Навигация
Представление динамического процесса в виде последовательности преобразований
24366
знаков
0
таблиц
0
изображений
1.2.2. Представление динамического процесса в виде последовательности преобразований
Предположим, что динамический процесс х(с, t) на интервале от 0 до tf может быть естественным или искусственным образом представлен как многошаговый, и найдем подходящий способ описания такого процесса. Для того чтобы получить многошаговый процесс, интервал от 0 до tf следует разбить на n последовательных шагов, длительности которых примем равными τ1,τ2,..., τn. Обозначим через tk(k=0,...,n) моменты окончания k-го шага так, что tk+1= tk+τk+1, а через xk - состояние объекта в момент tk: xk=x(c,tk).
Рассмотрим состояние xk+1=x(c,tk+1)=x(c,tk+τk+1). Это выражение в можно представить в виде: xk+1=x[x(c,tk),τk+1]=x(xk,τk+1).
Это соотношение представляет состояние объекта xk+1 как результат преобразования состояния xk на (k+1)-м шаге.
Введем в рассмотрение оператор Т, который будет означать преобразование состояния процесса за один шаг:
Т (xk) = x(xk, τk+1), k = 0,n-1. Тогда получим: xk+1=Т (xk).
Полагая k=0,n-1, можем описать весь динамический процесс в виде последовательности преобразований
x0=c , x1=Т (x0), …, xn=Т (xn-1).
1.2.3. Многошаговый процесс управления
Динамический процесс, описываемый преобразованием xk+1=Т(xk), является неуправляемым. Для получения управляемого многошагового процесса необходимо иметь возможность на каждом шаге осуществлять не одно преобразование Т(хk), а одно из множества преобразований Тi(хk).
Удобно считать, что конкретный вид преобразования будет зависеть от параметра uk, который на k-м шаге может принимать одно из множества значений Uk. Параметр uk будем называть управлением, а множество Uk - пространством допустимых управлений на k-м шаге. Преобразование, осуществляемое на k-м шаге, теперь можно записать в виде
xk+1=Т(xk, uk), uk![]() Uk .
Uk .
Если в этом соотношении положить последовательно tk=0,n-1 и учесть начальное состояние х0, то получим описание всего управляемого многошагового процесса:
xk+1=Т(xk, uk), uk![]() Uk , tk=0,n-1, х0=x(0)=c.
Uk , tk=0,n-1, х0=x(0)=c.
Данное соотношение, называемое разностным уравнением объекта управления, аналогично дифференциальному уравнению, дающему описание непрерывного динамического процесса.
2. Оптимальное управление как вариационная задача
2.1. Математическая формулировка задачи оптимального управления
Характерной тенденцией в построении современных систем автоматического управления является стремление получать системы, которые в некотором смысле являются наилучшими. При управлении технологическими процессами это стремление выражается в том, чтобы улучать максимальное количество продукции высокого качества при ограниченном использовании ресурсов (сырья, энергии и т.п.). В системах управления кораблями, самолетами, ракетами стремятся минимизировать время, по истечении которого объект выходит в заданную точку или на заданную траекторию при ограничении угла отклонения рулей, количества расходуемого топлива и т. п. В следящих и стабилизирующих системах представляет интерес достижение максимальной точности при наличии всевозможных ограничений, накладываемых на координаты регулируемого объекта, исполнительные элементы и регулятор. Во всех этих примерах задачи управления сводятся к нахождению наилучшего в определенном смысле слова процесса из множества возможных процессов, т.е. относятся к классу динамических задач управления.
Как было показано ранее, математическая формулировка динамических задач оптимального управления сводится к следующему. Имеется объект управления, состояние которого характеризуется многомерной переменной х={х1,…,xn}. Характер процессов в объекте управления можно изменять, используя то или иное упвление u из пространства допустимых правлений U. В общем случае управление u![]() U может быть также многомерной величиной u={u1,...,um}. Характер движения объекта управления описывается системой дифференциальных уравнений х=g (х, u), х (0)=с.
U может быть также многомерной величиной u={u1,...,um}. Характер движения объекта управления описывается системой дифференциальных уравнений х=g (х, u), х (0)=с.
За критерий качества управления принимается интегральная оценка вида
J(u)= ,имеющая физический смысл потерь, где Т- время протекания процесса управления, a Q[x(t), u(t)]=q(t) - мгновенные потери в момент t при состоянии системы x(t) и управлении u(t). Добавочными ограничениями могут быть ограничения, накладываемые на количество ресурсов или пределы изменения некоторых параметров, выражающиеся математически соотношением
,имеющая физический смысл потерь, где Т- время протекания процесса управления, a Q[x(t), u(t)]=q(t) - мгновенные потери в момент t при состоянии системы x(t) и управлении u(t). Добавочными ограничениями могут быть ограничения, накладываемые на количество ресурсов или пределы изменения некоторых параметров, выражающиеся математически соотношением
 .
