Навигация
6 Заключение
Микропроцессоры и микропроцессорные системы являются основой построения электронных устройств с заданными функциональными свойствами. Решающими факторами при проектировании таких устройств являются удобство практической эксплуатации и новый набор - качественных характеристик (более высокое быстродействие, точность, новые функциональные возможности) по сравнению с домикропроцессорным вариантом реализации подобного устройства.
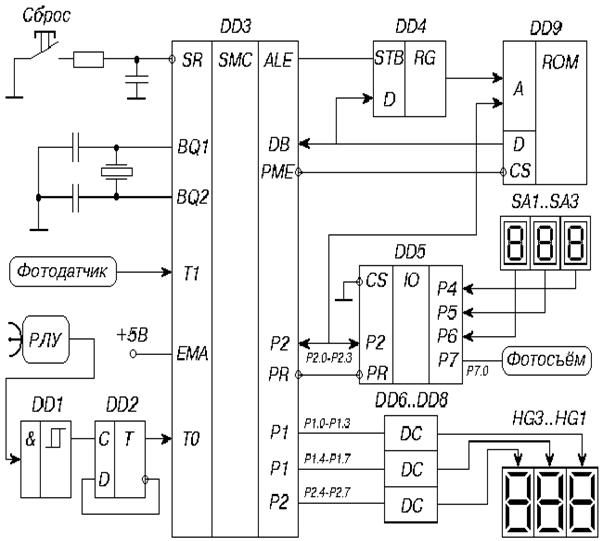
Реализация электронного устройства в данном курсовом проекте - цифрового радара ГИБДД - на однокристальном микроконтроллере серии МК48 К1830ВЕ35 оказалась самым экономичным вариантом.
Такого типа радары широко используются органами ГАИ для измерения и контроля скорости движущихся автомобилей. Полезной возможностью является выбор варианта исполнения цифрового радара. В передвижном варианте необходимыми частями устройства являются РЛУ и микропроцессорная часть. В стационарном варианте в комплект, кроме того, входят фотодатчик и фотосъёмочная аппаратура. В таком варианте изделие функционирует автономно и не требует постоянного вмешательства человека.
Данный курсовой проект позволил сделать серьёзные упражнения в применении знаний, полученных в процессе изучения дисциплины “Микропроцессорные устройства и системы”.
Список литературы
1 ОС ТАСУР 6.1-97. Работы студенческие учебные и выпускные квалификационные. Общие требования и правила оформления.
2 Шарапов А. В. Микропроцессорные устройства и системы. Методические указания к выполнению курсового проекта. - Томск: ТУСУР, 1998. - 39 с.
3 Шарапов А. В. Примеры решения схемотехнических задач. Учебное пособие. - Томск: ТИАСУР, 1994. - 141 с.
4 Шарапов А. В. Цифровая и микропроцессорная техника: Учебное пособие. 2-е изд., перер. и доп. - Томск: Изд-во Том. Ун-та, 1997. - 108 с.
5 Токхайм Р. Микропроцессоры: Курс и упражнения/ Пер. С англ., под ред. В. Н. Грасевича. - М.: Энергоатомиздат, 1988. - 336 с.
6 Белоцерковский Г. Б. Основы радиолокации и радиолокационные устройства. М.: Сов. Радио, 1975. - 336 с.
Приложение А
Листинг управляющей программы
Основная программа:
1 0000 99 00 MAIN: ANL P1,#00H ; üПогасить индикаторы и
2 0002 9A 0F ANL P2,#0FH ; þподготовить порты к выводу.
3 0004 D5 SEL RB1 ; ü
4 0005 0E MOVD A,P6 ; ½
5 0006 03 F0 ADD A,#0F0H ; ½
6 0008 A9 MOV R1,A ; ½Считать в регистры R0-R1
7 0009 0D MOVD A,P5 ; ýпервого банка РОНов инверсное
8 000A 47 SWAP A ; ½двоично-десятичное значение
9 000B A8 MOV R0,A ; ½максимальной скорости.
10 000C 0C MOVD A,P4 ; ½
11 000D 68 ADD A,R0 ; ½
12 000E A8 MOV R0,A ; ½
13 000F C5 SEL RB0 ; þ
14 0010 26 10 M1: JNT0 $ ; Ожидание появления импульса.
15 0012 27 CLR A ; ü
16 0013 A8 MOV R0,A ; ú
17 0014 A9 MOV R1,A ; úПодготовка регистров
18 0015 AA MOV R2,A ; ý к вычислениям.
19 0016 AB MOV R3,A ; ú
20 0017 AC MOV R4,A ; ú
21 0018 AE MOV R6,A ; ú
22 0019 BD 05 MOV R5,#05H ; þ
23 001B 36 1B JT0 $ ; Ожидание нулевого уровня T0.
