.2. – Тракт зондирующего импульса
Тракт зондирующего импульса рис 3.2 предназначен для формирования высокочастотных зондирующих импульсов из маломощного непрерывного сигнала. Непрерывный сигнал с кварцевого генератора блока перестройки частот П1 усиливается усилителем мощности (в блоке П1 задается частота fзад). В смесителях происходит сложение несущей частоты f1 в первом канале и f2 во втором канале с частотой fзад. Затем образованные частоты складываются в блоке сложения мощностей для последующего усиления в пятикаскадной усилительной цепочке. Ферритовый циркулятор служит для переключения РЛУ с приема на передачу и обратно.
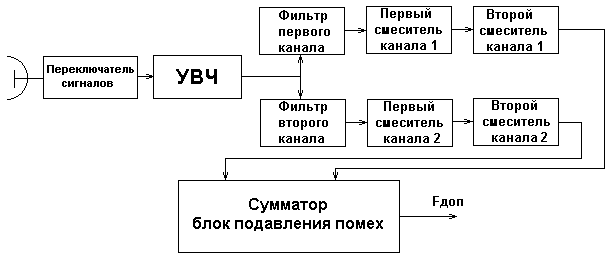 |
Рисунок 3.3. – Тракт эхо сигнала
Тракт эхо сигнала (сигнала поступающего от движущегося автомобиля) рис 3.3. выполнен по супергетеродинной схеме с двойным преобразованием частоты. Отраженные от автомобиля сигналы f1 ± Fd1 и f2 ± Fd2 поступают на фильтры первого и второго каналов через переключатель сигналов и усилитель высоких частот. В этих фильтрах происходит разделение сигнала на два канала, после этого в первых смесителях под действием частоты fзад выделяются промежуточные частоты fпр. Дальше эхо сигнал поступает на вторые смесители где формируется оптимальная ширина пропускания. В сумматоре происходит совмещение двух импульсов и компенсация помех. На выходе сумматора имеем сигнал с частотой Доплера Fдоп.
Данная схема РЛУ свободна от таких недостатков как малочувствительность, потому что в ней отсутствуют тепловые и дробовые шумы, а так же мерцательные шумы, вносимые полупроводниковыми и электронными приборами. Мощность мерцательных шумов обратно пропорциональна частоте, и именно на низких доплеровских частотах шумы кристаллического смесителя могут значительно снизить чувствительность приёмника.
3.2 Микропроцессорная часть
Устройство можно спроектировать с применением однокристального микроконтроллера семейства МК48. Микросхемы семейств МК48 и МК51 получили наибольшее распространение среди микросхем такого класса. Использование микросхемы DD3 К1830ВЕ35 в данном случае - самый экономичный вариант реализации устройства. Функциональная схема устройства изображена на рисунке 3.4. Прикладную программу можно разместить во внешней памяти программ - микросхеме DD9 ПЗУ К556РТ5. Адрес очередной ячейки ПЗУ фиксируется во внешнем регистре DD4. Микроконтроллер содержит на кристалле три 8-разрядных порта. Линии порта P1 и линии P2.4-P2.7 используются для трёхразрядной индикации скорости (км/ч). Для индикации можно использовать тройку светодиодных семисегментных цифровых индикаторов HG1..HG3, например, типа АЛС324А. Индикаторы подключаются к портам микроконтроллера через дешифраторы DD6..DD8 (514ИД1), преобразующие двоично-десятичное содержимое портов в коды управления цифровыми индикаторами.
В данном варианте решения предполагается использование расширителя ввода/вывода DD5 - микросхемы К580ВР43. Расширитель ввода/вывода обеспечивает подключение четырёх дополнительных четырёхразрядных портов P4-P7. Порты P4, P5, P6 используются для ввода в микроконтроллер инверсного двоично-десятичного кода максимально допустимой скорости на данном участке дороги, для этого к ним подключаются три программных переключателя SA1..SA3 типа ПП10-ХВ, на лимбах которых и задаётся максимальная скорость. Линия 0 порта P7 используется для подачи управляющего импульса на аппаратуру фотосъёмки, которая запускается при появлении на линии P7.0 нулевого уровня.