.
Как было установлено ранее, оптимальным называется такое управление u* из множества допустимых управлений U, при котором для объекта, описываемого дифференциальным уравнением, и заданных ограничениях на используемые ресурсы критерий качества управления принимает минимальное (максимальное) значение.
Сформулированная подобным образом задача оптимального управления относится к классу вариационных задач, решением которых занимается раздел математики, получивший название вариационного исчисления. Величина J(u) получила название функционала. В отличие от функции, например, f(x), численные значения которой задаются на множестве значений аргумента х, численные значения функционала J(u) задаются на множестве всевозможных управлений u(t). Задача нахождения оптимального управления сводится к тому, чтобы из множества допустимых управлений U выбрать такое, при котором функционал J(t) принимает минимальное численное значение.
2.2. Постановка вариационной задачи
Обычно задачи, требующие минимизации функционала, подчиненного дифференциальному соотношению, при наличии интегрального ограничения заменяются минимизацией нового функционала
J(u)= + λ ,
,
подчиненного только дифференциальному соотношению. Параметр λ, в функционале, получивший название множителя Лагранжа, в задачах оптимизации управления играет роль «цены» ограниченных ресурсов. Его значение находится из граничных условий вариационной задачи.
Возможность упрощения вариационной задачи с интегральными ограничениями посредством введения множителей Лагранжа вытекает из следующей теоремы.
Теорема 1. Если u(t)-оптимальное управление, при котором функционал J(u)=+λ достигает абсолютного минимума и выполняется ограничение , тогда при u(t) достигается абсолютный минимум функционала J(u)=, подчиненного ограничению.
Доказательство: следует от противного. Пусть v(t)-другое управление, отличное от u(t), причем такое, что  <
<
и выполнено условие .
Тогда +λ ≤+λK<
≤+λK< +λK=
+λK=
=+λ , что противоречит предположению, что u(t) обращает J(u)=+λ в минимум.
, что противоречит предположению, что u(t) обращает J(u)=+λ в минимум.
Важнейшим понятием вариационного исчисления является понятие вариации функции, которое при исследовании функционалов играет такую же роль, как дифференциал при исследовании функций.
Пусть f(x) – функция, непрерывная на интервале [a,b]. Рассмотрим внутреннюю точку х этого интервала и некоторое фиксированное значение дифференциала аргумента функции ∆x=dx. Разность f(x+∆x)-f(x)=df(x)=f(x)∆x называется дифференциалом функции f(x) в точке х. Как известно, условие df(x)=0 является необходимым условием минимума (максимума) функции f(x) в точке х.
Получим аналогичные соотношения в вариационноми исчислении.
Рассмотрим задачу с закреплёнными концами при фиксированном времени.
Пусть задана некоторая целевая функция
J= à min, при условиях x(t0)=x0 , x(tf)=xf , t
à min, при условиях x(t0)=x0 , x(tf)=xf , t ![]() [t0,tf], x(t)
[t0,tf], x(t)![]() Rn, причём x(t) непрерывна, и дифференцируема.
Rn, причём x(t) непрерывна, и дифференцируема.
Пусть у нас имеется оптимальное решение x(t)=x*(t).
Проведём сдвиг от этого решения: выберем произвольную функцию η(t), такую, что η(t0)=η(tf)=0, η(t)![]() Rn ,причём η(t) непрерывна, и дифференцируема.
Rn ,причём η(t) непрерывна, и дифференцируема.
Таким образов выражение εη(t) есть не что иное, как ∆x для функции f(x), εη(t) называется вариацией функционала.
При фиксированных x(t) и η(t), наша целевая функция буде функцией от ε:
J(ε)= à min,
à min,
Решение этого уравнение известно, т.к. это будет достигаться при ε=0,x(t)=x*(t).
Разложим функцию J(ε) в ряд Тейлора в точке ε=0n:
J(ε)=J(0n)+![]() J(ε)ε +
J(ε)ε +![]()
![]() 2J(ε)ε2 + o(∆x).
2J(ε)ε2 + o(∆x).
Необходимое условие минимума J(ε)-J(0n) ≥0, тогда получим
J(ε)-J(0n)=![]() J(ε)ε +
J(ε)ε +![]()
![]() 2J(ε)ε2 + o(∆x) ≥0.
2J(ε)ε2 + o(∆x) ≥0.
Для того, чтобы неравенство выполнялось первое слагаемое должно равняттся нулю (т.к. оно может принимать как положительные, так и отрицательные значения):
![]() J(ε)=δJ=0 – I необходимое условие экстремума функционала.
J(ε)=δJ=0 – I необходимое условие экстремума функционала.
Если это условие выполняется, то получим
J(ε)-J(0n)=![]()
![]() 2J(ε)ε2 + o(∆x) ≥0,
2J(ε)ε2 + o(∆x) ≥0,
отбросим члены малости больше 2.