24 001D 14 42 CALL N ; Вычисление числа N=(R1,R0).
25 001F 14 53 CALL Y ; Вычисление Y»10×Vа=(R6,R5).
26 0021 FD MOV A,R5 ; ü
27 0022 47 SWAP A ; ýПоместить в R5 младшую
28 0023 53 0F ANL A,#0FH ; úцифру значения скорости.
29 0025 AD MOV R5,A ; þ
30 0026 FE MOV A,R6 ; ü
31 0027 47 SWAP A ; úВ R5 две младшие цифры
32 0028 53 F0 ANL A,#0F0H ; ýзначения скорости.
33 002A 6D ADD A,R5 ; þ
34 002B AD MOV R5,A ; Вывести младшие цифры
35 002C 39 OUTL P1,A ; скорости на индикаторы.
36 002D FE MOV A,R6 ; üВыделить в старшем полубайте
37 002E 53 F0 ANL A,#0F0H ; þR6 старшую цифру скорости.
38 0030 3A OUTL P2,A ; Старшую цифру на индикатор.
39 0031 47 SWAP A ; üВ R6 старшая цифра
40 0032 AE MOV R6,A ; þзначения скорости.
41 0033 D5 SEL RB1 ; üСравнить старшие цифры
42 0034 69 ADD A,R1 ; ýVа и Vа.max и перейти на M0,
43 0035 C5 SEL RB0 ; úесли Vа>Vа.max.
44 0036 F6 3E JC M0 ; þ
45 0038 FD MOV A,R5 ; ü
46 0039 D5 SEL RB1 ; ú Сравнить младшие цифры47 003A 68 ADD A,R0 ; ý Vа и Vа.max и перейти на N0,
48 003B C5 SEL RB0 ; ú если Vа<Vа.max.
49 003C E6 40 JNC N0 ; þ
50 003E 14 6F M0: CALL PHOTO ; Фотосъёмка.
51 0040 04 10 N0: JMP M1 ; Повторить основную программу.
Подпрограмма измерения Tдоп(вычисления N):
52 0042 28 N: XCH A,R0 ; ü
53 0043 03 01 ADD A,#01H ; ú
54 0045 57 DA A ; ú
55 0046 28 XCH A,R0 ; ýИнкрементирование накопителя
56 0047 29 XCH A,R1 ; úN=(R1,R0).
57 0048 13 00 ADDC A,#00H ; ú
58 004A 57 DA A ; ú
59 004B 29 XCH A,R1 ; þ
60 004C BF 2F MOV R7,#2FH ; üВременная задержка 0.17 мс.
61 004E EF 4E DJNZ R7,$ ; þ
62 0050 26 42 JNT0 N ; Пока на T0 нулевой уровень.
63 0052 83 RET ; Выход из подпрограммы.
Подпрограмма вычисления Y»10×Vа=(R6,R5).
64 0053 2A Y: XCH A,R2 ; ü
65 0054 68 ADD A,R0 ; ú
66 0055 57 DA A ; ú
67 0056 2A XCH A,R2 ; úФормирование S в двоично-
68 0057 2B XCH A,R3 ; ýдесятичном накопителе
69 0058 79 ADDC A,R1 ; ú(R4,R3,R2).
70 0059 57 DA A ; ú
71 005A 2B XCH A,R3 ; ú
72 005B 2C XCH A,R4 ; ú
73 005C 13 00 ADDC A,#00H ; ú
74 005E 57 DA A ; ú
75 005F B2 6E JB5 M2 ; úЗакончить сложение N c S,
76 0061 2C XCH A,R4 ; þесли S>=200000.
77 0062 2D XCH A,R5 ; ü
78 0063 03 01 ADD A,#01H ; ú
79 0065 57 DA A ; ú
80 0066 2D XCH A,R5 ; úФормирование Y в двоично-
81 0067 2E XCH A,R6 ; ýдесятичном накопителе
82 0068 13 00 ADDC A,#00H ; ú(R6,R5)
83 006A 57 DA A ; ú
84 006B 2E XCH A,R6 ; þ
85 006C 04 53 JMP Y ; Продолжить вычисление Y.
86 006E 83 M2: RET ; Выход из подпрограммы.
Подпрограмма управления фотосъёмкой:
87 006F 56 6F PHOTO: JT1 $ ; Ожидание импульса фотодатчика.
88 0071 23 FE MOV A,#FEH ; üВывод 0 в линию P7.0.
89 0073 9F ANLD P7,A ; þ
90 0074 46 74 JNT1 $ ; Ожидание конца импульса.
91 0076 23 01 MOV A,#01H ; üВывод 1 в линию P7.0.
92 0078 8F ORLD P7,A ; þ
93 0079 83 RET ; Выход из подпрограммы.
