Навигация
Обоснование алгоритма работы устройства
26826
знаков
1
таблица
5
изображений
4 Обоснование алгоритма работы устройства
Так как измерение скорости основано на эффекте Доплера, необходимо связать доплеровский сдвиг частоты отражённого сигнала со скоростью автомобиля (в м/с):

для перевода скорости в км/ч умножим её на 3.6:
 (1)
(1)
Несущие частоты излучателей f1 и f2 выбираем равными 200 МГц и 100 МГц соответственно. Подставив в выражение (1) значение скорости света ![]() м/с и несущие частоты f1 и f2, получим:
м/с и несущие частоты f1 и f2, получим: ![]() . Частоту Доплера будем измерять методом подсчёта числа импульсов N генератора тактовых импульсов с периодом следования t :
. Частоту Доплера будем измерять методом подсчёта числа импульсов N генератора тактовых импульсов с периодом следования t :
таким образом, искомая скорость автомобиля в км/ч: 
Выбираем t = 0.27 мс, тогда ![]() . Для работы с целыми числами сначала вычислим
. Для работы с целыми числами сначала вычислим ![]() , а затем отбросим младшую цифру, при этом добавлением 5 производится округление.
, а затем отбросим младшую цифру, при этом добавлением 5 производится округление.
Для скорости автомобиля от 11 до 216 км/ч (3 ... 60 м/с), число N будет находиться в диапазоне от 1851 до 92.
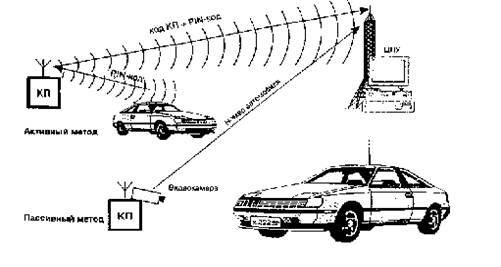
Возвращаясь к функциональной схеме, нулевой уровень будем использовать для измерения частоты Доплера Fд, а при единичном - будем производить вычисление скорости Va и вывод её значения на индикаторы. Далее нужно производить контроль измеренной скорости автомобиля и передавать управление фотосъёмочной аппаратуре, если водитель автомобиля нарушил правила дорожного движения, превысив скорость. При этом фотоснимок будет сделан в тот момент, когда фотодатчик сформирует сигнал на входе T1. Активным является нулевой его уровень, коммутируемый на линию P7.0 для срабатывания фотоаппарата.
5 Разработка управляющей программы
5.1 Схема алгоритма
Схема алгоритма работы управляющей программы изображена на рисунке 5.1. После подачи сигнала сброса SR производится настройка портов P1 и P2 на вывод информации, осуществляется загрузка регистров R1-R0 первого банка регистров общего назначения микроконтроллера (РОН) инверсным двоично-десятичным числом максимально допустимой скорости, набранным на портах P6,P5,P4. После сброса на линии P7.0 (фотосъёмка) окажется неактивный единичный уровень.
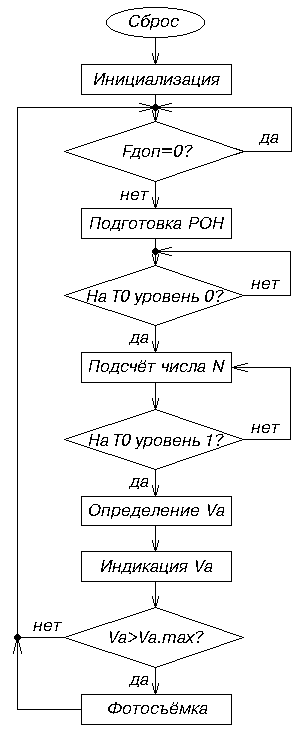
Рисунок 5.1 - Схема алгоритма управляющей программы
Затем микроконтроллер переходит в состояние ожидания импульса на своём входе T0 (см. рисунок 5.1). После его появления осуществляется подготовка РОНов используемого нулевого банка. Далее, дождавшись нулевого уровня импульса, микроконтроллер осуществляет измерение Fдоп , то есть определение числа импульсов “генератора” тактовых импульсов с фиксированным периодом следования. ”Генератор” тактов основан на использовании временной задержки на время t = 0.27 мс. Подсчёт количества таких импульсов проводится в течении всей длительности нулевого уровня T0. Далее, в соответствии с подсчитанным числом N определяется скорость, при этом деление выполняется методом подсчёта количества сложений числа N до превышения суммой (S) числа ![]() . Затем найденная скорость выводится на индикаторы.
. Затем найденная скорость выводится на индикаторы.
Вычисленная на предыдущем этапе работы программы скорость сравнивается с максимально допустимой скоростью. В случае превышения скорости микроконтроллер ждёт появления на входе T1 импульса (нулевого уровня при срабатывании фотодатчика) и коммутирует его на линию P7.0, при этом производится фотосъёмка автомашины.
Если скорость не превышена (или после фотосъёмки), работа программы повторяется с момента ожидания микроконтроллером импульсов на входе T0.
5.2 Пояснения к программе
Листинг управляющей программы приведён в приложении А. Программа организована в виде нескольких подпрограмм как законченных функциональных модулей, это существенно улучшает восприятие текста программы при чтении. Основная программа осуществляет инициализацию, подготовку РОНов, вывод скорости в порты P4,P5,P6 для индикации, сравнение найденной скорости с максимальной путём побайтного сложения значения скорости с инверсным значением максимальной скорости и отслеживания признака переноса. Подпрограмма N осуществляет подсчёт числа N по нулевому уровню. Подпрограмма Y подсчитывает по заданному N число Y на протяжении единичного уровня импульса. Подпрограмме PHOTO передаётся управление, если полученная скорость больше максимально допустимой. Все вычисления производятся с использованием двоично-десятичного представления N(R1,R0) и Y(R6,R5). При этом переменные N и Y имеют двухбайтовый формат, то есть хранятся в двух РОНах. Накопитель S, использующийся при выполнении операции деления, имеет трёхбайтовый формат и хранится в РОНах R4,R3,R2. Сложение числа N в накопителе идёт до тех пор, пока в пятом бите старшего регистра S (R4) не появится 1, что соответствует числу ![]() (если все остальные биты - 0).
(если все остальные биты - 0).
Определим значение константы Z, которая загружается в регистр R7 для реализации фиксированной временной задержки t = 0.27 мс: ![]() мс,
мс,
2.5 мкс - время одного машинного цикла при подключении кварца частоты 6 МГц;
14 - число машинных циклов выполнения команд подпрограммы N, которые надо учесть наряду с основной задержкой в счётчике R7.
Отсюда Z=47=2Fh.
Отметим, что для реализации вычислений задействованы десять РОНов, аккумулятор и одна ячейка стека микроконтроллера. Основные преобразования реализуются в аккумуляторе с использованием команд сложения и десятичной коррекции. Многобайтовые переменные формируются путём последовательного преобразования отдельных байтов.
Похожие работы
... —к «массе». Качество отработки элементов вождения по трудным грунтам зависит от наличия и состояния цепей противоскольжения, трековых дорожек, матов и средств самовытаскивания 4. РАЗРАБОТКА КОНСТРУКЦИИ ДУБЛИРУЮЩЕГО УСТРОЙСТВА УПРАВЛЕНИЯ 4.1. ОПРЕДЕЛЕНИЕ РАСЧЕТНОЙ НАГРУЗКИ НА ВАЛ, ВОЗВРАТНЫЕ ПРУЖИНЫ И ПЕДАЛИ. Номинальное усилие на дополнительные педали тормоза и сцепления будет находиться в ...