У микроконтроллера задействованы входы T0 и T1. Со входом Т1 связан фотодатчик. Фотоэлемент формирует на входе T1 импульс с нулевым уровнем в тот момент, когда автомобиль проезжает мимо него, это используется для того, чтобы сделать фотоснимок автомобиля именно в нужный момент, если водитель превысил максимально допустимую скорость.
На вход микроконтроллера T0 поступают импульсы с уровнями ТТЛ с частотой Доплера. Для согласования сигнала с приёмного устройства радиолокационного прибора со входом T0 микроконтроллера используется цепочка, состоящая из триггера Шмита DD1 и счётного триггера DD2. Амплитуда напряжения синусоидальной формы с частотой Доплера на выходе усилителя приёмного устройства радиолокационного прибора достигает уровня, достаточного для срабатывания триггера Шмита. Счётный триггер формирует сигнал на тестируемом входе микроконтроллера.
Похожие работы
... —к «массе». Качество отработки элементов вождения по трудным грунтам зависит от наличия и состояния цепей противоскольжения, трековых дорожек, матов и средств самовытаскивания 4. РАЗРАБОТКА КОНСТРУКЦИИ ДУБЛИРУЮЩЕГО УСТРОЙСТВА УПРАВЛЕНИЯ 4.1. ОПРЕДЕЛЕНИЕ РАСЧЕТНОЙ НАГРУЗКИ НА ВАЛ, ВОЗВРАТНЫЕ ПРУЖИНЫ И ПЕДАЛИ. Номинальное усилие на дополнительные педали тормоза и сцепления будет находиться в ...


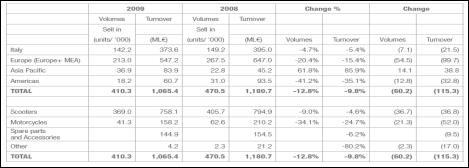
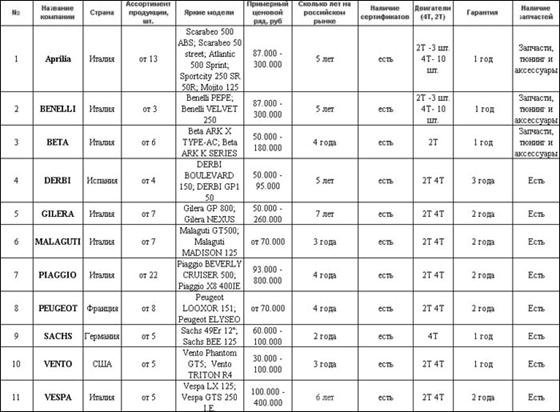
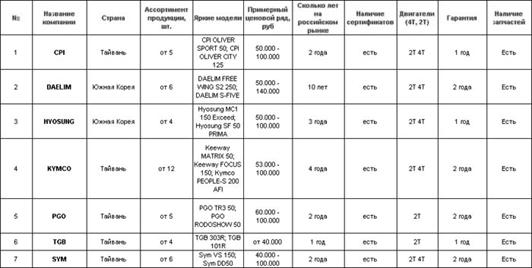
... Вы все же склоняетесь к покупке б/у японского скутера, рекомендуем прочитать обзор прошлого года и наши рекомендации по непосредственному выбору аппарата. 1000-1500$ В прошлом году на российском рынке появились новые 4-тактные китайские скутеры, цена которых составляет сегодня 1000-1500$. Гарантия на такой скутер в среднем - 1 год. Сделаны эти аппараты специально для европейского рынка, имеют ...

... 540x420x210 мм и имеет вес 13 кг; Ø Антенно-фидерная система скомпонована в радиопрозрачном колпаке диаметром 295 мм, высотой — 140 мм, весом 3 кг.[1] 4. Предложение системы защиты от слежения за автомобилем Итак, имеется автомобиль УАЗ - 462, перевозящий ценный груз, на котором скрыто установлена система, включающая GPS – приемник и GSM – передатчик и определяющая координаты данного ...
... учреждении и принимаемых мер по фактам дорожно-транспортных происшествий с участием детей. 2.2 План внеклассных мероприятий по профилактике детского дорожно-транспортного травматизма № пп МЕРОПРИЯТИЯ СРОК ОТВЕТСТВЕННЫЕ 1. Проведение уроков изучения Правил дорожного движения согласно программе Ежемесячно Классный руководитель 2. Проведение бесед на родительских ...
0 комментариев