Приложение Б
Карта прошивки памяти программ
0: 1: 2: 3: 4: 5: 6: 7: 8: 9: A: B: C: D: E: F:
0000: 99 00 9A 0F D5 0E 03 F0 A9 0D 47 A8 0C 68 A8 C5
0010: 26 10 27 A8 A9 AA AB AC AE BD 05 36 1B 14 42 14
0020: 53 FD 47 53 0F AD FE 47 53 F0 6D AD 39 FE 53 F0
0030: 3A 47 AE D5 69 C5 F6 3E FD D5 68 C5 E6 40 14 6F
0040: 04 10 28 03 01 57 28 29 13 00 57 29 BF 2F EF 4E
0050: 26 42 83 2A 68 57 2A 2B 79 57 2B 2C 13 00 57 B2
0060: 6E 2C 2D 03 01 57 2D 2E 13 00 57 2E 04 53 83 56
0070: 6F 23 FE 9F 46 74 23 01 8F 83 FF FF FF FF FF FF
0080: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
0090: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00A0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00B0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00C0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00D0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00E0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
00F0: FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
|
| |||||||||||||||||
| ФЭТ КП.XXXXXX.007 Э3 | |||||||||||||||||
| МИКРОКОНТРОЛЛЕР Схема электрическая Принципиальная | Лист | Масса | Масшт | ||||||||||||||
| Лист | №докум | Подпись | Дата | ||||||||||||||
| Разработ. | Ощепков | ||||||||||||||||
| Проверил. | Шевелев | ||||||||||||||||
| Т. контр. | Лист | Листов 1 | |||||||||||||||
| ТУСУР ФЭТ ПрЭ гр.367-3 | |||||||||||||||||
| Н.контр. | |||||||||||||||||
| Утв. | |||||||||||||||||
| Поз. Обозначен | Наименование | Кол. | Примечание | ||||||||||||||
| Резонатор кварцевый | |||||||||||||||||
| BQ1 | РК-160МА-14БП-12000кГц-В ОД 0.338.003 ТУ | 1 | |||||||||||||||
| Конденсатор | |||||||||||||||||
| C1, C2, C3 | К73-24-100В-0.68нФ±10% ГОСТ 5.623-70 | 3 | |||||||||||||||
| Резистор | |||||||||||||||||
| R1 | МЛТ-0.125-15кОм±1.0% ОЖО.467.404 ТУ | 1 | |||||||||||||||
| Микросхемы | |||||||||||||||||
| DD1 | K555ТЛ1 5К 1,673,006ТУ11 | 1 | |||||||||||||||
| DD2 | К555ТМ2 6К 0,348,006ТУ14 | 1 | |||||||||||||||
| DD3 | К1830ВЕ35 8П 0,375,006ТУ18 | 1 | |||||||||||||||
| DD4 | К580ИР82 4В 0,244,006ТУ55 | 1 | |||||||||||||||
| DD5 | К580ВР43 3М 2,345,005ТУ32 | 1 | |||||||||||||||
| DD6 – DD8 | К514ИД1 6К 0,478,006ТУ47 | 3 | |||||||||||||||
| DD9 | К556РТ5 3Р 1,394,006ТУ99 | 1 | |||||||||||||||
| Индикаторы | |||||||||||||||||
| HG1 - HG3 | АЛС324А аА 0,336367ТУ | 3 | |||||||||||||||
| Вилки | |||||||||||||||||
| XS1 – XS3 | ОНП – КГ – 26 – 64/73xВ 0.324.027ТУ | 3 | |||||||||||||||
| ФЭТ КП.XXXXXX.007 ПЭ3 | |||||||||||||||||
| Лист | №докум. | Подп. | Дата | ||||||||||||||
| Разработ. | Ощепков | МИКРОКОНТРОЛЛЕР перечень элементов | Лиcт | Лист | Листов | ||||||||||||
| Провер. | Шевелев | 1 | |||||||||||||||
| Т.контр. | ТУСУР ФЭТ ПрЭ гр.367-3 | ||||||||||||||||
| Н.контр. | |||||||||||||||||
| Утв. | |||||||||||||||||
Похожие работы
... —к «массе». Качество отработки элементов вождения по трудным грунтам зависит от наличия и состояния цепей противоскольжения, трековых дорожек, матов и средств самовытаскивания 4. РАЗРАБОТКА КОНСТРУКЦИИ ДУБЛИРУЮЩЕГО УСТРОЙСТВА УПРАВЛЕНИЯ 4.1. ОПРЕДЕЛЕНИЕ РАСЧЕТНОЙ НАГРУЗКИ НА ВАЛ, ВОЗВРАТНЫЕ ПРУЖИНЫ И ПЕДАЛИ. Номинальное усилие на дополнительные педали тормоза и сцепления будет находиться в ...