... Вы все же склоняетесь к покупке б/у японского скутера, рекомендуем прочитать обзор прошлого года и наши рекомендации по непосредственному выбору аппарата. 1000-1500$ В прошлом году на российском рынке появились новые 4-тактные китайские скутеры, цена которых составляет сегодня 1000-1500$. Гарантия на такой скутер в среднем - 1 год. Сделаны эти аппараты специально для европейского рынка, имеют ...

... 540x420x210 мм и имеет вес 13 кг; Ø Антенно-фидерная система скомпонована в радиопрозрачном колпаке диаметром 295 мм, высотой — 140 мм, весом 3 кг.[1] 4. Предложение системы защиты от слежения за автомобилем Итак, имеется автомобиль УАЗ - 462, перевозящий ценный груз, на котором скрыто установлена система, включающая GPS – приемник и GSM – передатчик и определяющая координаты данного ...
... учреждении и принимаемых мер по фактам дорожно-транспортных происшествий с участием детей. 2.2 План внеклассных мероприятий по профилактике детского дорожно-транспортного травматизма № пп МЕРОПРИЯТИЯ СРОК ОТВЕТСТВЕННЫЕ 1. Проведение уроков изучения Правил дорожного движения согласно программе Ежемесячно Классный руководитель 2. Проведение бесед на родительских ...
0 комментариев