![]() 2J(ε)= δ2 J ( ≥ 0, ≤ 0)
2J(ε)= δ2 J ( ≥ 0, ≤ 0)
– второе необходимое условие экстремума функционала.
В вариационном исчислении условие δJ=0 используется для получения так называемого дифференциального уравнения Эйлера, среди множества решений которого и определяется затем управление u(t), обращающее в минимум функционал.
Применим выше изложенные рассуждения для вывода дифференциального уравнения Эйлера.
Воспользуемся I необходимое условие экстремума функционала![]() J(ε)=δJ=0.
J(ε)=δJ=0.
δJ=![]() J(ε)=
J(ε)=  =
= =
=
= =
= +
+ =| 2-й интеграл по частям |=
=| 2-й интеграл по частям |=
=  + –
+ –  =
=  ≡ 0.
≡ 0.
Т.е. получим δJ=≡ 0.
По основной лемме вариационного исчисления: если есть функции r(t) и g(t), при t![]() [t0,tf], причём
[t0,tf], причём
g(t0)=g(tf)=0 и = ≡ 0 , то r(t) ≡ 0 для любых t
≡ 0 , то r(t) ≡ 0 для любых t![]() [t0,tf].
[t0,tf].
Значит для
δJ=≡ 0 получим, что  ≡0, i=1,n.
≡0, i=1,n.
Полученное уравнение называется уравнением Эйлера (оно выражает 1-е необходимое условие экстремума функционала).
2.3. Трудности, связанные с решением вариационной задачи
При отыскании оптимального управления вариационными методами приходится сталкиваться с трудностями, ряд которых носит принципиальный характер:
1. Вариационные методы дают возможность находить только относительные максимумы и минимумы функционала J(u), тогда как интерес представляет нахождение абсолютного максимума или минимума.
2. Уравнения Эйлера для многих технических задач оказываются нелинейными, что часто не дает возможности получить решение вариационной задачи в явном виде.
3. На значения управляющих сигналов обычно бывают наложены ограничения, делающие невозможным поиск оптимального управления вариационными методами.
Поскольку последнее обстоятельство имело решающее значение для развития новых идей в области оптимального управления, остановимся на нем более подробно.
Обычными ограничениями, накладываемыми на сигналы управления, являются ограничения вида |ui(t)|≤ Mi.
Означающие необходимость ограничения по величине сигналов, подводимых к органам управления. Так, ограниченными являются предельное напряжение, подводимое к якорю электродвигателя, предельный угол поворота руля самолета, предельная температура в камере эрания реактивного двигателя и т.п. При этом получение оптимальных процессов требует, как правило, поддержания сигналов управления на предельных значениях, что соответствует наиболее быстрому и эффективному протеканию процессов в объекте управления. Типичный для этих случаев характер изменения управления u(t) при оптимальном процессе приведен на рис.1.
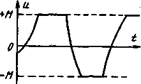
Рис.1. Характерный вид оптимального управляющего сигнала
Однако предельные значения управления u(t) лежат на границах области допустимых управлений U и, следовательно, не являются внутренними точками этой области, для которых только и применимы вариационные
Один из подходов к вычислению оптимальных процессов получил название динамического программирования. Метод динамического программировании дает в руки инженера эффективную вычислительную процедуру решения задачи оптимизации управления, хорошо приспособленную к использованию ЭВМ. Этот метод мы рассмотрим более подробно.
Похожие работы
... среди математиков, его разделяли А.Н.Колмогоров, И.М.Гельфанд, В.И.Арнольд, С.П.Новиков и др. Нельзя не восхищаться естественностью и внутренней стройностью математической работ Л.В. по двойственности линейного программирования и их экономической интерпретацией. 2. О математической экономике как области математики и о некоторых ее связях А) Связи линейного программирования с функциональным и ...
... решения останется неизменным, т.е. будет состоять из переменных (Х3,Х6,Х4,Х5). СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Смородинский С.С., Батин Н.В. Методы и алгоритмы для решения оптимизационных задач линейного программирования. Ч.1. – Мн.: БГУИР, 1995. 2. Смородинский С.С., Батин Н.В. Методы и алгоритмы для решения оптимизационных задач линейного ...

... переменных, доставляющих экстремум линейной целевой функции при m ограничениях в виде линейных равенств или неравенств. Линейное программирование представляет собой наиболее часто используемый метод оптимизации. К числу задач линейного программирования можно отнести задачи: · рационального использования сырья и материалов; задачи оптимизации раскроя; · оптимизации производственной программы ...
... от года-x и от номера месяца в году-y следующим образом: F(x)=50-x2+10x-y2+10y. Определите, в каком году и в каком месяце прибыль была максимальной. Зав. кафедрой -------------------------------------------------- Экзаменационный билет по предмету МЕТОДЫ ОПТИМИЗАЦИИ Билет № 22 1) Постановка вариационной задачи с ограничениями. Привести пример. 2) Дайте геометрическую ...
0 комментариев