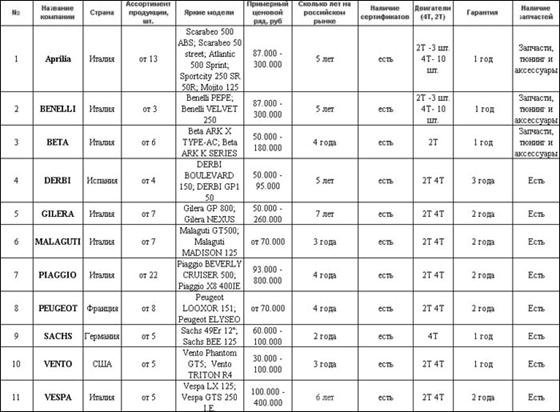
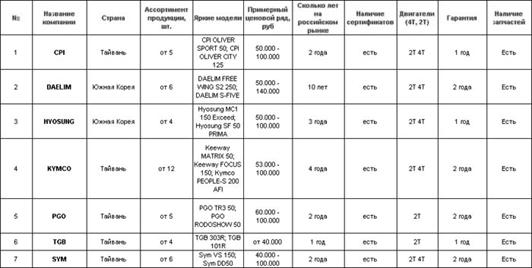
... Вы все же склоняетесь к покупке б/у японского скутера, рекомендуем прочитать обзор прошлого года и наши рекомендации по непосредственному выбору аппарата. 1000-1500$ В прошлом году на российском рынке появились новые 4-тактные китайские скутеры, цена которых составляет сегодня 1000-1500$. Гарантия на такой скутер в среднем - 1 год. Сделаны эти аппараты специально для европейского рынка, имеют ...
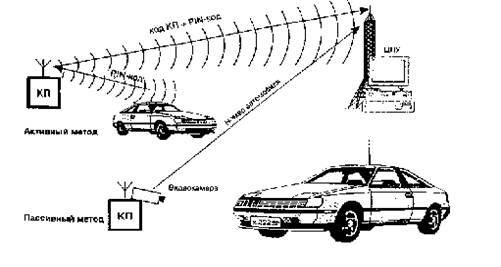
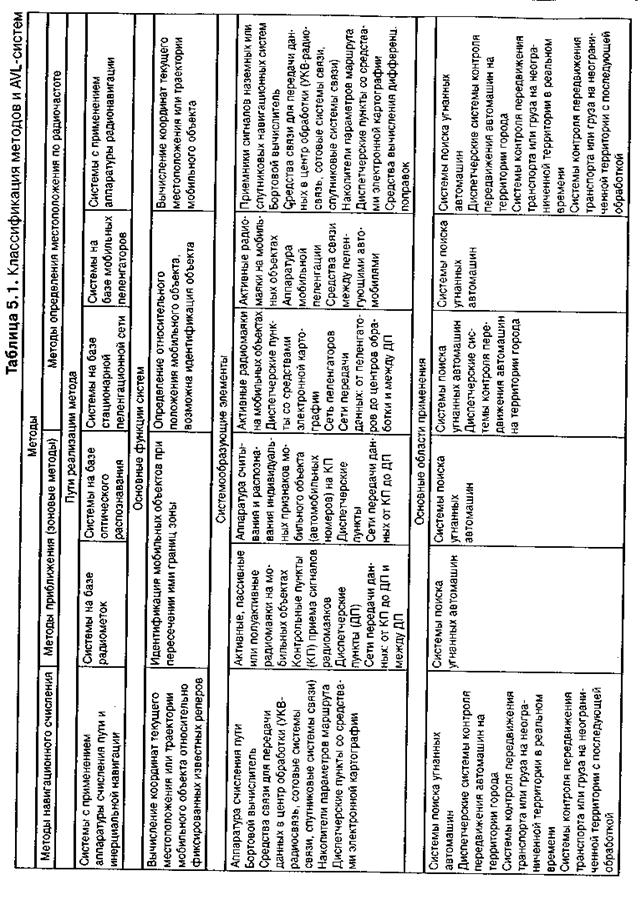

... 540x420x210 мм и имеет вес 13 кг; Ø Антенно-фидерная система скомпонована в радиопрозрачном колпаке диаметром 295 мм, высотой — 140 мм, весом 3 кг.[1] 4. Предложение системы защиты от слежения за автомобилем Итак, имеется автомобиль УАЗ - 462, перевозящий ценный груз, на котором скрыто установлена система, включающая GPS – приемник и GSM – передатчик и определяющая координаты данного ...
... учреждении и принимаемых мер по фактам дорожно-транспортных происшествий с участием детей. 2.2 План внеклассных мероприятий по профилактике детского дорожно-транспортного травматизма № пп МЕРОПРИЯТИЯ СРОК ОТВЕТСТВЕННЫЕ 1. Проведение уроков изучения Правил дорожного движения согласно программе Ежемесячно Классный руководитель 2. Проведение бесед на родительских ...
0 комментариев